






 本文介绍了一种基于改进滑模控制的光伏系统MPPT控制策略,强调其在光照变化和噪声环境中的优势,通过仿真模型展示了在不同条件下的输出波形。
本文介绍了一种基于改进滑模控制的光伏系统MPPT控制策略,强调其在光照变化和噪声环境中的优势,通过仿真模型展示了在不同条件下的输出波形。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
参考文献:
基于改进滑模控制的光伏系统MPPT控制策略是一种用于提高光伏系统最大功率点跟踪(MPPT)性能的控制方法。传统的MPPT控制方法通常使用模糊控制、比例积分控制或扰动观测控制等技术,但这些方法在光照强度变化大或者存在噪声干扰时性能较差。
改进滑模控制是一种具有强鲁棒性和快速响应的控制方法,可以有效解决光伏系统MPPT控制中的抖动问题和噪声干扰问题。其基本思想是通过引入滑模面和滑模控制律,使得系统状态能够快速地滑动到滑模面上并保持在滑模面上,从而实现对系统的控制。
具体而言,基于改进滑模控制的光伏系统MPPT控制策略可以分为以下几个步骤:
1. 设计滑模面:根据光伏系统的特性和MPPT控制目标,设计一个滑模面,使得系统状态能够在滑模面上滑动。
2. 设计滑模控制律:根据滑模面的设计,设计一个滑模控制律,通过调节控制参数来实现系统状态的滑动。
3. 实施滑模控制:将设计好的滑模控制律应用到光伏系统中,实施MPPT控制。在系统运行过程中,根据当前光照强度和电池电压等信息,计算出控制信号,控制光伏系统工作在最大功率点附近。
