






MATLAB四旋翼仿真 滑模控制 simulink
三种控制方法 有公式和文献参考
1.滑模SMC
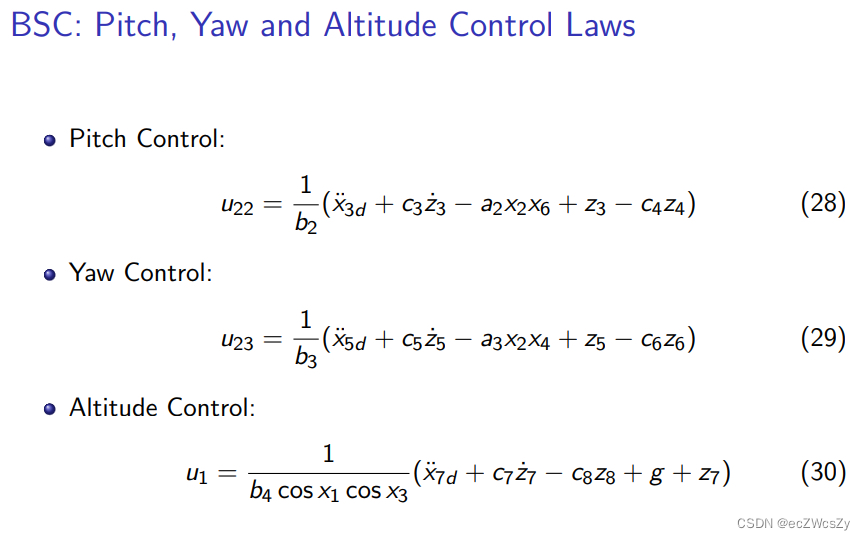
2.反步控制 backsteping control
3.pid控制
MATLAB四旋翼仿真 滑模控制 simulink
在无人机技术日益发展的今天,四旋翼飞行器作为一种重要的无人机类型,受到了广泛关注。为了提高四旋翼飞行器的飞行性能和稳定性,控制算法的选择显得尤为重要。本文将围绕MATLAB四旋翼仿真和滑模控制这两个主题展开讨论,同时探讨滑模控制与其他两种常见的控制方法——反步控制和PID控制的比较。
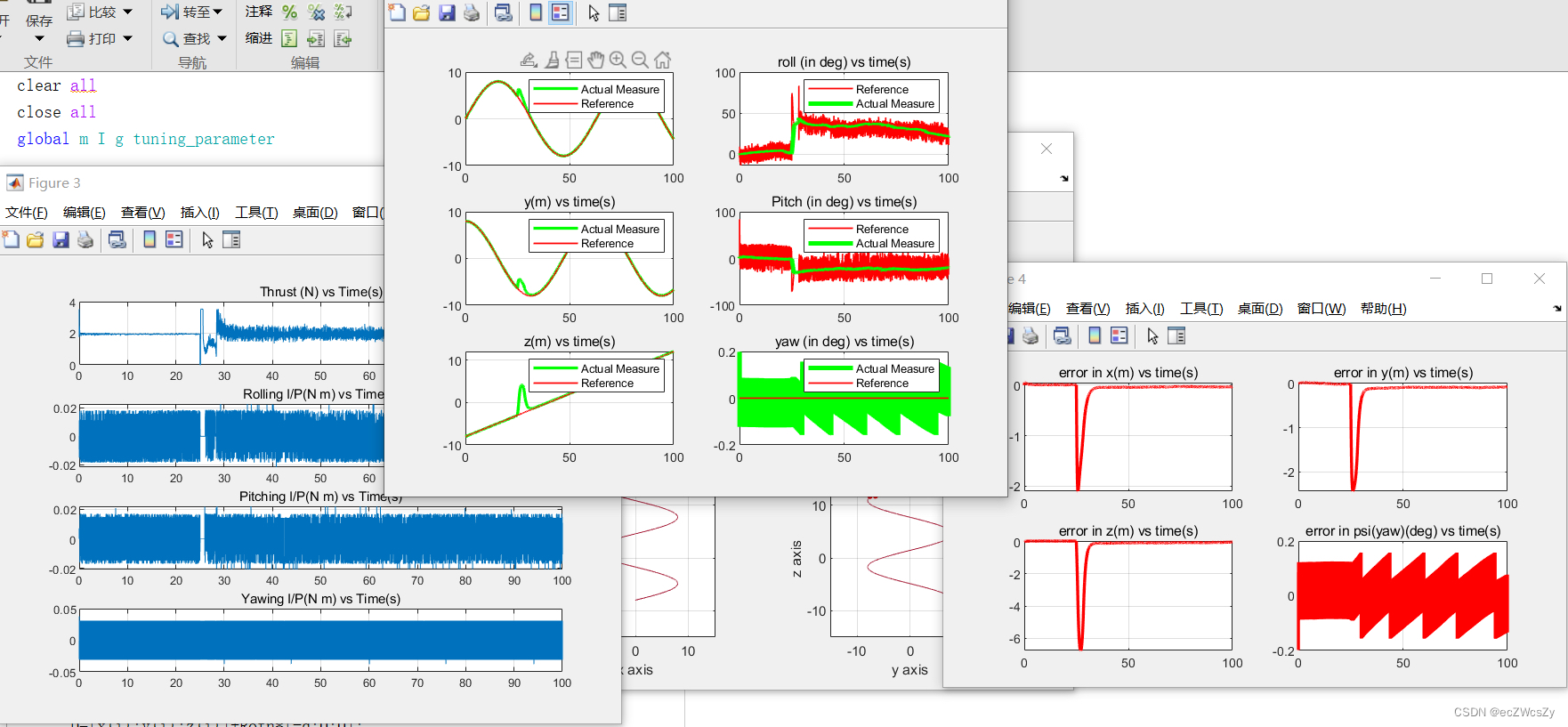
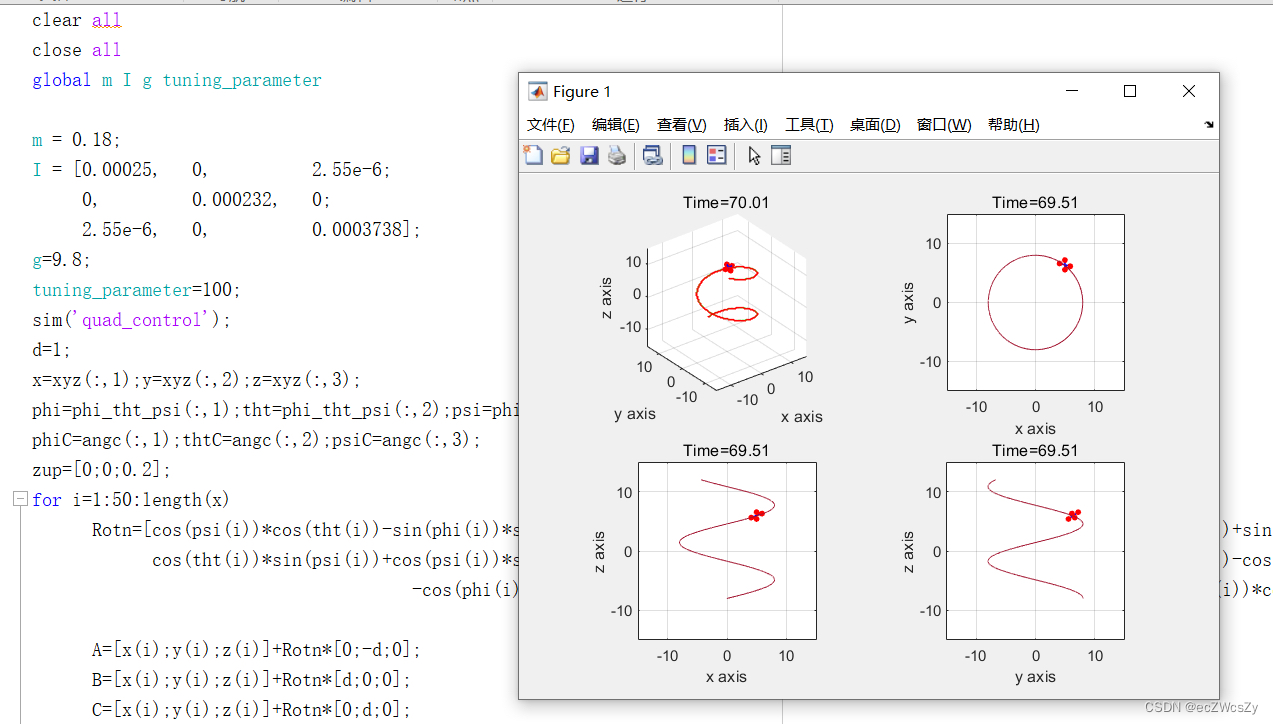
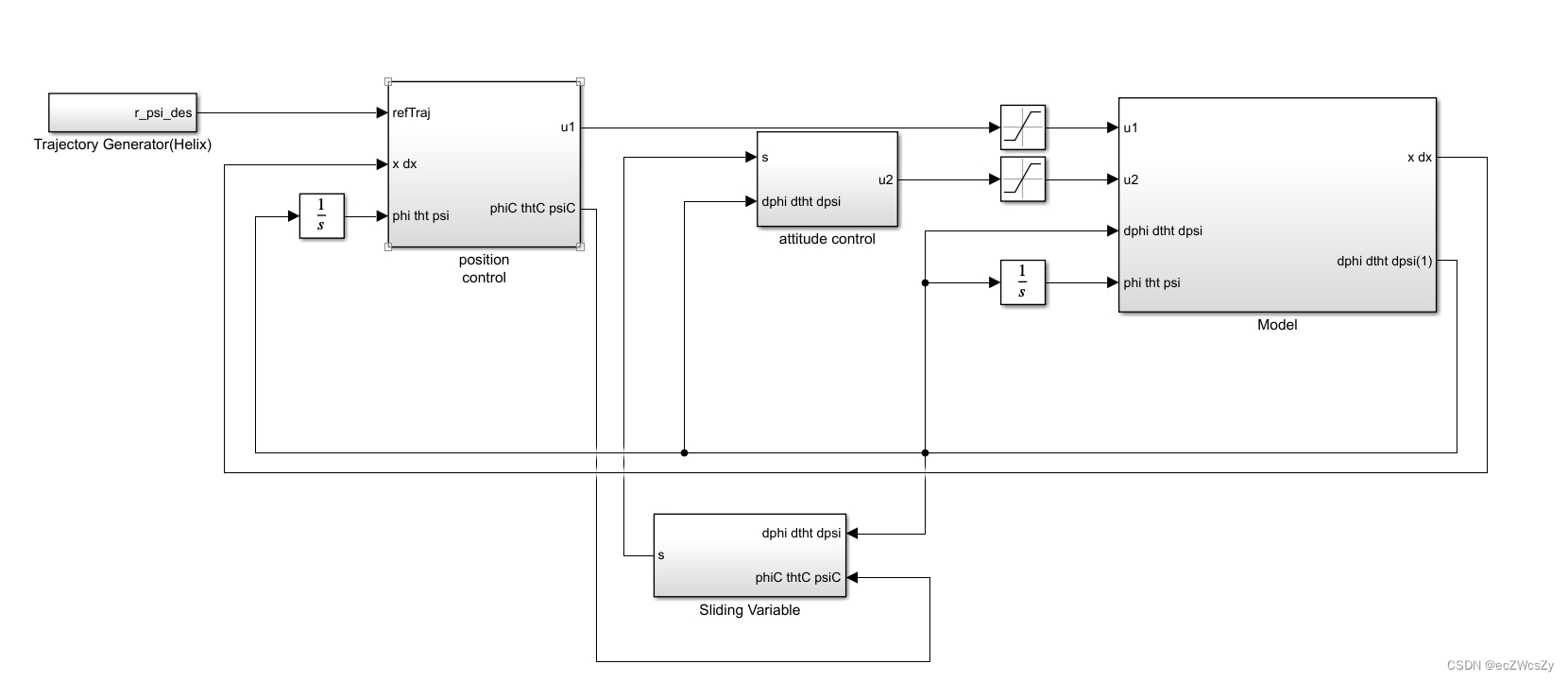
