







引子
PWM算是除了按键、LED和LCD这些必考模块以外最重要的部分了,基本每次题目都会或多或少的要求输出或捕获PWM。这里大致分为四种 :
1、一路或两路特定频率特定占空比或占空比可调PWM(PWM输出即可)
2、同一定时器输出两路频率不同或单独可调,占空比恒定或可调(PWM输出比较)
3、一路PWM捕获(PWM捕获即可)
4、两路PWM捕获(输入捕获)
这篇只介绍前两种
情况1代码简单,不需要添加中断服务函数在库函数基础上不怎么需要修改
情况2也能实现情况1但是要复杂些
输出比较原理推荐
https://blog.csdn.net/lblmlms/article/details/89391144
B站野火的视频也可以参考下
PWM输出驱动编写
参考STM32固件库代码V3.5版\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples\TIM\PWM_Output
题目一般最多要求两路,这里使用的是定时器3的通道1和2,也可以使用定时器2、3、4
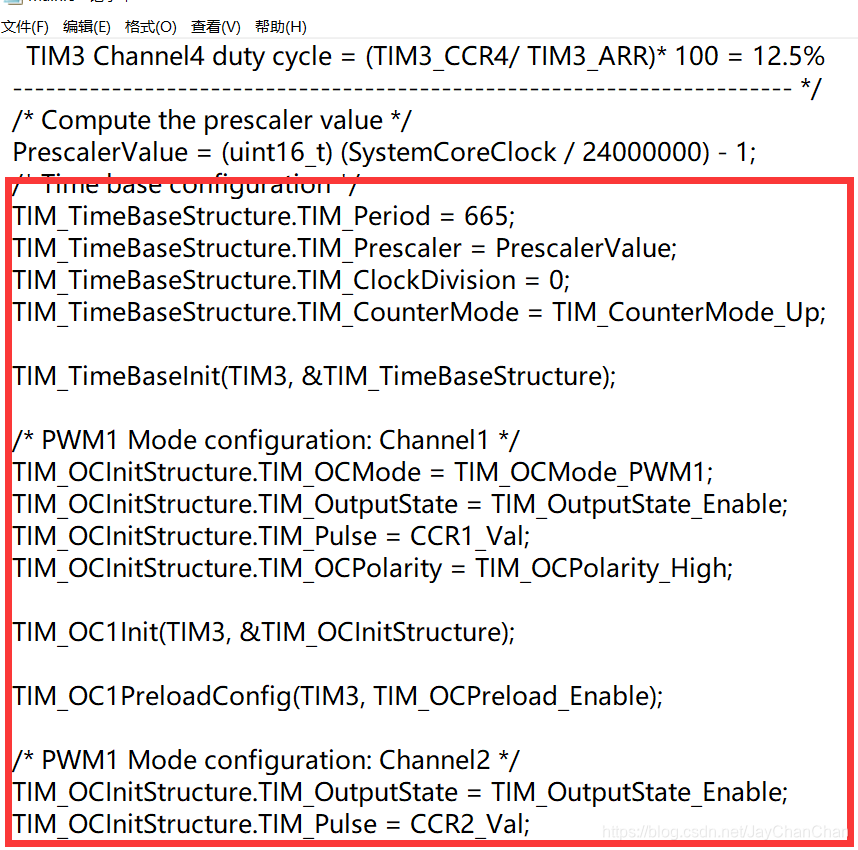
