









目录
1.程序功能描述
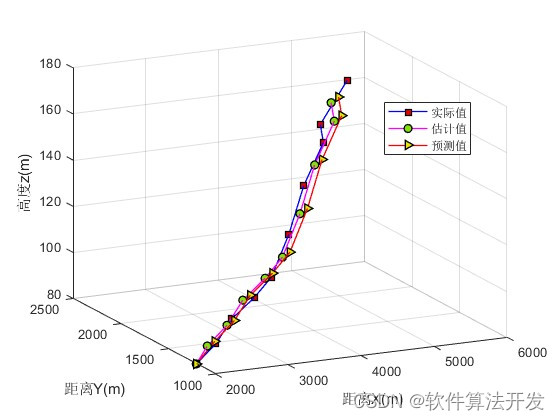
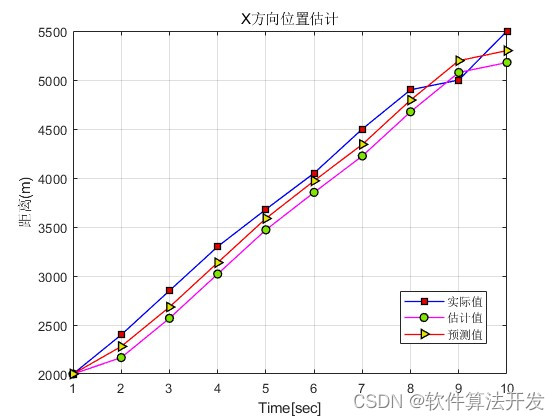
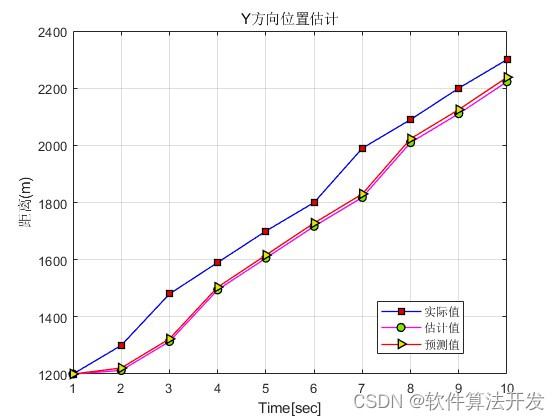
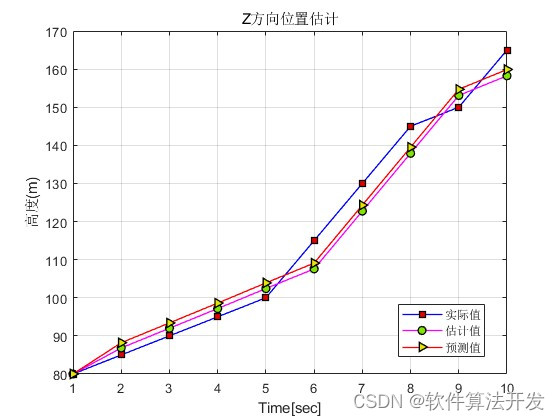
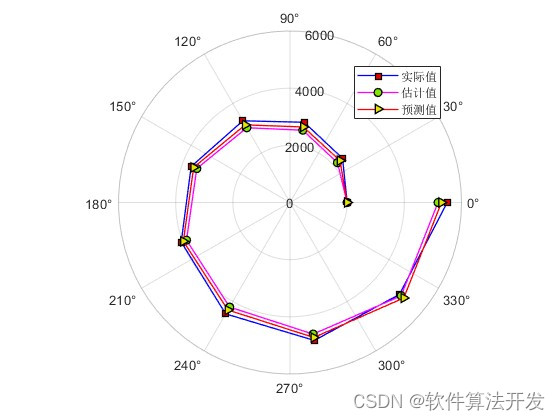
使用卡尔曼滤波对UAV在三维空间场景中的运动轨迹进行预测和估计,最后输出预测轨迹,估计轨迹以及三维空间轨迹估计结果。
2.测试软件版本以及运行结果展示
MATLAB2022a版本运行
3.核心程序
for k=1:length(X_direct)-1
%第一个估计
Xk_ = [X_direct(k);Vx_direct(k)];
uk1 = Xa;
Xk_A = A_klm*Xk_;
Xk_B = B_klm*uk1;
Xk_AB = Xk_A+Xk_B;
P_klm =[P_klm;Xk_AB];
%初始化过程协方差矩阵
Pk_ =[((Mat_x).^2) 0;0 ((Mat_vx).^2)];
%预测过程协方差矩阵
Pk_A =((A_klm)*(Pk_));
Pk_B =((Pk_A)*(A_klm'));
Pk_AB =(Pk_B-[0 Pk_B(2);Pk_B(3) 0]);
%计算卡尔曼增益
R_klm =[((Xerr)^2) 0;0 ((Vxerr)^2)];
H_klm =[1 0 ; 0 1];
K3_klm =((Pk_AB)*H_klm')/((H_klm*Pk_AB*H_klm')+R_klm);
%新观察
Ykm =[X_direct(k);Vx_direct(k)];
C_klm =[1 0;0 1];
Yk =C_klm*Ykm;
%计算当前状态
Xk =[Xk; Xk_AB + K3_klm*(Yk-(H_klm*(Xk_AB)))];
%更新过程协方差矩阵
Pk1 =((eye)-(K3_klm*H_klm))*Pk_AB;
pk =(Pk1-[0 Pk1(3);Pk1(2) 0]);
end
00054.本算法原理
随着无人机技术的飞速发展,无人机在各个领域的应用越来越广泛,如航拍、物流运输、环境监测等。在这些应用中,精确的三维轨迹跟踪是实现无人机自主飞行和导航的关键技术之一。而Kalman滤波作为一种有效的状态估计方法,在无人机轨迹跟踪中具有重要的应用价值。
4.1、Kalman滤波算法原理
