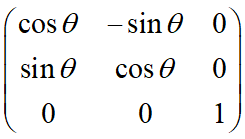
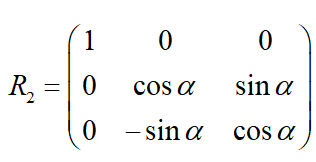
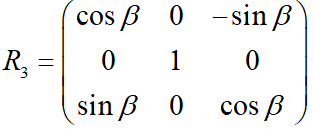
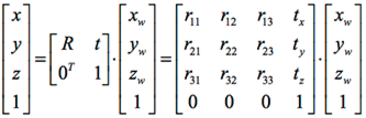
//学了这么久三维视觉,一直想更新一些相机模型基础知识,今天来填坑了。 //首先先讲解四个坐标系之间的变换。 一.世界坐标系到相机坐标系 //这是一个刚体变换,由于相机在不断运动,所以因为[R|T]旋转和位移矩阵将物体位姿变换到相机坐标系下。 //相机坐标系即是以相机光心为原点,光轴为Z轴的右手坐标系 //对于旋转矩阵,刚体变换可以分解为绕世界坐标系X,Y,Z轴分别以一定角度旋转 R1= R=R1R2R3= Pc=RPw + t 二.相机坐标系到图像坐标系 //将物点在相机坐标系下的坐标投影到像面上。 //其实就是两个相似三角形,做等比变换。










 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 557
557











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