使用直接在main.初始化以后调用TIM_SetCompareX()函数即可,注意输出PWM频率计算=72M / period/ prescaler
代码
#include "pwm.h"
void PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
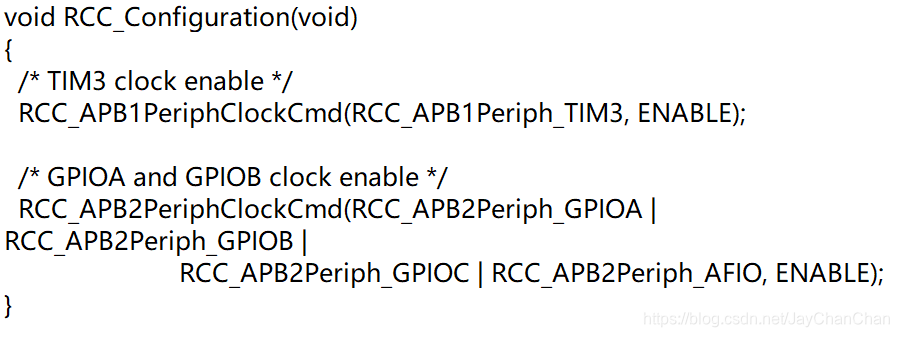
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3|RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //72M/72/1K=1K
TIM_TimeBaseStructure.TIM_Prescaler = psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
PWM输出比较
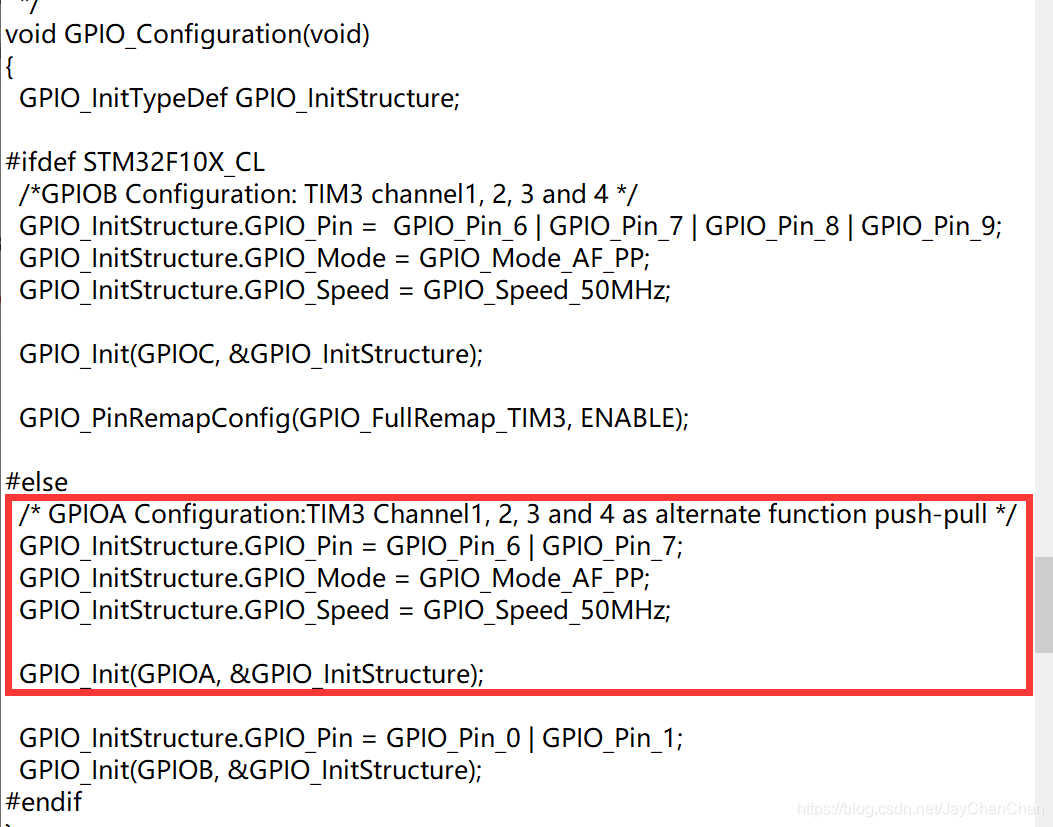
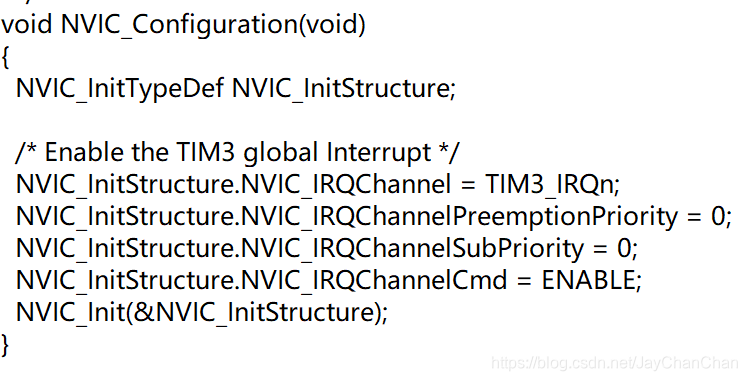
参考STM32固件库代码V3.5版\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples\TIM\OCToggle main.c和stm32f10x_it.c
