






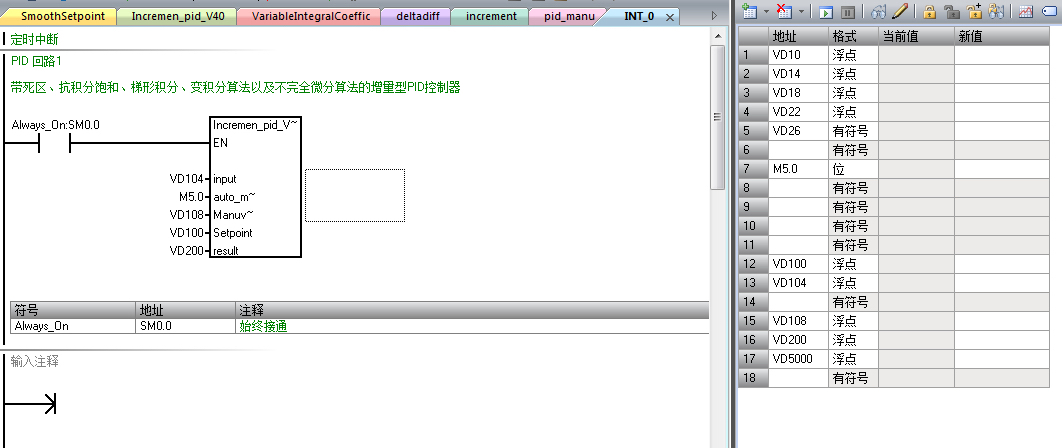
带死区、抗积分饱和、梯形积分、变积分算法以及不完全微分算法的增量型PID控制器。
ID:2999671389001261
工控博士
增量型PID控制器是一种常用的控制器类型,其主要应用于工业自动化领域。在现实中的许多控制系统中,往往存在着一些特殊的需求,例如对于系统存在的死区、积分饱和以及变积分算法的变化等情况需要进行特殊处理。本文将围绕这些特殊需求展开讨论,介绍带死区、抗积分饱和、梯形积分、变积分算法以及不完全微分算法的增量型PID控制器。
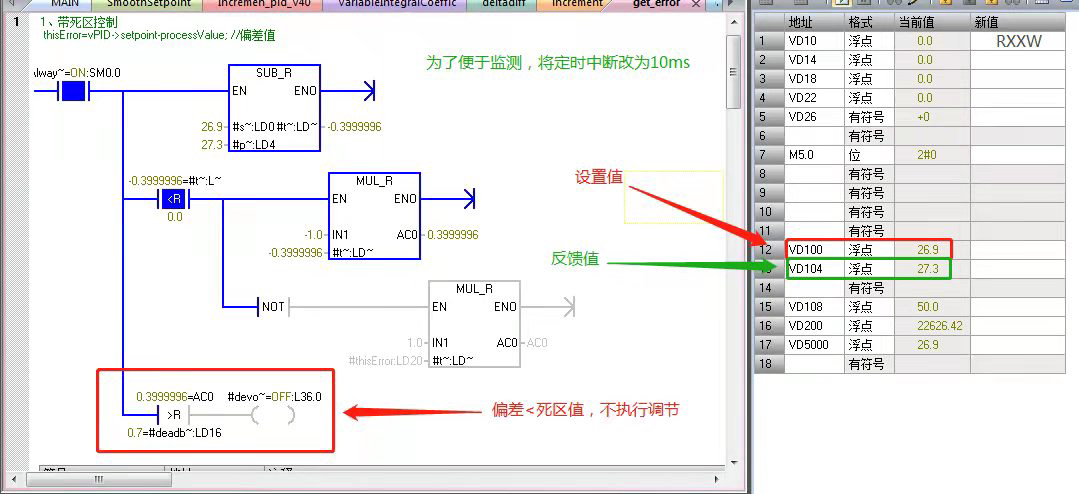
首先,带死区的增量型PID控制器是为了解决系统存在的死区问题而设计的。死区是指系统输出在输入经过一定范围内时不发生变化的情况,这种情况下如果使用传统的PID控制器会导致系统无法达到预期的控制效果。因此,在增量型PID控制器中引入死区补偿机制,通过对输入信号进行修正,使得系统能够正确响应输入信号的变化,从而解决死区问题。
其次,抗积分饱和的增量型PID控制器是为了解决系统存在的积分饱和问题而设计的。积分饱和是指当系统输出饱和时,积分项会持续累积,导致系统响应过度,出现超调甚至不稳定的情况。为了应对这种情况,增量型PID控制器引入了抗积分饱和算法,通过对积分项进行限制或者抑制,有效地防止积分饱和问题的发生,从而提高系统的稳定性和鲁棒性。
第三,在增量型PID控制器中,还可以采用梯形积分算法。相比于传统的矩形积分算法,梯形积分算法具有更高的精度和稳定性。梯形积分算法通过对输入信号进行加权求和,以提高积分项对系统响应的贡献。在实际应用中,梯形积分算法常常结合死区补偿和抗积分饱和算法进行综合应用,以实现更好的控制效果。
此外,对于存在变积分算法的控制系统,增量型PID控制器也能够进行适应性调整。变积分算法是指根据系统的动态性能要求,在不同工作阶段采用不同的积分项计算方式。通过动态调整积分项的权重或者积分时间,增量型PID控制器可以在不同工况下实现更好的控制性能。
最后,不完全微分算法也是增量型PID控制器中的一种重要算法。传统的PID控制器中,微分项是根据系统输出的变化率进行计算的。但是,在实际应用中,系统的输出往往会受到噪声或者干扰的影响,导致微分项的计算不稳定。为了解决这个问题,不完全微分算法引入了滤波器或者变权重的方法,对微分项进行平滑处理,提高系统的抗干扰能力,同时保持了微分项对系统动态响应的贡献。
综上所述,带死区、抗积分饱和、梯形积分、变积分算法以及不完全微分算法是增量型PID控制器中常用的技术手段。通过对这些技术手段的理解和应用,可以更好地解决控制系统中存在的特殊问题,提高控制效果和系统的稳定性。在实际工程应用中,根据具体的控制需求和系统特性,可以灵活选择和组合这些技术手段,以实现最佳的控制效果。
相关的代码,程序地址如下:http://wekup.cn/671389001261.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









