






滑模控制刚入门菜鸟一枚,找个实例练练手。参考刘金琨老师的《滑模变结构控制MATLAB仿真》中的基于趋近律的滑模鲁棒控制,对部分地方做出了修改。
考虑如下的被控对象:![]() ,其中,b>0,d(t)为外部干扰。
,其中,b>0,d(t)为外部干扰。
设计滑模面为:![]() ,其中
,其中![]()
求滑模面的一阶导数:![]()
采用指数趋近律:![]()
可以计算出系统所需的控制器(过程略):
![]()
但是由于干扰d未知,上述控制器无法实现,书中采用干扰的界来设计控制器。
设dc为干扰d的界相关的正实数,此时控制器为:
![]()
利用Lyapunov第二法证明系统稳定性,
设计Lyapunov函数:![]() ,对时间进行微分,得到:
,对时间进行微分,得到:![]()
要使系统稳定就得使负定,这就需要对dc进行合适地选取。
dc选取原则:
假设dL≤d≤dU,其中dL和dU分别为d的上下界,
①当s>0时,为了使<0,取dc=dL;
②当s<0时,为了使 >0,取dc=dU;
取d1=(du-dL)/2,d2=(du+dL)/2,那么可以设计满足上述两个条件的dc为:
![]()
这样可以始终保证 <0,从而保证系统的稳定。
但是刘金琨老师在书中使用的是符号函数sign(s),这里我改为了饱和函数sat(s),从而有效地减小了抖震。
改为饱和函数后,
控制器为:![]()
dc为:![]()
系统各参数取值: f(θ,t)=25,b=133,d(t)=10sin(πt),θd=sint,初始状态为[-0.15 -0.15];
控制率中各参数取值:c=25(书中取的15),ε=0.5,k=10。
控制器部分的代码(ctrl.m)为:
function [sys,x0,str,ts,simStateCompliance] = ctrl(t,x,u,flag,pa)
switch flag
case 0 % 初始化
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1 % 连续时间导数
sys=mdlDerivatives(t,x,u);
case 2 % 更新离散状态量
sys=mdlUpdate(t,x,u);
case 3 % 计算输出
sys=mdlOutputs(t,x,u,pa);
case 4 % 计算下一步采样时刻
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9 % 结束仿真
sys=mdlTerminate(t,x,u);
otherwise % 未知flag值
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end % S函数主程序结束
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes; simsizes;
sizes.NumContStates = 0; %连续状态个数