TIM_TimeBase下面全部需要复制
时钟配置、IO配置、中断配置
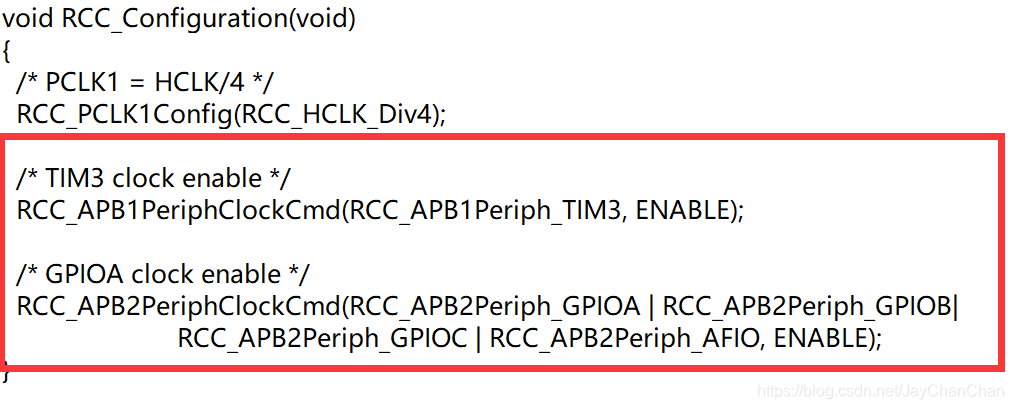
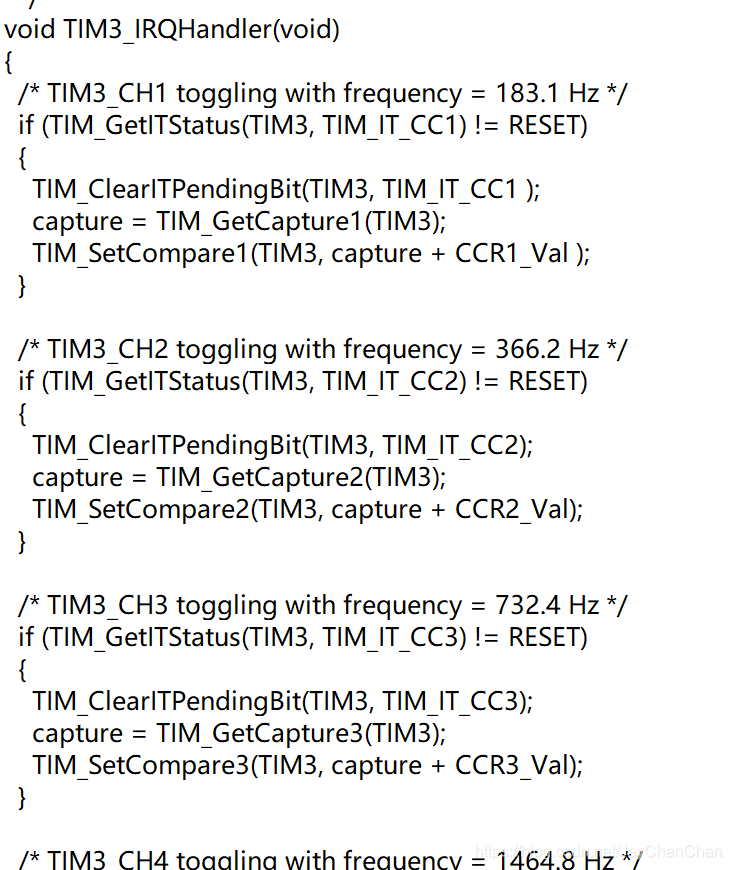
中断服务函数
代码
#include "pwm.h"
__IO uint16_t CCR1_Val;
__IO uint16_t CCR2_Val;
u8 ch1_f,ch2_f;
uint16_t capture = 0;
void PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
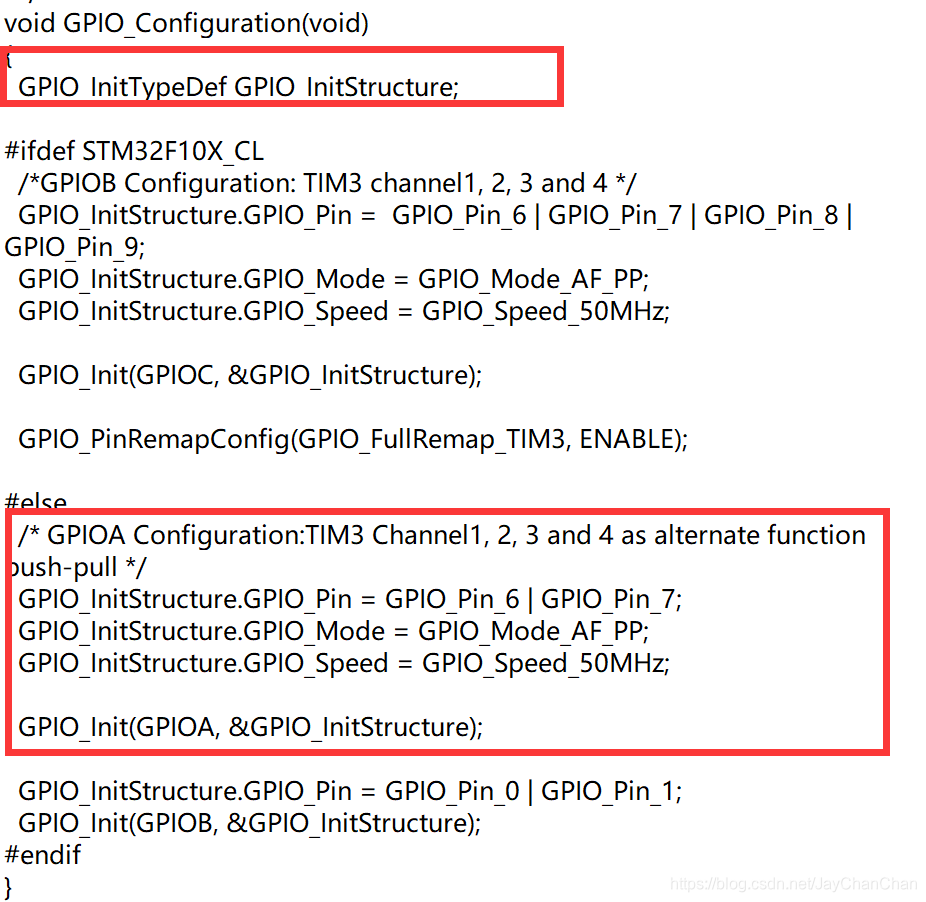
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
CCR1_Val=1000000/(CH1_Fre*1000);
CCR2_Val=1000000/(CH2_Fre*1000);
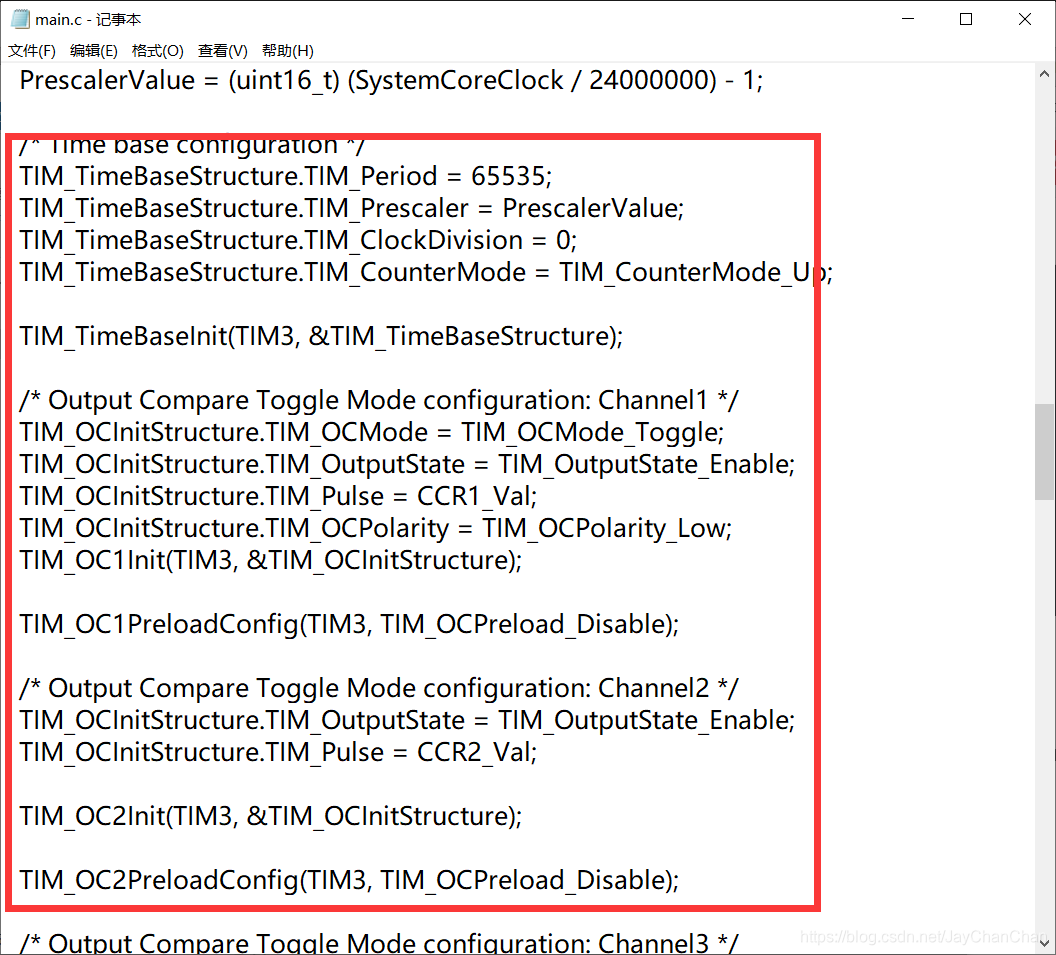
