






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
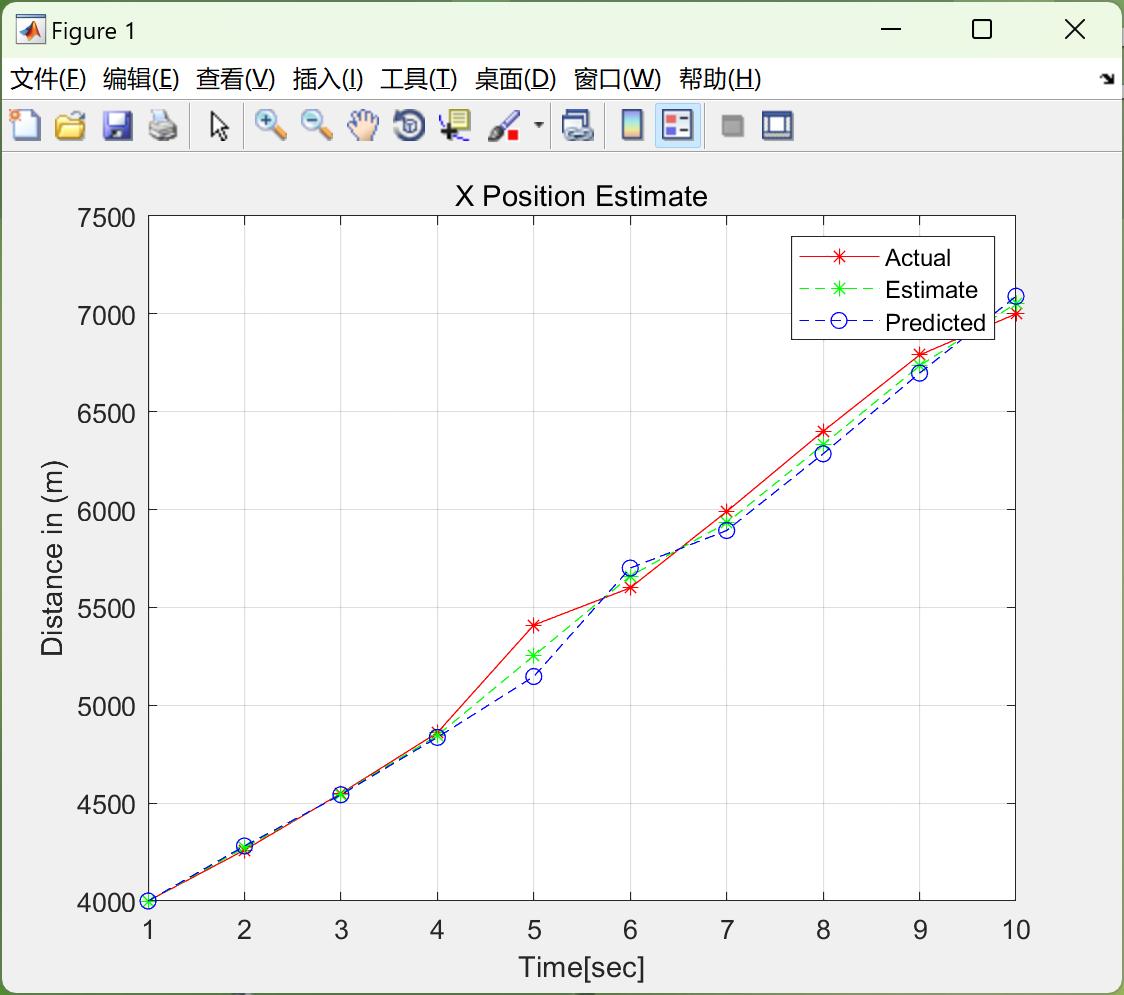
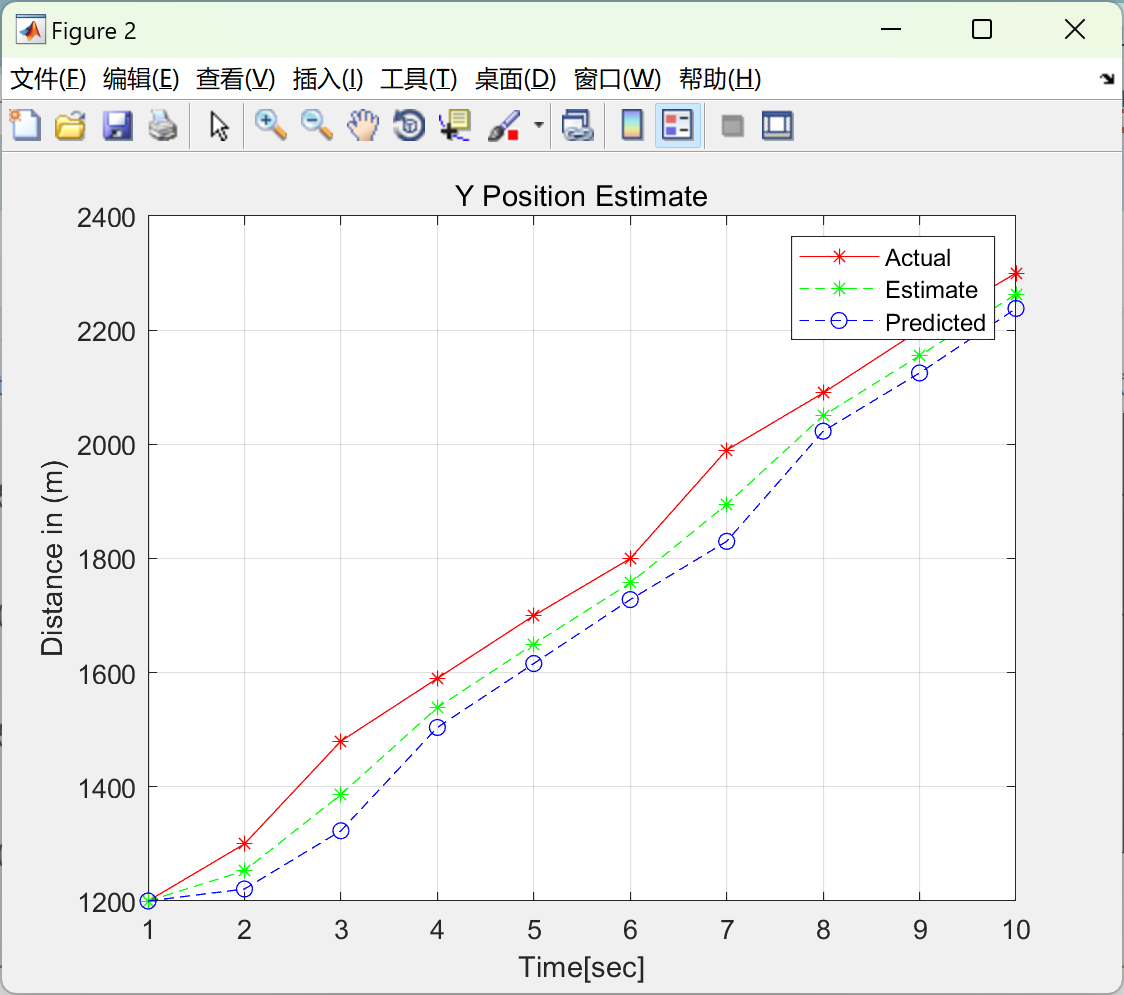
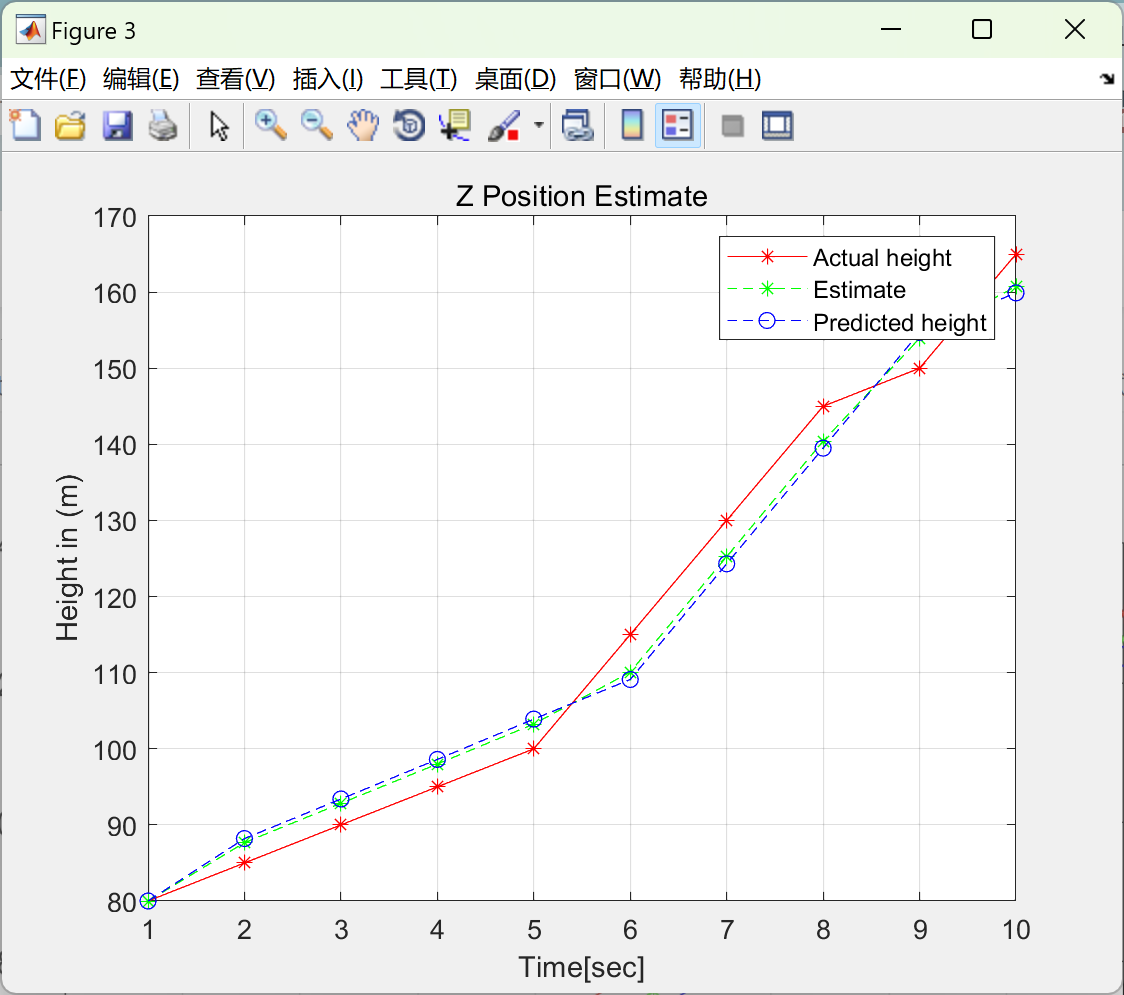
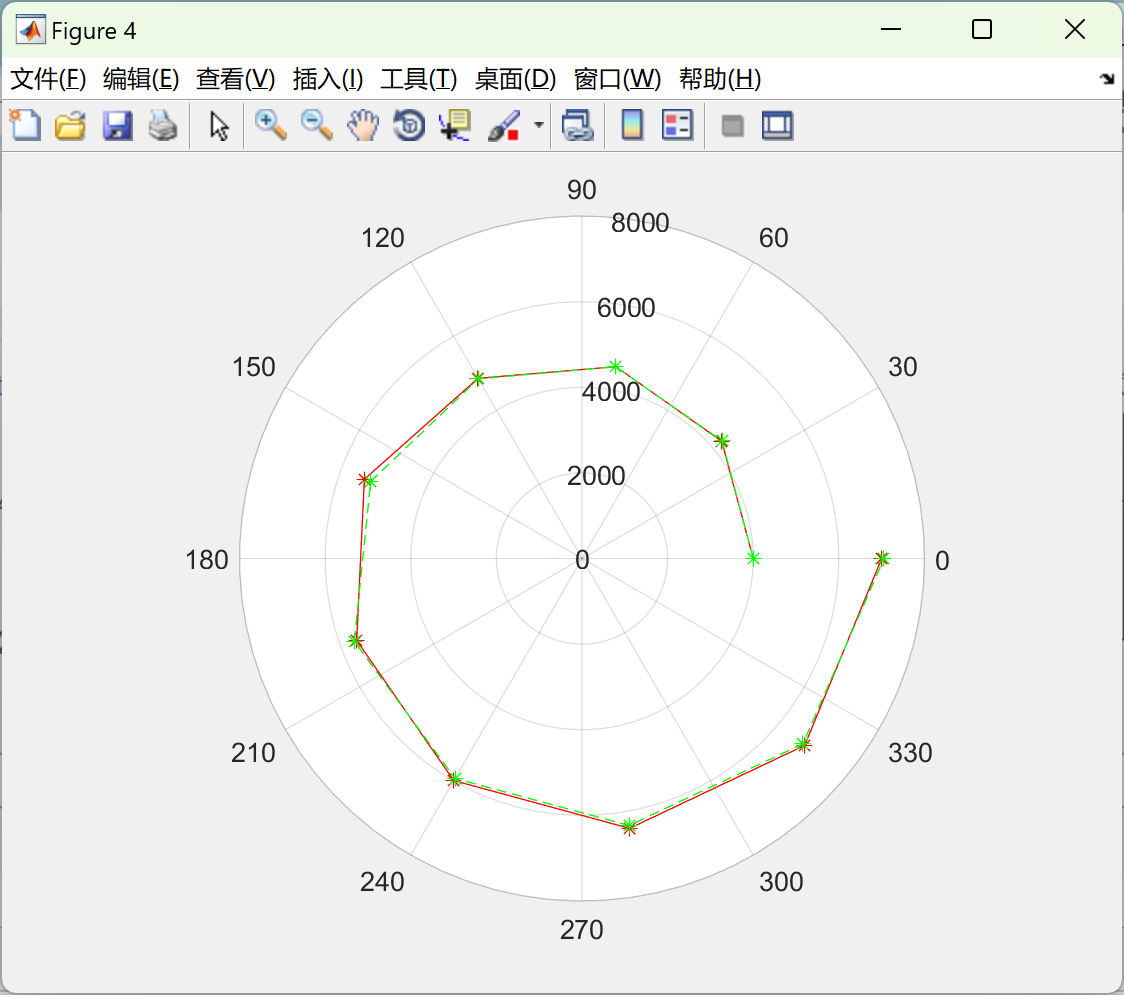
原始卡尔曼滤波是一种经典的状态估计技术,通常用于跟踪目标位置及其运动。在跟踪3D空间中的无人机时,原始卡尔曼滤波可用于估计无人机的位置和速度,并根据传感器测量和系统动力学模型进行校正和更新。该滤波器的基本思想是通过将预测值与观测值进行加权平均来提供对目标状态的最佳估计。