







V90伺服内部设定值位置控制模式(IPos)的Modbus控制流程
1、6. SINAMICS V90 PTI 操作说明.pdf - p287 - Modbus 通信
| 参数 | 设定值 | 生效 | 功能描述 |
|---|---|---|---|
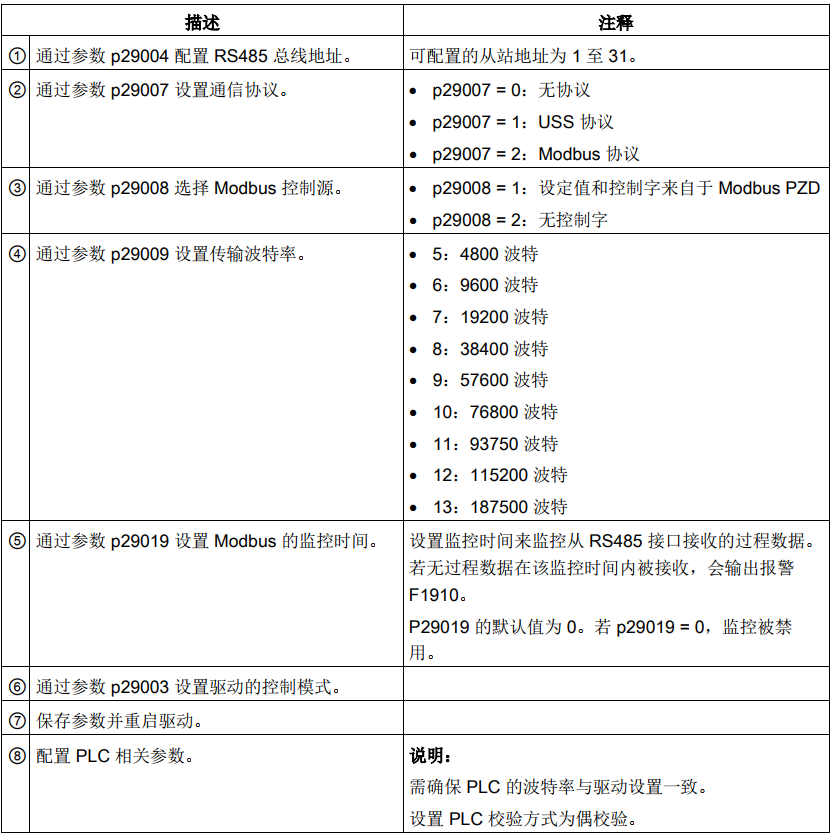
| P29004 | 1 | RE | 设置通讯从站地址(1) |
| P29007 | 2 | RE | 设置通讯协议类型(Modbus 协议) |
| P29008 | 2 | RE | 选择 Modbus 控制源 |
| P29009 | 6 | RE | 设置通讯波特率(9600) |
2、6. SINAMICS V90 PTI 操作说明.pdf - p137 - 直接信号映射
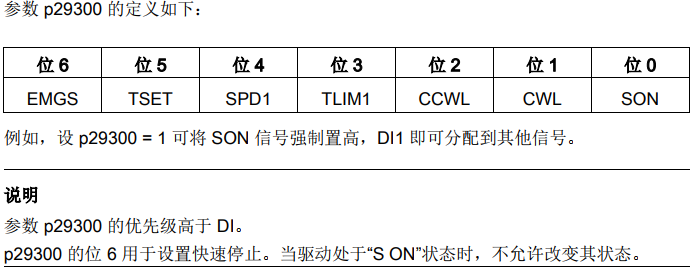
为确保正常运行,数字量信号 CWL、CCWL 和 EMGS 必须保持在高电平(1),通过设置参数 p29300(P_DI_Mat)可将下列六个信号强制置高(逻辑“1”)
| 参数 | 设定值 | 生效 | 功能描述 |
|---|---|---|---|
| P29300 | 46 | IM | CWL、CCWL 和 EMGS一直强制高电平 |
3、6. SINAMICS V90 PTI 操作说明.pdf - p197 - 检查伺服电机类型
- 可自动检测,不能再参见手册配置;
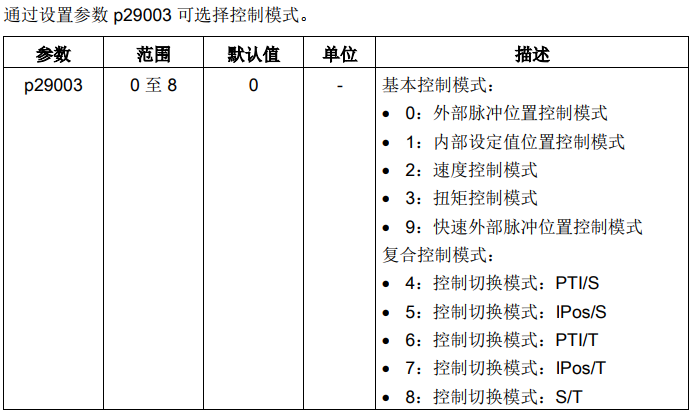
4、6. SINAMICS V90 PTI 操作说明.pdf - p225 - 选择控制模式
| 参数 | 设定值 | 生效 | 功能描述 |
|---|---|---|---|
| P29003 | 1 | RE | 内部设定值位置控制模式(IPos) |
5、参数保存:保存参数并重启伺服驱动
6、6. SINAMICS V90 PTI 操作说明.pdf - p253 - 设置机械系统
通过参数设置机械 齿轮比
批注1: 如果 p29247 的值增加 N 倍,则 p2542、p2544 和 p2546 的值也增加 N 倍。否则,产生 故障 F7450 和 F7452。(我发现伺服驱动内
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









