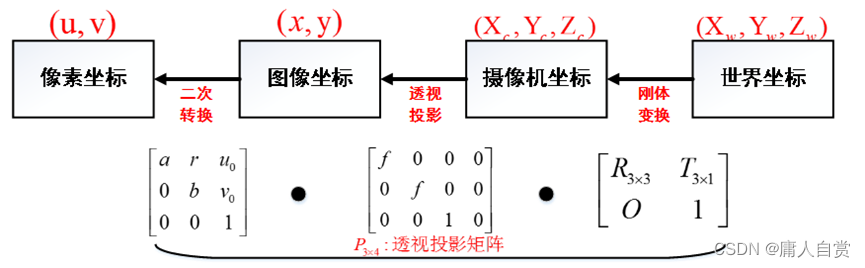
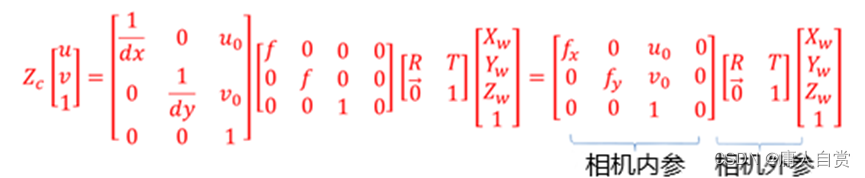
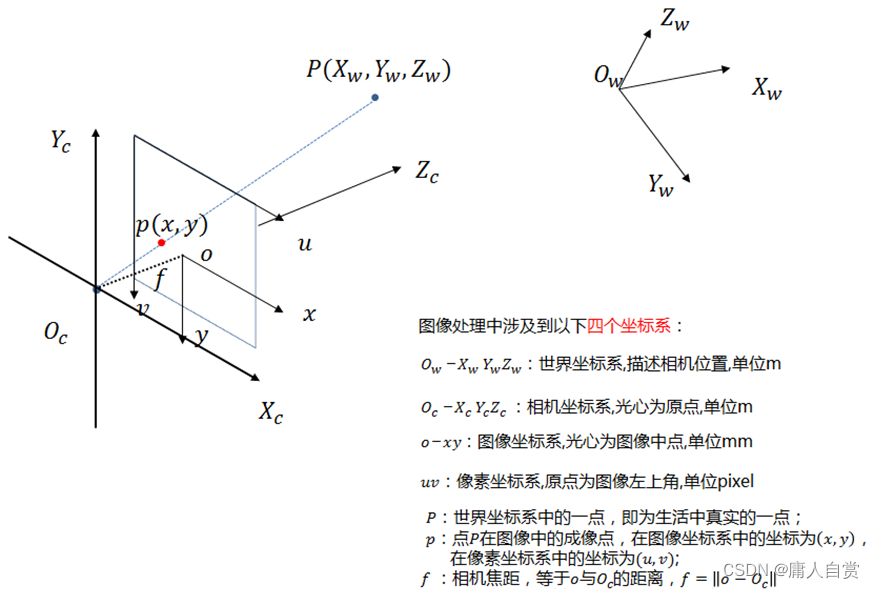
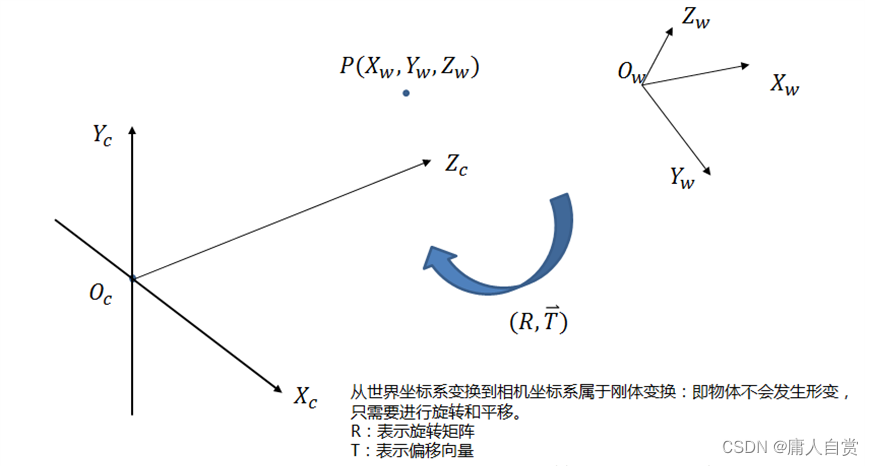
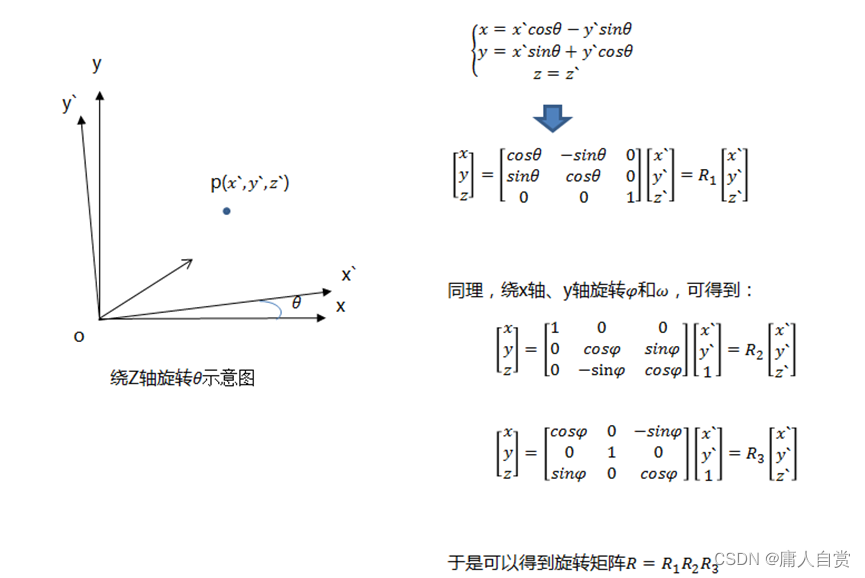
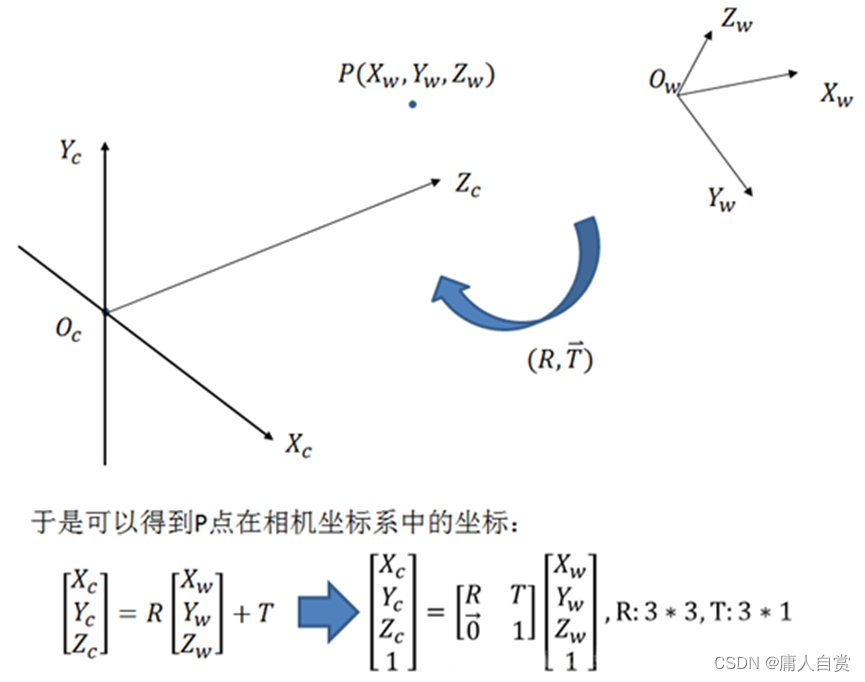