sizes.NumDiscStates = 0; %离散状态个数
sizes.NumOutputs = 1; %输出量个数
sizes.NumInputs = 3; %输入量个数
sizes.DirFeedthrough = 1; %直接馈通标志
sizes.NumSampleTimes = 1; % 至少有一个采样时刻
sys = simsizes(sizes);
x0 = []; % 状态初始化
str = []; % str 始终为空
ts = [0 0];% 初始化采样时间
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u)
sys = [];
function sys=mdlUpdate(t,x,u)
sys = [];
% 子函数 mdlUpdate 结束
function sys=mdlOutputs(t,x,u,pa)
thetad=u(1); %θd
thetad_dot=cos(t); %θd`
thetad_ddot=-sin(t); %θd``
theta=u(2); %θ
theta_dot=u(3); %θ`
b=pa.b;
epsilon=pa.epsilon;
k=pa.k;
c=pa.c;
dU=pa.dU;
dL=pa.dL;
e=thetad-theta;
de=thetad_dot-theta_dot;
s=c*e+de;
delta=pa.delta;
if abs(s)>delta
sat=sign(s);
else
sat=s/delta;
end
fx=25*theta;
d1=(dU-dL)/2;
d2=(dU+dL)/2;
dc=d2-d1*sat;
ut=1/b*(epsilon*sat+k*s+c*(thetad_dot-thetad)+thetad_ddot+fx-dc);
sys(1) = ut;
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1; % 例子。设置下一个采样时刻为1s后。
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];
% 子函数 mdlTerminate结束
系统部分的代码(plant.m)为:
function [sys,x0,str,ts,simStateCompliance] = plant(t,x,u,flag,pa)
switch flag
case 0 % 初始化
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1 % 连续时间导数
sys=mdlDerivatives(t,x,u,pa);
case 2 % 更新离散状态量
sys=mdlUpdate(t,x,u);
case 3 % 计算输出
sys=mdlOutputs(t,x,u);
case 4 % 计算下一步采样时刻
