







- 基于c/c++的编程方法
- 支持异构编程的扩展方法
- 简单明了的apis,能够轻松的管理存储系统
cuda支持的编程语言:c/c++/python/fortran/java…
1、CUDA并行计算基础
- 异构计算
- CUDA 安装
- CUDA 程序的编写
- CUDA 程序编译
- 利用NVProf查看程序执行情况
gpu不是单独的在计算机中完成任务,而是通过协助cpu和整个系统完成计算机任务,把一部分代码和更多的计算任务放到gpu上处理,逻辑控制、变量处理以及数据预处理等等放在cpu上处理。
host 指的是cpu和内存
device 指的是gpu和显存
nvidia-smi 查看当前gpu的运行状态
2、第一个cuda程序
系统中安装了cuda但是执行nvcc找不到命令。
添加环境变量。
vim ~/.bashrc
加入环境变量
export PATH="/usr/local/cuda-10.2/bin:$PATH"
export LD_LIBRARY_PATH="/usr/local/cuda-10.2/lib64:$LD_LIBRARY_PATH"
source ~/.bashrc
再次执行nvcc -V结果如下。

2.1 helloword
nvcc也可以支持纯c的代码,所以先写一个helloword的代码进行,使用nvcc进行编译!
cuda程序的编译器驱动nvcc支持编译纯粹的c++代码,一个标准的CUDA程序中既有C++代码也有不属于C++的cuda代码。cuda程序的编译器驱动nvcc在编译一个cuda程序时,会将纯粹的c++代码交给c++的编译器,他自己负责编译剩下的部分(cuda)代码。
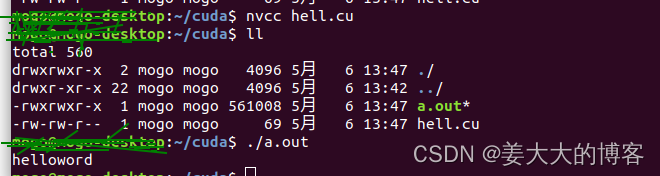
创建hell.cu文件,cuda的代码需要以cu为后缀结尾。
#include<stdio.h>
int main()
{
printf("helloword\n");
return 0;
}
~
nvcc hell.cu
./a.out
运行结果如下。
2.2 核函数
cuda 中的核函数与c++中的函数是类似的,cuda的核函数必须被限定词__global__修饰,核函数的返回类型必须是空类型,即void.
#include<stdio.h>
__global__ void hello_from_gpu()
{
printf("hello word from the gpu!\n");
}
int main()
{
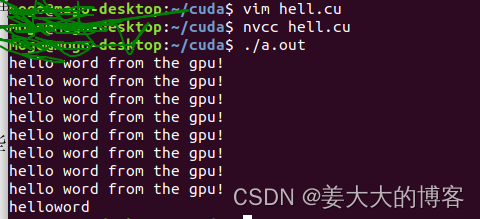
hello_from_gpu<<<1,1>>>();
cudaDeviceSynchronize();
printf("helloword\n");
return 0;
}
~
运行结果如下。