4. 跟踪最大功率点:根据控制信号的调节,使得光伏系统能够跟踪光照强度变化而调整工作点,使得系统输出功率最大化。
通过基于改进滑模控制的光伏系统MPPT控制策略,可以提高光伏系统在光照强度变化和噪声干扰下的MPPT性能,提高系统的能量转换效率。
📚2 运行结果
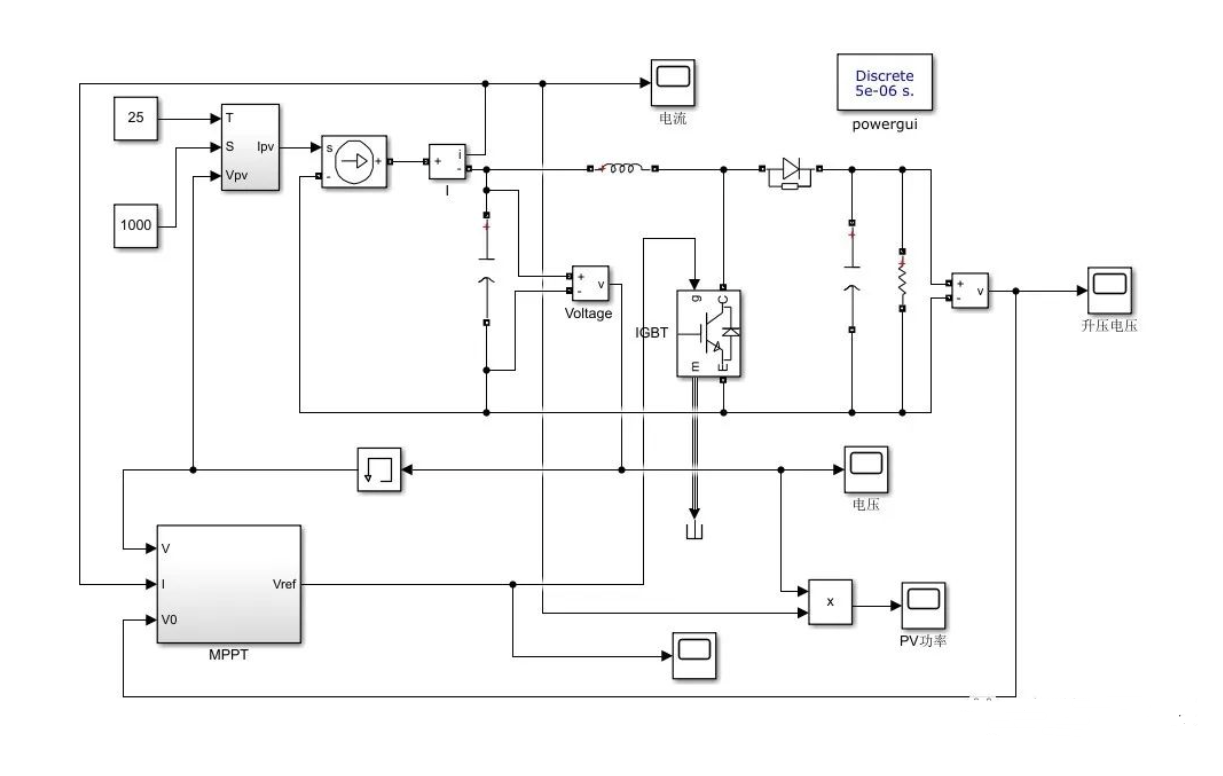
2.1 仿真模型搭建
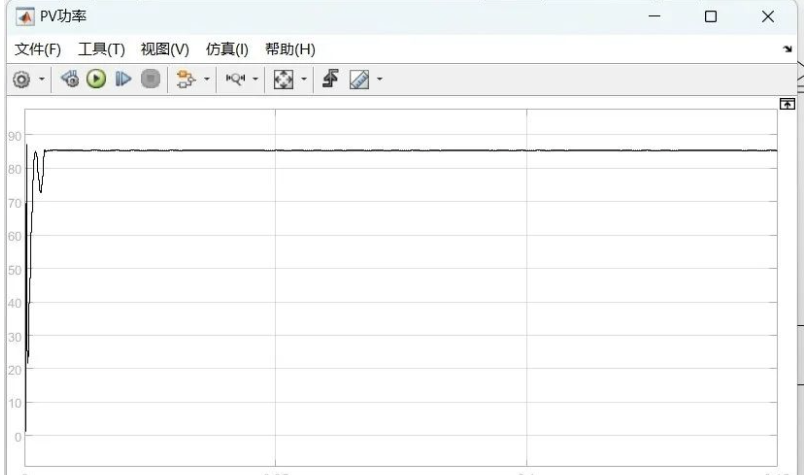
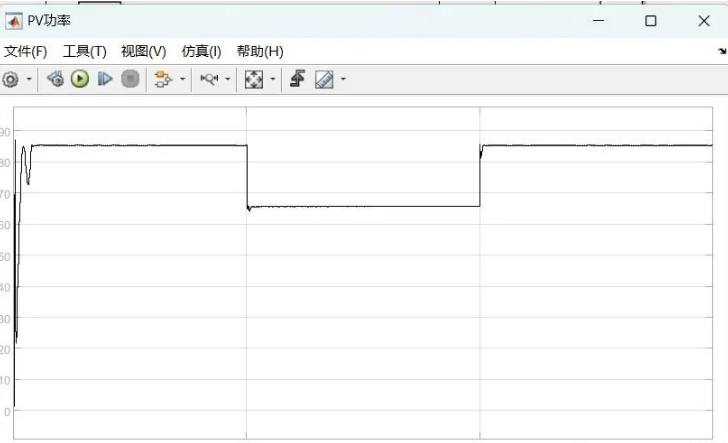
2.1 输出波形
当S=1000 W/m2,T分别在0.05、0.10 s 从25℃变换到60 ℃,再变到25℃时的仿真波形。

在T=25 C,S分别从0.05、0.10的1000 W/m2变到800W/m2,再变到1000 W/m2的仿真波形。
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]邵文权,王猛,吴朝俊等.基于改进滑模控制的光伏系统MPPT控制策略[J].太阳能学报,2021,42(10):87-93.DOI:10.19912/j.0254-0096.tynxb.2019-1098.


















 1802
1802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









