







目录
1.作者

2.论文整体结构
本文作者的主要贡献是针对边界扭曲,失真等问题,级联了三种损失函数共同制约网络。
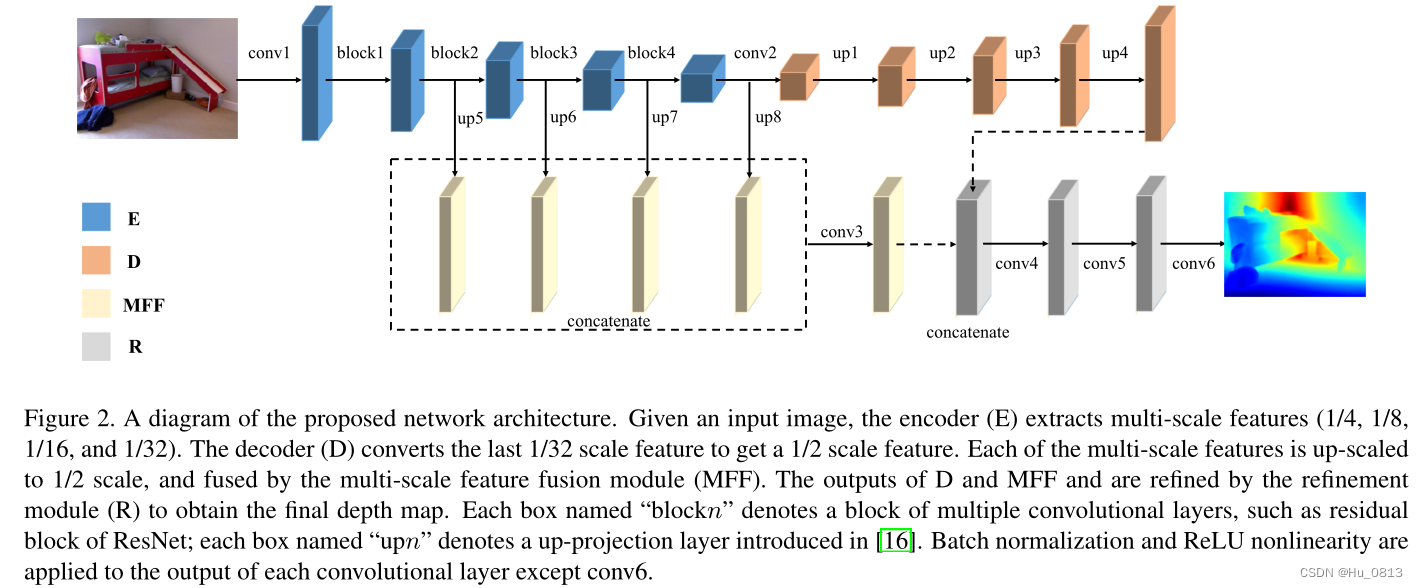
前向传播过程
1. 在Encoder 得到的四种分辨率不同的特征图,c1,c2,c3,c4.
2. MFF模块是将c1,c2,c3,c4统一上采样到相同分辨率,然后进行concat拼接,作为MFF的输出.
3. D模块就是将c4逐层使用双线性插值上采样到MFF输出的分辨率.
4. D和MFF拼接之后经过多次卷积得到最终输出.
模型比较简单,基本上就是级联了多个3x3卷积和5x5卷积,毕竟是18年的文章。而这篇文章主要的创新点就是在损失函数这一块,比较有特点,引用量也达到了200+.
3.损失函数
论文使用了3种损失函数共同制约网络,分别是L1损失,grad损失,以及法线normal损失。
3.1. Loss_depth
相对于传统的 L1 损失,作者使用了 log 空间下的损失,原因是因为距离拍摄源相对远的位置,即使是相同大小的物体,在成像之后,二者占据空间大小不同。比如下面这个图中,后方的人只占据了帽子大小的像素空间。因此后方人的深度位置较难准确估计出,并且后方像素值较大,相对误差也较大。而 Log 函数抑制了这一现象,让附近点损失贡献更大,远处点损失贡献小一点。 右图坐标系x是predict与GT的差值,可以看到loss更关注拍摄源附近点。(例子可能不太适合,不是室内)