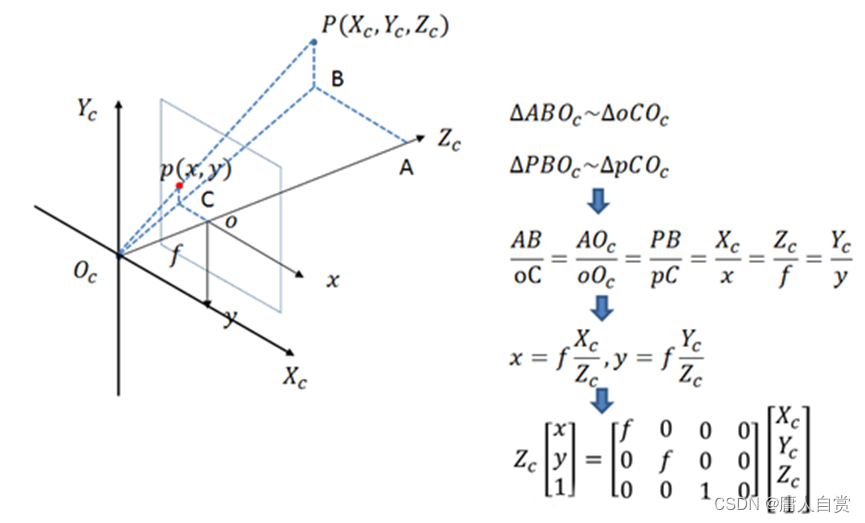
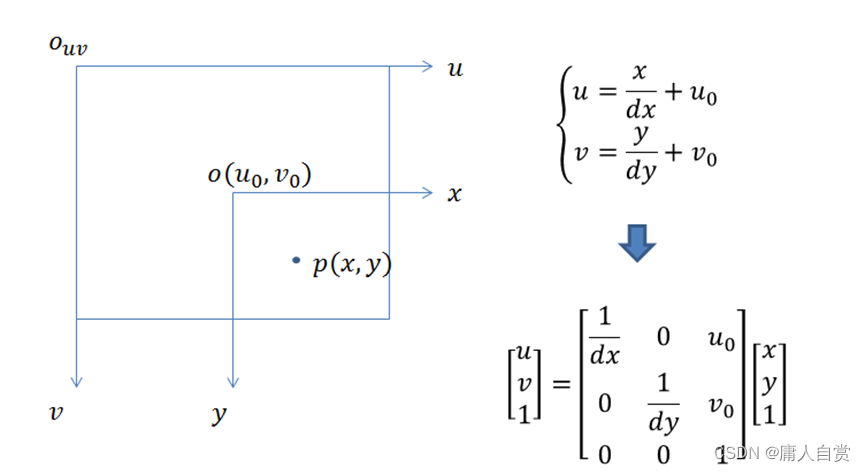
1)总体转换过程 2)四个基本坐标系 3)世界坐标系到相机坐标系 物体之间的坐标系变换都可以表示坐标系的旋转变换加上平移变换,则世界坐标系到相机坐标系的转换关系也是如此。绕着不同的轴旋转不同的角度得到不同的旋转矩阵。如下: 那么世界坐标系到相机坐标系的变换如下: 4)相机坐标系到图像物理坐标系 从相机坐标系到图像坐标系,属于透视投影关系,从3D转换到2D。 也可以看成是针孔模型的改变模型。满足三角形相似定理。 5)图像物理坐标系到像素坐标系 此时与前面的坐标系变换不同,此时没有旋转变换,但是坐标原点位置不一致,大小不一致,则设计伸缩变换及平移变换。























 641
641











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






