






奥比中光的深度相机Orbbec Femto Bolt是Microsoft的Azure Kinect DK的升级版,根据官网的文档配置环境遇到了一些问题,记录一下。官网文档链接![]() https://www.orbbec.com.cn/index/Sdkdoc/info.html?cate=117&id=58
https://www.orbbec.com.cn/index/Sdkdoc/info.html?cate=117&id=58
1、首先连接相机到电脑USB3.0,接通电源,相机前后的两个指示灯常亮为正确连接。
2、去资源商店搜索Azure Kinect and Femto Bolt Examples for Unity,后续将使用这个插件。在这个资源的概述中可以下载Azure-Kinect Sensor SDK和Azure Kinect Body Tracking SDK,但不是最新版。可以去Azure Kinect DK 官方页面![]() https://github.com/Microsoft/Azure-Kinect-Sensor-SDK和Azure Kinect Body Tracking SDK 官网
https://github.com/Microsoft/Azure-Kinect-Sensor-SDK和Azure Kinect Body Tracking SDK 官网![]() https://learn.microsoft.com/en-us/previous-versions/azure/kinect-dk/body-sdk-download下载最新版。
https://learn.microsoft.com/en-us/previous-versions/azure/kinect-dk/body-sdk-download下载最新版。
我下载的是Azure Kinect SDK 1.4.1.exe和Azure Kinect Body Tracking SDK 1.1.2.msi,unity版本是2022.3.17f1c1。
3、默认位置安装好后,如果是AzureKinect设备就能直接打开k4aviewer.exe连接设备进行测试了,但这是Femto Bolt,现在直接打开k4aviewer.exe识别不到设备,还需要多一点操作。