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Disable);
/* Output Compare Toggle Mode configuration: Channel2 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR2_Val;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Disable);
TIM_Cmd(TIM3, ENABLE);
TIM_ITConfig(TIM3, TIM_IT_CC1 | TIM_IT_CC2, ENABLE);
}
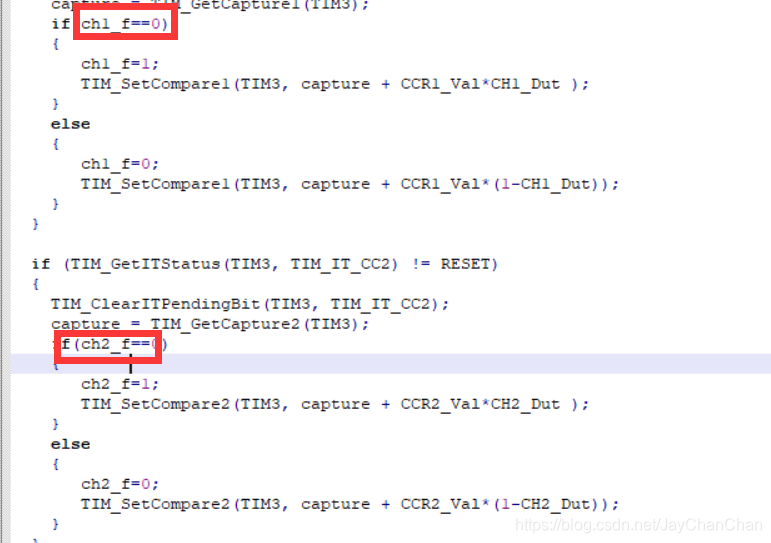
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC1 );
capture = TIM_GetCapture1(TIM3);
if(ch1_f==0)
{
ch1_f=1;
TIM_SetCompare1(TIM3, capture + CCR1_Val*CH1_Dut );
}
else
{
ch1_f=0;
TIM_SetCompare1(TIM3, capture + CCR1_Val*(1-CH1_Dut));
}
}
if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);
capture = TIM_GetCapture2(TIM3);
if(ch2_f==0)
{
ch2_f=1;
TIM_SetCompare2(TIM3, capture + CCR2_Val*CH2_Dut );
}
else
{
ch2_f=0;
TIM_SetCompare2(TIM3, capture + CCR2_Val*(1-CH2_Dut));
}
}
}
问题
PWM输出其实相对还是比较简单的,输出比较掌握了原理以后理解起来就不那么难了。这部分可能需要注意下输出频率计算的问题。
之前遇到的一个问题:
输出比较能输出两路PWM但是波形异常,频率低的那一路PWM还叠加了高频的PWM。后来发现是中断服务函数内两个通道共用了一个标志位导致。改成每通道各自用一个标志位即可。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