Kalman滤波是一种基于最小均方误差的最优估计方法,适用于线性动态系统的状态估计。其核心思想是通过系统的状态方程和观测方程,利用前一时刻的状态估计值和当前时刻的观测值,来更新当前时刻的状态估计值。Kalman滤波算法主要包括两个步骤:状态预测和观测更新。
状态预测
根据系统的状态方程和前一时刻的状态估计值,预测当前时刻的状态值。状态预测的数学公式如下:
Xk|k−1=FXk−1|k−1+BUk−1X_{k|k-1} = FX_{k-1|k-1} + BU_{k-1}Xk∣k−1=FXk−1∣k−1+BUk−1
其中,Xk|k−1X_{k|k-1}Xk∣k−1 表示当前时刻的状态预测值,Fk|k−1F_{k|k-1}Fk∣k−1 表示状态转移矩阵,Bk−1B_{k-1}Bk−1 表示控制矩阵,Uk−1U_{k-1}Uk−1 表示控制输入。
观测更新
根据系统的观测方程和当前时刻的观测值,更新当前时刻的状态估计值。观测更新的数学公式如下:
Kk=Pk|k−1HT(HPk|k−1HT+R)−1K_{k} = P_{k|k-1}H^{T}(HP_{k|k-1}H^{T} + R)^{-1}Kk=Pk∣k−1HT(HPk∣k−1HT+R)−1
其中,KkK_{k}Kk 表示卡尔曼增益,Pk|k−1P_{k|k-1}Pk∣k−1 表示预测误差协方差矩阵,HHH 表示观测矩阵,RRR 表示观测噪声协方差矩阵。
通过不断地进行状态预测和观测更新,Kalman滤波算法可以实时地估计出系统的状态值。
4.2、基于Kalman滤波的UAV三维轨迹跟踪算法
在UAV三维轨迹跟踪中,我们可以将UAV的位置和速度作为系统的状态变量,利用Kalman滤波算法对UAV的轨迹进行跟踪。具体流程如下:
1.建立UAV的运动模型,包括位置方程和速度方程。
2.利用Kalman滤波算法对UAV的位置和速度进行估计,得到UAV的实时位置和速度。
3.根据估计得到的位置和速度,生成UAV的三维轨迹。
通过上述流程,我们可以实现基于Kalman滤波的UAV三维轨迹跟踪。在这个过程中,需要用到上述的Kalman滤波算法的原理和数学公式。
使用基于Kalman滤波的UAV三维轨迹跟踪算法,可以有效地提高轨迹跟踪的精度和稳定性。在实际应用中,我们可以通过对比真实轨迹与估计轨迹的误差,来评估算法的性能。同时,还可以通过改变观测噪声协方差矩阵RRR 和过程噪声协方差矩阵QQQ 的取值,来调整算法的滤波效果,以适应不同的应用场景和需求。
5.完整程序
VVV
















 311
311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