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9 % 结束仿真
sys=mdlTerminate(t,x,u);
otherwise % 未知flag值
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end % S函数主程序结束
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes; simsizes;
sizes.NumContStates = 2; %连续状态个数
sizes.NumDiscStates = 0; %离散状态个数
sizes.NumOutputs = 2; %输出量个数
sizes.NumInputs = 1; %输入量个数
sizes.DirFeedthrough = 0; %直接馈通标志
sizes.NumSampleTimes = 1; % 至少有一个采样时刻
sys = simsizes(sizes);
x0 = [-0.15 -0.15]; % 状态初始化
str = []; % str 始终为空
ts = [0 0];% 初始化采样时间
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u,pa)
b=pa.b;
ut=u(1);
theta_ddot = -25*x(2)+b*ut+10*sin(pi*t);
sys = [x(2);theta_ddot];
function sys=mdlUpdate(t,x,u)
sys = [];
function sys=mdlOutputs(t,x,u)
sys = [x(1); x(2)];
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1; % 例子。设置下一个采样时刻为1s后。
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];
% 子函数 mdlTerminate结束
参数部分(parameter.m)代码:
pa=struct('c',25,'b',133,'dL',-10,'dU',10,'epsilon',0.5,'k',10,'delta',0.05);simulink主程序:
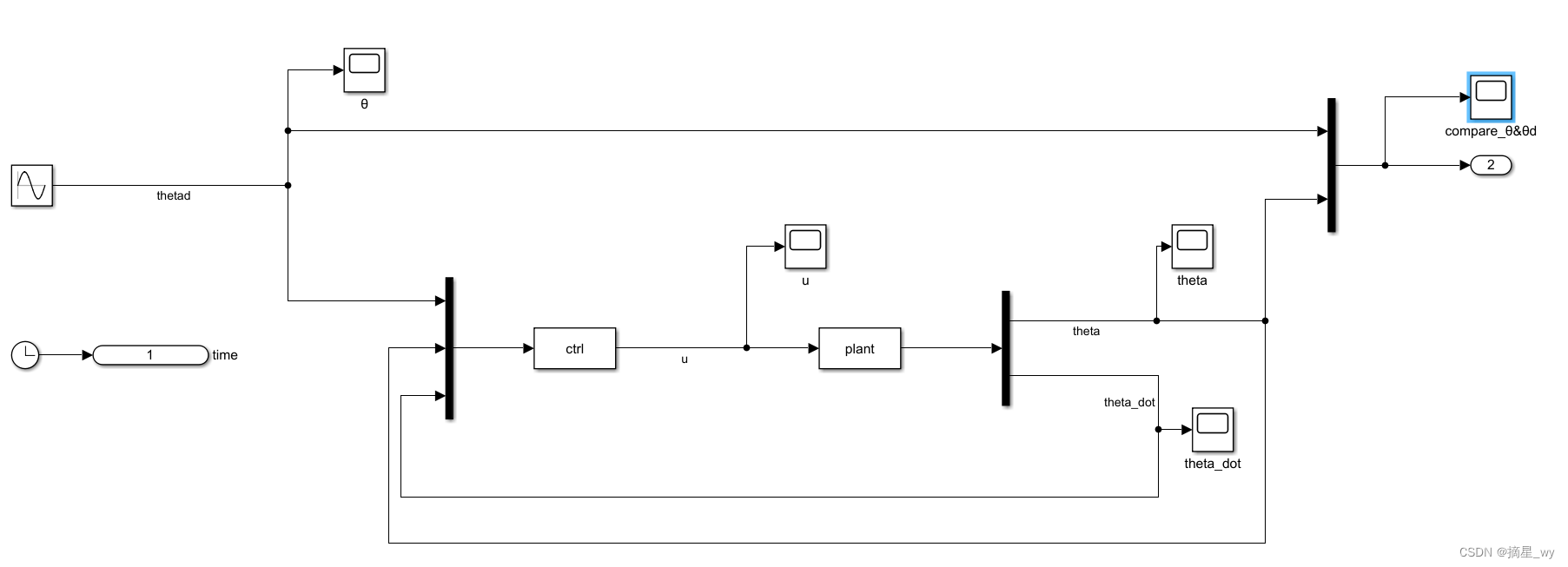
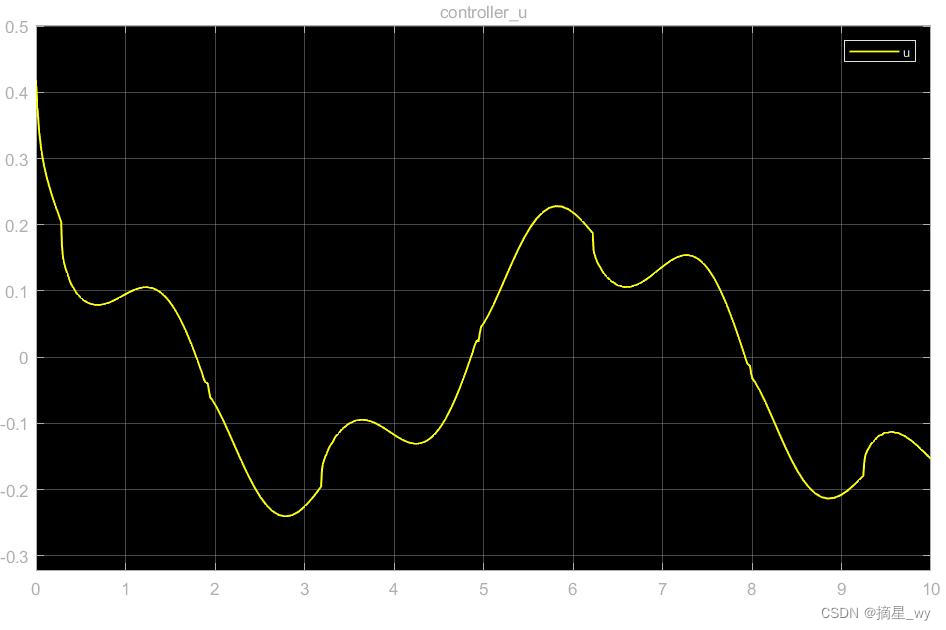
运行后得到控制器输出:
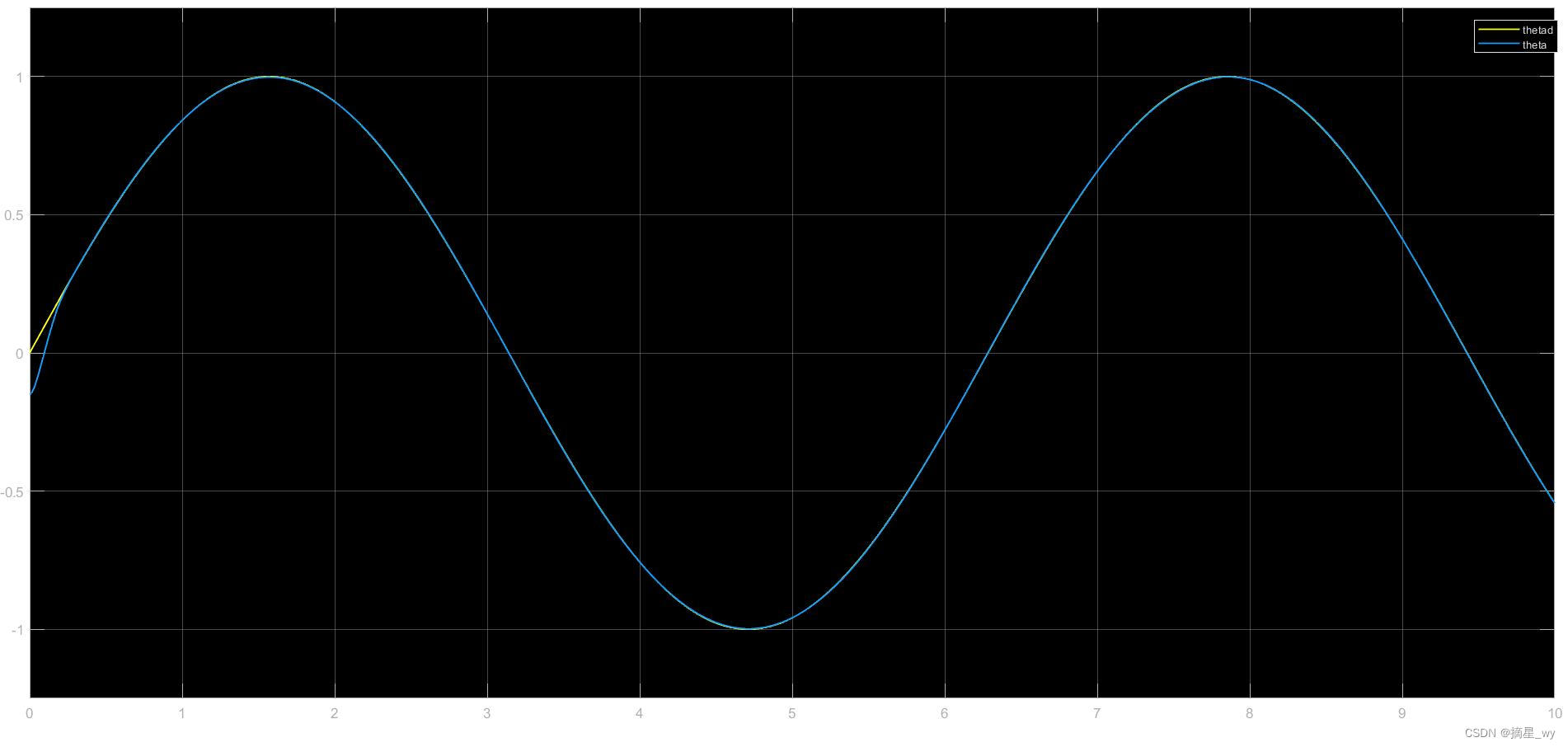
实际输出和理想输出的拟合情况还是比较理想的:















 1050
1050











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