首先,我们先来介绍一下MATLAB在四旋翼仿真方面的应用。MATLAB作为一个强大的数学计算软件,提供了丰富的仿真模块,其中包括Simulink。通过搭建四旋翼模型,并利用Simulink进行仿真,我们可以快速、准确地评估不同控制算法的性能,从而选择最优的控制方案。在Simulink中,我们可以建立多种不同的控制器模型,并在仿真中进行对比分析,帮助我们理解各种控制方法的优劣之处。
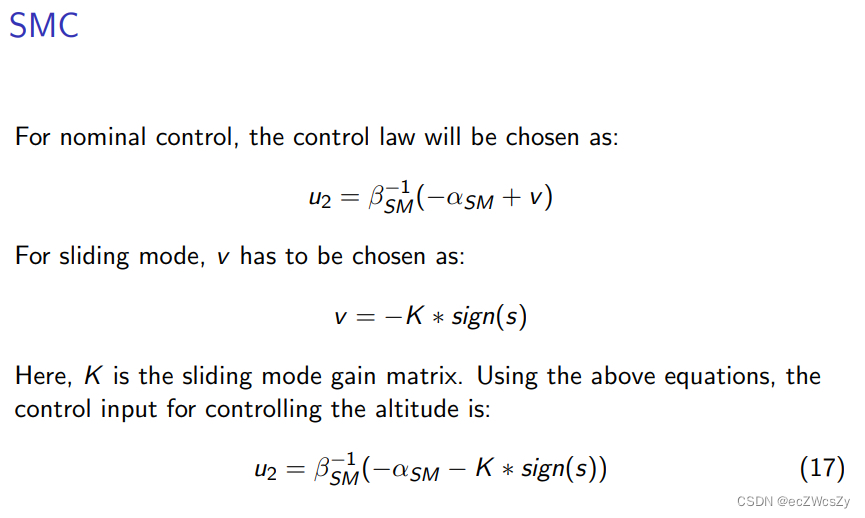
接下来,我们将重点关注滑模控制(Sliding Mode Control,SMC),这是一种常用于无人机控制的非线性控制方法。滑模控制的核心思想是通过引入滑模面,将系统状态引导到该滑模面上,从而实现对系统的控制。滑模控制具有很强的鲁棒性和非线性补偿能力,适用于各种环境条件和飞行姿态的控制。在滑模控制中,我们可以根据具体的需求选择不同的滑模面和滑模控制律,从而实现不同的飞行控制效果。
