






待更新。。。
apollo 决策算法和运动规划算法学习:
速度规划一共涉及了六个task,它们的功能分别为:
1 ST_BOUNDS_DECIDER:
根据对于障碍物的决策以及道路限速来构建ST图中每一时刻的上下限范围;
2 SPEED_BOUNDS_PRIORI_DECIDER:
根据道路限速,曲率,障碍物信息计算对于path每个点的限速
对上一task生成的ST boundary进行更细致的调整
3 SPEED_HEURISTIC_OPTIMIZER:利用动态规划&回溯的方法在ST图中搜索出一系列可行的速度点集
4 SPEED_DECIDER:对障碍物再做一次决策
5 PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER:
对第三步的速度点集进行线性插值得到折线轨迹,再进行二次平滑优化;对轨迹点上的speed_limit和curvature进行二次优化,最终对速度点集进行非线性优化(这部分我后面会重点讲到)
决策规划模块一分为三:
1.导航规划算法,此算法将计某出大地图上A到B的最优路经。
特点:导航算法会给一个粗略的,大范图的路径,但是此路经不会考虑如何避障,也不会考虑车辆动力学约束,一般规划的路经是不规则的折线。
一般只需要执行一次,只有遇到大范围的拥堵,施工,偏航等情况会再次执行。
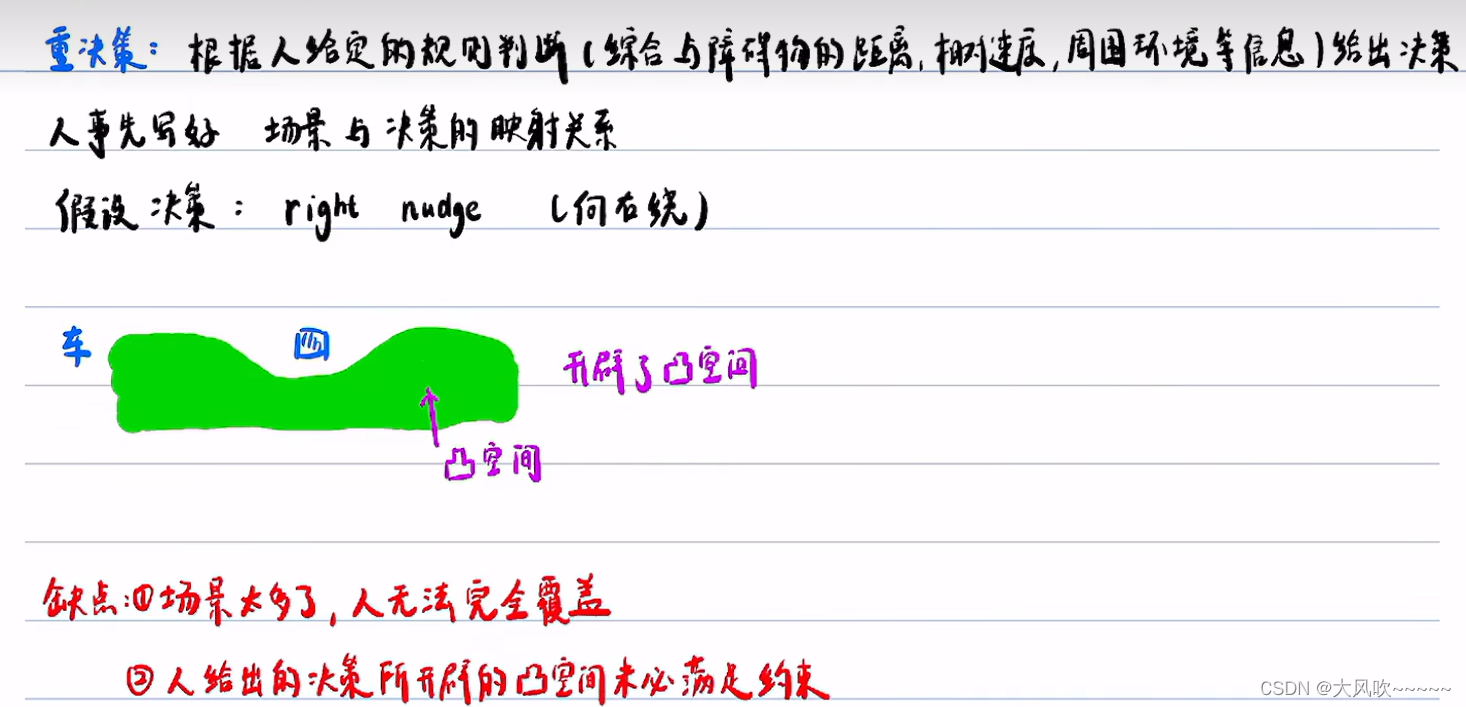
2.行为规划算法,又叫决策算法,决定车辆行驶意图的算法,对于静态体碍物,到底往左绕还是往右绕,对动动态障碍物,到底该减连避让 还是加速超车?
决策算法决定了车辆的意图,这也是整个规划算法中最难做的部分
特点: 决策算法会给一个车辆的行驶意图,会指导车辆该避让,该超车,该左转该转,但是决策不去给具体的运动建议,例如往左转多少度,车辆加速到多少。
实际环境晚息为变,因此决策算法需要较高的执行频率一般为 10 Hz
决策算法需要有一定的稳定性,不允许在周围环境稳定时出现“朝令夕改”现象
- 运动规划算法 : 根据决策给出的行为意图在相关的时空中搜索出(或优化出)一条具有详细路径速度信息,并且满足各个约束条件的轨迹,并将此轨迹发给控制模块去跟踪,
此就长度-般在几米到几十米不等
特点: 运动规划生成的轨迹是决策规划模块的最终输出,具有详细的路经速度的信息,执行频率与决策相同,为10 Hz,同样,运动规划也要求有一定的稳定性



参考博文:















 1922
1922











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