根据文档AKDK 应用如何切换到Orbbec SDK K4A Wrapper![]() https://www.orbbec.com.cn/index/Sdkdoc/info.html?cate=117&id=34
https://www.orbbec.com.cn/index/Sdkdoc/info.html?cate=117&id=34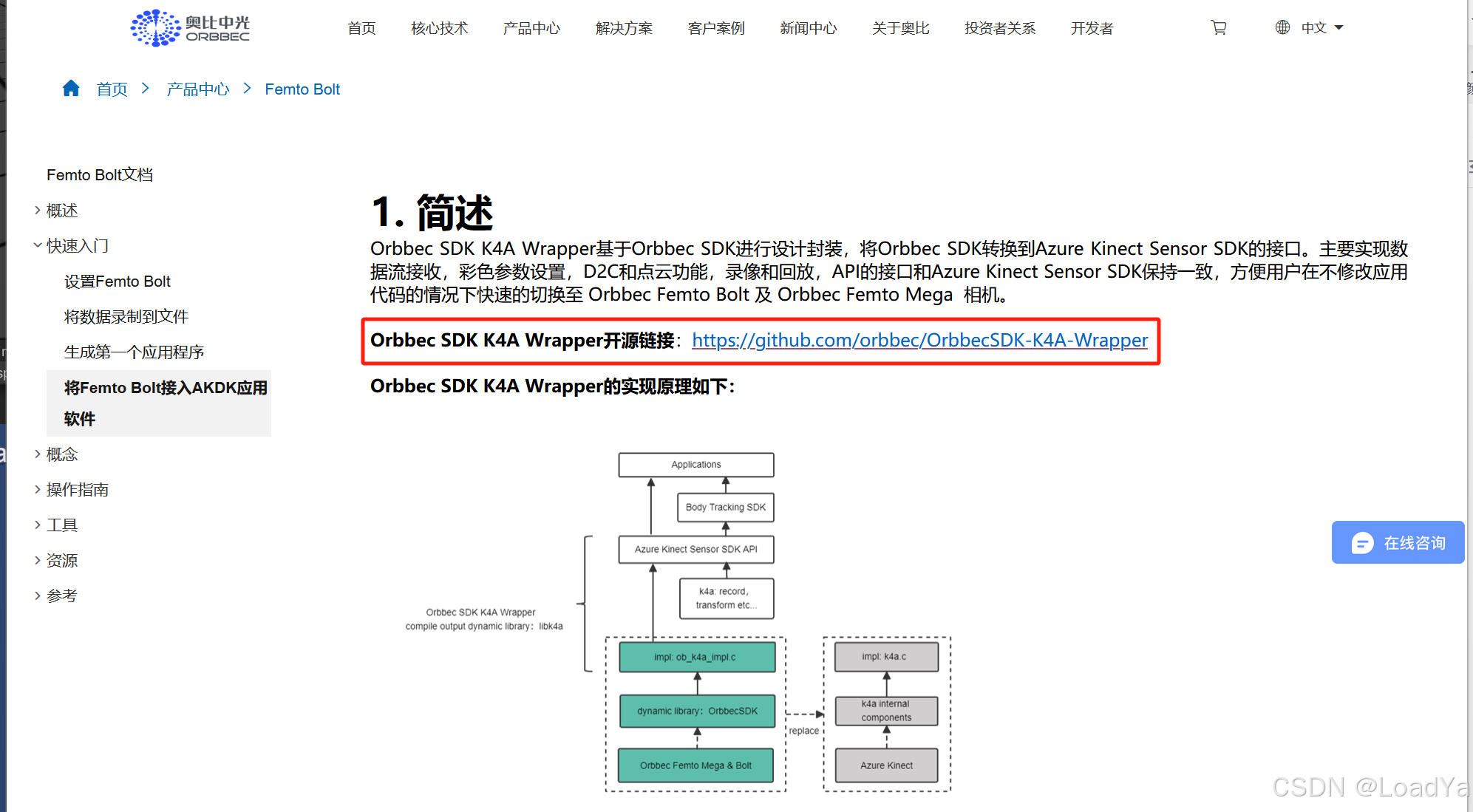
点击这一页的开源链接下载Orbbec SDK K4A Wrapper,跟着文档中的步骤一路替换,替换完成后再打开k4aviewer.exe就能识别到设备了。
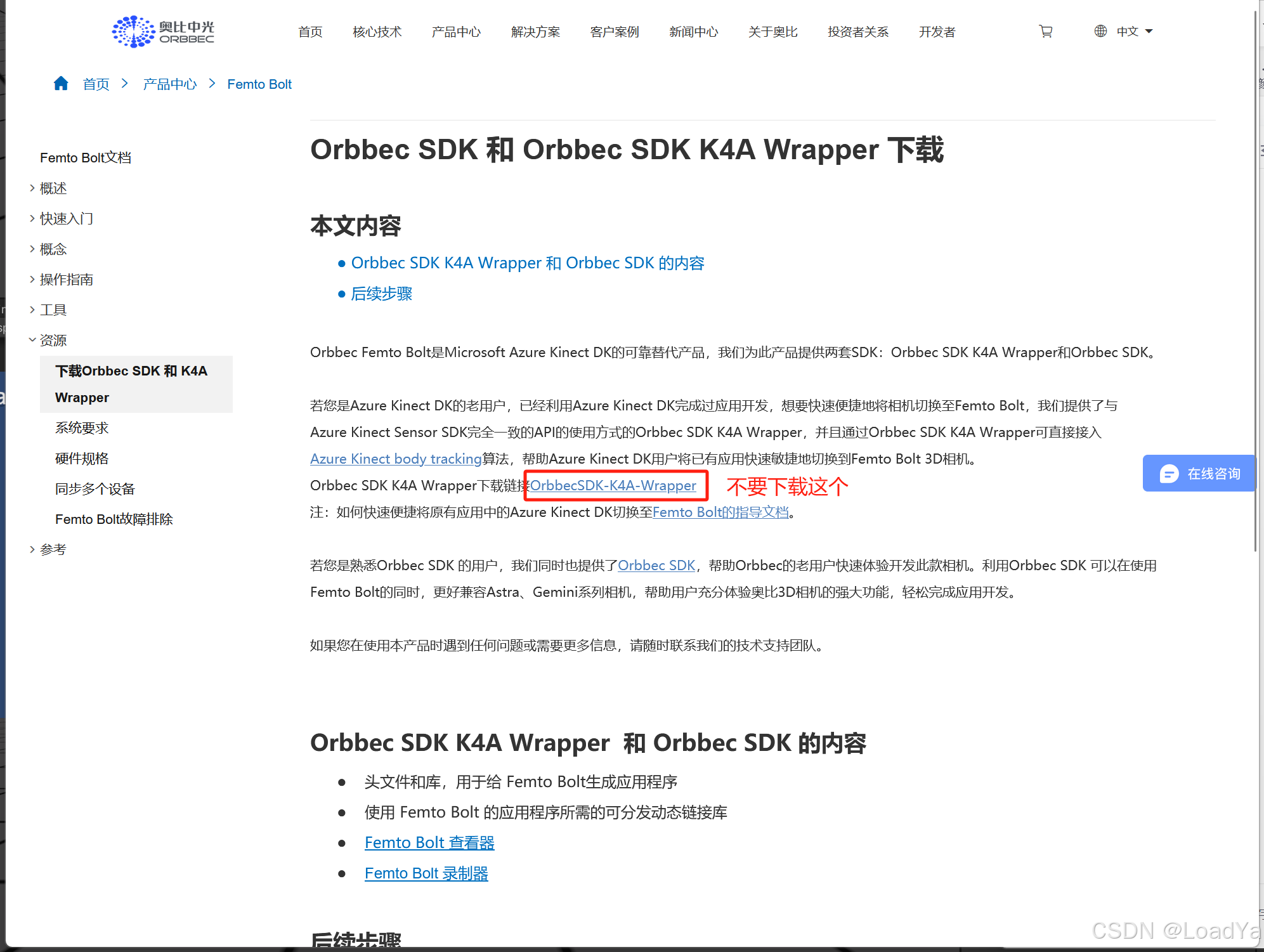
注意不要下这个链接的,我刚开始就下的这里的Orbbec SDK K4A Wrapper,结果找半天找不到文档里说的头文件和库文件。