在无人机路径规划中,原始卡尔曼滤波可以用来解决位置和速度估计的问题。通过结合惯性测量单元(IMU)和全球定位系统(GPS)等传感器数据,滤波器可以提供对无人机当前位置和速度的估计,从而实现精确的路径规划和导航。然而,原始卡尔曼滤波对于非线性系统和噪声模型的适应性有限,因此在实际应用中,可能需要使用扩展卡尔曼滤波或其他更复杂的滤波技术来处理更复杂的情况。
📚2 运行结果
主函数部分代码:
clc; close all;
%initial state
xo=25;
vox=2;
%Observations ****
% X-Direction Calculation:
X=[4000 4260 4550 4860 5410 5600 5990 6400 6790 7000 ]; %position-X
V=[ 280 282 285 286 290 292 294 296 299 302]; % Velocity in 'X' direction
%X = xlsread('DroneFlightTrace1.xlsx','R2:R700');
%V = 0.07 .*[X];
%Process Errors in Process Covaiance Matrix
del_px=20; %initial covariance matrix is choosen intuitively
del_pv=5;
%initial conditions
acc_x=2;
del_t=1;
vx=2;
del_x=25; %uncertainity in the measurement
%Observation Error
del_X=25;
del_VX=6;
Xk=[];
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]朱奇光,商健,刘博,等.基于无人机航拍视频车辆多目标跟踪算法研究[J/OL].计量学报:1-7[2024-04-27].http://kns.cnki.net/kcms/detail/11.1864.TB.20240419.0853.002.html.
[2]范云生,张凯,牛龙辉,等.海上无人机对运动船舶的长期检测跟踪算法[J/OL].仪器仪表学报:1-10[2024-04-27].http://kns.cnki.net/kcms/detail/11.2179.TH.20240324.1758.014.html.















 6807
6807

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