在核函数的调用格式上与普通C++的调用不同,调用核函数的函数名和()之间有一对三括号,里面有逗号隔开的两个数字。因为一个GPU中有很多计算核心,可以支持很多个线程。主机在调用一个核函数时,必须指明需要在设备中指派多少个线程,否则设备不知道怎么工作。三括号里面的数就是用来指明核函数中的线程数以及排列情况的。核函数中的线程常组织为若干线程块(thread block)。
三括号中的第一个数时线程块的个数,第二个数可以看作每个线程中的线程数。一个核函数的全部线程块构成一个网格,而线程块的个数记为网格大小,每个线程块中含有同样数目的线程,该数目称为线程块大小。所以核函数中的总的线程就等与网格大小乘以线程块大小,即<<<网格大小,线程块大小 >>>
核函数中的printf函数的使用方法和C++库中的printf函数的使用方法基本上是一样的,而在核函数中使用printf函数时也需要包含头文件<stdio.h>,核函数中不支持C++的iostream。
cudaDeviceSynchronize();这条语句调用了CUDA运行时的API函数,去掉这个函数就打印不出字符了。因为cuda调用输出函数时,输出流是先放在缓存区的,而这个缓存区不会核会自动刷新,只有程序遇到某种同步操作时缓存区才会刷新。这个函数的作用就是同步主机与设备,所以能够促进缓存区刷新。
3、cuda中的线程组织
3.1 使用多个线程的核函数
核函数中允许指派很多线程,一个GPU往往有几千个计算核心,而总的线程数必须至少等与计算核心数时才有可能充分利用GPU的全部计算资源。实际上,总的线程数大于计算核心数时才能更充分地利用GPU中的计算资源,因为这会让计算和内存访问之间及不同的计算之间合理地重叠,从而减小计算核心空闲的时间。
使用网格数为2,线程块大小为4的计算核心,所以总的线程数就是2x4=8,所以核函数的调用将指派8个线程完成。
核函数中的代码的执行方式是“单指令-多线程”,即每一个线程都执行同一指令的内容。
#include<stdio.h>
__global__ void hello_from_gpu()
{
printf("hello word from the gpu!\n");
}
int main()
{
hello_from_gpu<<<2,4>>>();
cudaDeviceSynchronize();
printf("helloword\n");
return 0;
}
运行结果如下。
3.2 线程索引的使用
一个核函数可以指派多个线程,而这些线程的组织结构是由执行配置(<<<网格大小,线程块大小 >>>)来决定的,这是的网格大小和线程块大小一般来说是一个结构体类型的变量,也可以是一个普通的整形变量。
一个核函数允许指派的线程数是巨大的,能够满足几乎所有应用程序的要求。但是一个核函数中虽然可以指派如此巨大数目的线程数,但在执行时能够同时活跃(不活跃的线程处于等待状态)的线程数是由硬件(主要是CUDA核心数)和软件(核函数的函数体)决定的。
每个线程在核函数中都有一个唯一的身份标识。由于我们在三括号中使用了两个参数制定了线程的数目,所以线程的身份可以由两个参数确定。在程序内部,程序是知道执行配置参数grid_size和block_size的值的,这两个值分别保存在内建变量(built-in vari-
able)中。
gridDim.x :该变量的数值等与执行配置中变量grid_size的数值。
blockDim.x: 该变量的数值等与执行配置中变量block_size的数值。
在核函数中预定义了如下标识线程的内建变量:
blockIdx.x :该变量指定一个线程在一个网格中的线程块指标。其取值范围是从0到gridDim.x-1
threadIdx.x:该变量指定一个线程在一个线程块中的线程指标,其取值范围是从0到blockDim.x-1
代码如下。
#include<stdio.h>
__global__ void hello_from_gpu()
{
const int bid = blockIdx.x;
const int tid = threadIdx.x;
printf("hello word from block %d and thread %d\n",bid,tid);
}
int main()
{
hello_from_gpu<<<2,4>>>();
cudaDeviceSynchronize();
printf("helloword\n");
return 0;