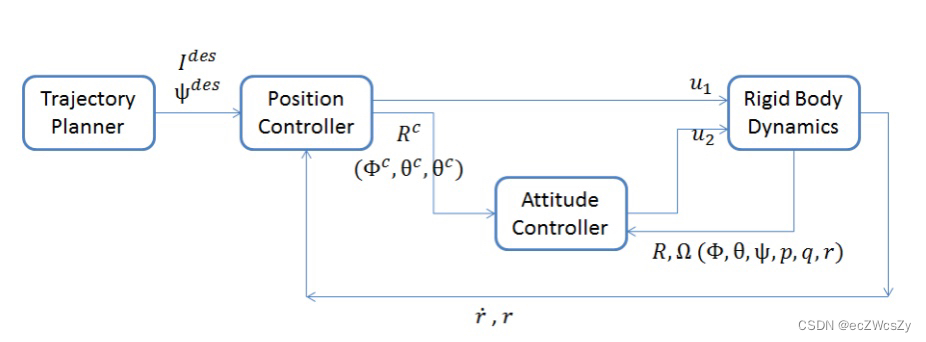
除了滑模控制,本文还介绍了另外两种常见的控制方法:反步控制(Backstepping Control)和PID控制。反步控制是一种基于反馈线性化的控制方法,它通过逐步构造一个反馈控制器,将非线性系统转化为等效的线性系统,从而实现对系统的控制。反步控制具有较好的控制精度和稳定性,但对系统建模和参数选择要求较高。PID控制是一种经典的线性控制方法,它通过调整比例、积分和微分三个控制参数,实现对系统的控制。PID控制简单易实现,但在非线性系统和复杂环境下的控制效果可能不理想。
综上所述,滑模控制、反步控制和PID控制是三种常见的四旋翼飞行器控制方法。滑模控制具有较好的鲁棒性和非线性补偿能力,适用于各种环境条件和飞行姿态的控制。反步控制通过反馈线性化将非线性系统转化为等效的线性系统进行控制。PID控制是一种经典的线性控制方法,简单易实现,但在复杂环境下的控制效果可能不理想。通过MATLAB四旋翼仿真,我们可以对这三种控制方法进行对比分析,选择最合适的控制方案。
总结起来,本文围绕MATLAB四旋翼仿真和滑模控制展开讨论,介绍了滑模控制、反步控制和PID控制三种常见的控制方法。通过仿真实验和性能评估,我们可以选择最优的控制方案,提高四旋翼飞行器的飞行性能和稳定性。希望本文能够对程序员社区的读者们在无人机控制方面有所启发,并提供有价值的技术分析和实践经验。
相关代码,程序地址:http://lanzouw.top/668605618037.html















 1016
1016











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