,where F = ln( || predict - Gt || + 0.05)
3.2. Loss_grad
作者使用sobel算子提取预测图和GT之间的梯度做比较,进一步让网络注意到梯度信息。这一部分可以直接看代码。个人感觉在计算dx,dy的时候应该加上绝对值。左下图是不加绝对值
class Sobel(nn.Module):
def __init__(self):
super(Sobel, self).__init__()
self.edge_conv = nn.Conv2d(1, 2, kernel_size=3, stride=1, padding=1, bias=False)
edge_kx = np.array([[1, 0, -1], [2, 0, -2], [1, 0, -1]])
edge_ky = np.array([[1, 2, 1], [0, 0, 0], [-1, -2, -1]])
edge_k = np.stack((edge_kx, edge_ky))
edge_k = torch.from_numpy(edge_k).float().view(2, 1, 3, 3)
self.edge_conv.weight = nn.Parameter(edge_k)
for param in self.parameters():
param.requires_grad = False
def forward(self, x):
out = self.edge_conv(x)
out = out.contiguous().view(-1, 2, x.size(2), x.size(3))
return out
get_gradient = Sobel()
depth_grad = get_gradient(depth)
output_grad = get_gradient(output)
depth_grad_dx = depth_grad[:, 0, :, :].contiguous().view_as(depth)
depth_grad_dy = depth_grad[:, 1, :, :].contiguous().view_as(depth)
output_grad_dx = output_grad[:, 0, :, :].contiguous().view_as(depth)
output_grad_dy = output_grad[:, 1, :, :].contiguous().view_as(depth)
loss_dx = torch.log(torch.abs(output_grad_dx - depth_grad_dx) + 0.5).mean()
loss_dy = torch.log(torch.abs(output_grad_dy - depth_grad_dy) + 0.5).mean()
loss_grad = loss_dx + loss_dy 

3.3. Loss_normal

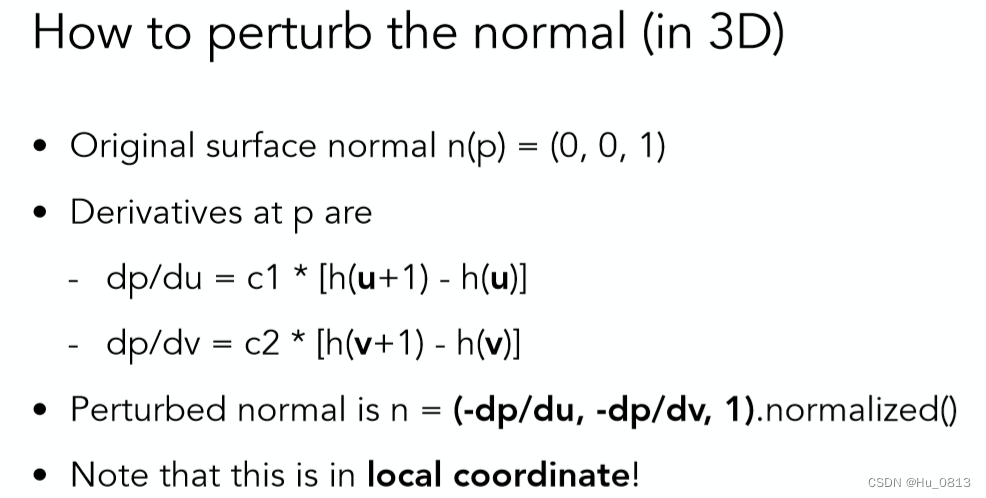
看公式不好理解,可以看代码,代码比较容易理解多了。本文normal是通过Bump Maps求解。
Bump Maps存储的是该点逻辑上的相对高度(可为负值,本文深度图的结果被归一化到了(0-1)之间,与现在流行的转化为现实距离(0-10)不同,该高度的变化实际上表现了物体表面凹凸不平的特质,利用该高度信息,再计算出该点法线向量。
直接引用计算机图形学里的内容(How to perturb the normal)
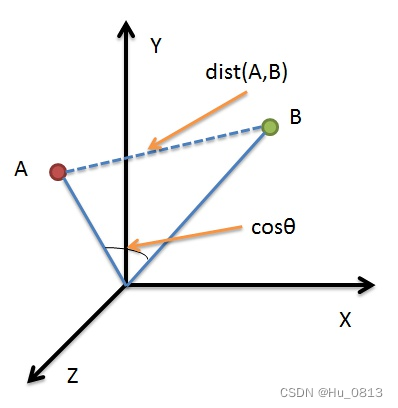
在计算出法线向量之后,作者又使用了cos函数计算了两个法线之间的角度:(1 - 余弦相似度)
余弦相似度更加注重两个向量在方向上的差异,而非距离或长度上(其实我认为也可以做减法,可以尝试一下。如下图的空间坐标系,假设predict 点A 与 GT对应点B,在方向上重合,那B可能比A的欧式距离更长,而且CNN具有平移不变性,感觉方向上没什么问题。个人猜测,可以私信我探讨。)

depth_normal = torch.cat((-depth_grad_dx, -depth_grad_dy, ones), 1)
output_normal = torch.cat((-output_grad_dx, -output_grad_dy, ones), 1)
loss_normal = torch.abs(1 - cos(output_normal, depth_normal)).mean()为了证明三种损失的有效性,消融对比如下 from left to right : GT, Predict of Ldepth, predict of Loss_all


Reference
衡量两个向量相似度的方法:余弦相似度_code_learne的博客-CSDN博客_向量余弦相似度
闫令琪《现代计算机图形学入门》
















 1932
1932











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