}
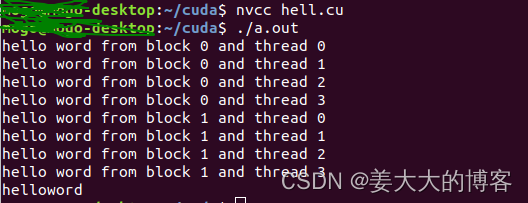
有时候线程块的顺序会发生改变,有时候是第1个先执行有时候是第0个先执行,这说明了cuda程序执行时每个线程块的计算都是相互独立的,不管完成计算的次序如何,每个线程块中间的每个线程都进行一次计算。
3.3 cuda多维网格
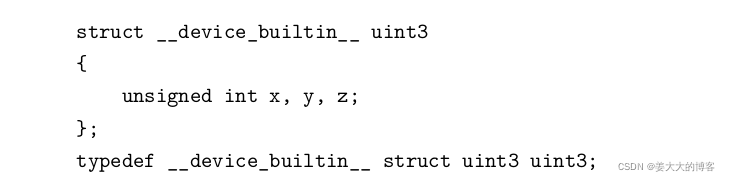
上述四个内建变量都使用了C++中的结构体或者类的成员变量的语法,其中blockIdx和threadIdx是类型为uint3的变量,该类型是一个结构体,具有x,y,z三个成员变量。所以blockIdx只是三个成员中的一个,threadIdx也有xyz三个成员变量。结构体uint3在头文件vector_types.h中定义有。
 同样的gridDim和blockDim是dim3类型的变量。也有xyz三个成员变量。
同样的gridDim和blockDim是dim3类型的变量。也有xyz三个成员变量。
在前面三括号内的网格大小和线程块大小都是通过一维表示,可以通过dim3定义多维网格和线程块,通过C++的构造函数的方法实现。di3 grid_size(Gx.Gy,Gz);
如果第三个维度是1,可以省去不写。
多维的网格和线程块本质上还是一维的,就像多维数组本质上也是一维数组一样。一个多维线程指标threadIdx.x、threadIdx.y、threadIdx.z对应的一维指标为。
int tid = threadIdx.z * blockDim.x * blockDim.y +threadIdx.y * blockDim.x + threadIdx.x;
也就是说,x维度是最内层的变化最快的,而z维度是最外层的变化最满的。
代码如下。
#include<stdio.h>
__global__ void hello_from_gpu()
{
const int bid = blockIdx.x;
const int tid = threadIdx.x;
const int yid = threadIdx.y;
printf("hello word from block %d and thread (%d,%d)\n",bid,tid,yid);
}
int main()
{
const dim3 block_size(2,4);
hello_from_gpu<<<1,block_size>>>();
cudaDeviceSynchronize();
printf("helloword\n");
return 0;
}
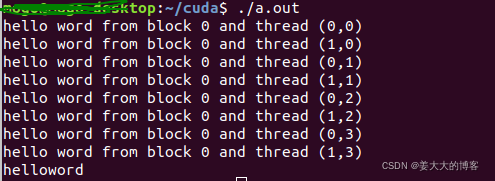
因为线程块的大小是2*4,所以在核函数中,blockDim.x的值为2,blokcDim.y值是4,threadIdx.x的取值是0到1,threadIdx.y的取值是0到3。
从结果可以看到。x维度是变量最快的是最内层的,是因为结果中,前两行的x层发生了0-1的转变,但是y层依然表示0。
3.3 网格与线程块大小的限制
cuda中对能够定义的网格大小和线程块大小做了限制,一个线程块最多只能有1024个线程。
4 cuda中的头文件
cuda有自己的头文件,但是在使用nvcc编译器驱动.cu文件时,将自动包含必要的cuda头文件,如<cuda.h>个和<cuda_runtime.h>。因为<cuda.h>包含了<stdlib.h>,所以在使用nvcc编译的cuda程序也不需要包含stdlib头文件。
5 nvcc编译cuda程序
cuda的编译器驱动nvcc会先将全部源代码分离为主机代码和设备代码。设备代码完全支持C++语法,但设备代码只部分地支持C++。nvcc先将设备代码编译为PTX伪汇编代码,再将PTX代码编译为二进制的文件cubin目标代码。在将源代码编译为PTX代码时,需要用选项-arch=compute_XY指定一个虚拟架构的计算能力,用以确定代码中共能够使用的cuda功能。在将PTX代码编译为cubin代码时,需要用选项-code=sm_ZW指定一个真实架构的计算能力,用以确定可执行文件能够使用的GPU。真实架构的计算能力必须等与或者大于虚拟架构的计算能力。
















 2437
2437











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