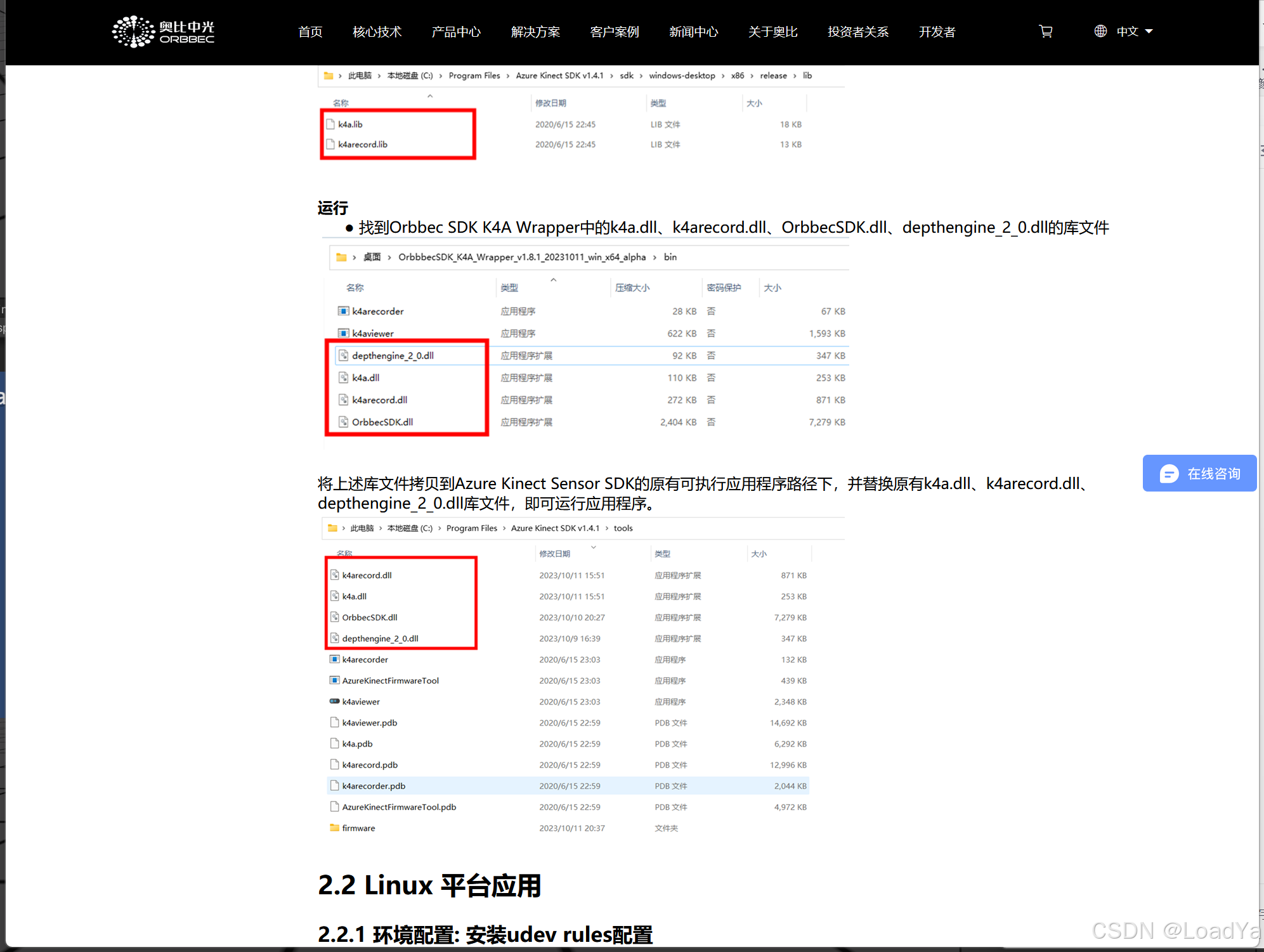
和官方文档还有一点差别在这里,还有两个文件要一起复制过去。
官方文档:
实际操作:
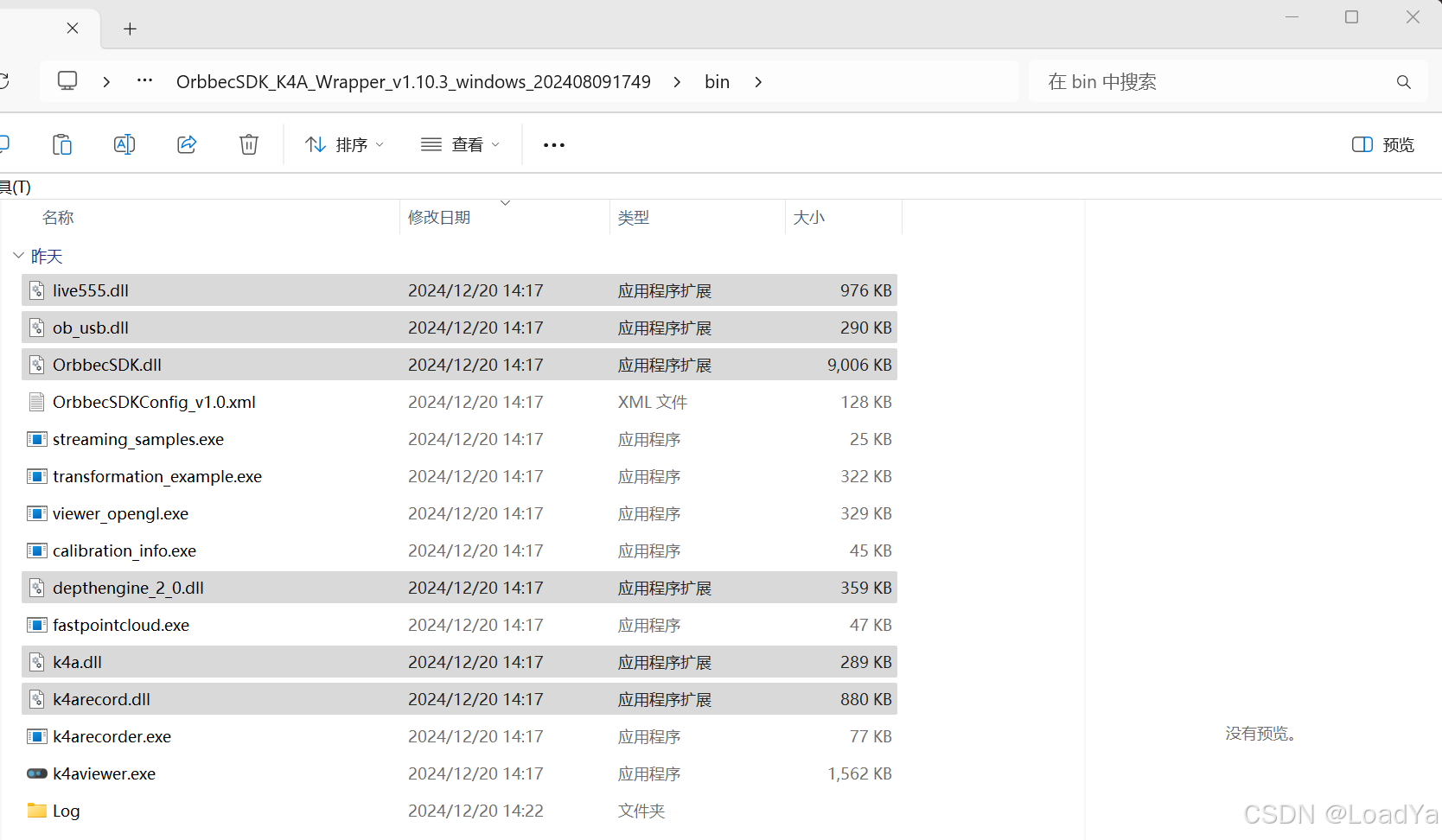
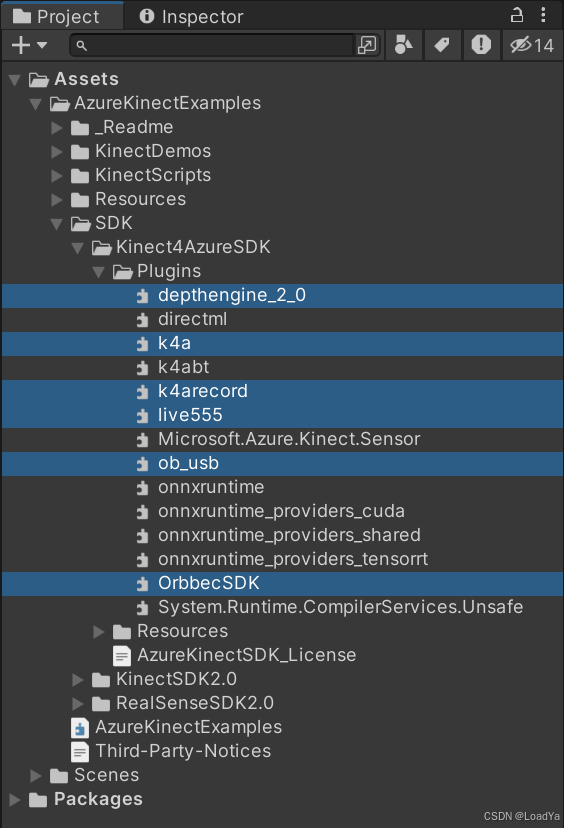
最后,导入Azure Kinect and Femto Bolt Examples for Unity插件,把上面的6个文件复制到对应的文件夹里,就可以正常运行了。

















 1137
1137

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









