







 本文介绍了移动机器人控制的基础知识,包括控制理论的基本概念,如系统、控制、状态和输入等,并探讨了如何选择合适的控制信号u。文章还详细讲解了动力学模型,特别是巡航控制的实现,以及控制调节中的比例(P)、积分(I)和微分(D)控制策略,为理解PID控制奠定了基础。
本文介绍了移动机器人控制的基础知识,包括控制理论的基本概念,如系统、控制、状态和输入等,并探讨了如何选择合适的控制信号u。文章还详细讲解了动力学模型,特别是巡航控制的实现,以及控制调节中的比例(P)、积分(I)和微分(D)控制策略,为理解PID控制奠定了基础。
前言
学习ROS的时候,由于之前对控制的概念、机器人坐标的变换、里程数的计量、马达的运转等完全没有什么概念,感觉像是掉进了一个大坑,于是找了一些相关课程进行学习,本系列博文就是对学习的一个梳理,愿有始有终!
课程概括
主要内容
- 控制理论
- 机器人模型
- 移动控制
控制理论
基本概念
- 系统:随时间改变的一些东西(机器人、股票、电路等)
- 控制:能影响系统变化的(加速度、操盘手、电压变化等)
- 状态:呈现系统现在正在做什么 符号 x
- 动态:描述系统怎样去变化
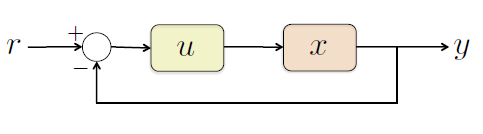
x˙ - 参照:我们想要这个系统做什么 r
- 输出:对系统的测量
y - 输入:控制信号 u
- 反馈:从输出到输入的映射
基本反馈图
怎样选择
u
- 稳定性
- 可追踪
- 鲁棒性
- 抗干扰性
- 最优性
动力学模型
有效的控制策略依赖于可以预见的模型,这一点很关键,可以帮助你从宏观上把握一个系统。
分类(都是依据时间来划分)
- 连续模型
- 离散模型
巡航控制
巡航就是让车以固定速度移动,主要的控制点在于使其加速度为零。
1. 状态:主要参考的是车的速度,当然车的坐标和角度也可以当做参考。 x
2. 输入:就是你控制油门的力道
u
了。 F=cu ,其中 c 是一个转换系数。
3. 动态:也就是加速度了
x˙
,动态方程对系统状态起到实际控制作用
x
1. 状态:主要参考的是车的速度,当然车的坐标和角度也可以当做参考。 x
2. 输入:就是你控制油门的力道
3. 动态:也就是加速度了
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1006
1006

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









