







多途经点的最短物流配送路径算法
目录
- 1. 需求背景
- 2. TSP旅行商问题概述
- 3. TSP算法分析
- 4. 路径规划实现方案一:开源GraphHopper框架 + TSP算法组合
- 5. 路径规划实现方案二:高德驾车规划API + TSP算法组合
- 6. 总结
- 7. 启发式算法测试结果
1. 需求背景
在物流配送领域,优化多途经点的路径规划对于提高效率、降低成本至关重要。旅行商问题(TSP)是解决此类问题的经典模型。本报告将详细分析两种解决方案:一种基于开源GraphHopper框架,另一种基于高德驾车规划API,并结合TSP算法进行路径优化。
2. TSP旅行商问题概述
1)TSP问题定义
旅行商问题(Traveling Salesman Problem, TSP)是一个经典的组合优化问题。经典的TSP可以描述为:一个商品推销员要去若干个城市推销商品,该推销员从一个城市出发,需要经过所有城市后回到出发地。应如何选择行进路线,以使总的行程最短。在物流中,TSP对应物流配送公司需将n个客户的订货沿最短路线全部送达的问题。
2)公式
对于n个点,TSP的路径数是固定起点后的全排列数(即环排列),计算公式为:
(
n
−
1
)
!
(n−1)!
(n−1)!
3)数值大小
- 10个坐标点位: 9 ! = 362 , 880 9! = 362,880 9!=362,880种路径组合
- 50个坐标点位: 49 ! ≈ 6.08 × 1 0 62 49! ≈ 6.08 \times 10^{62} 49!≈6.08×1062种路径组合
4)实际意义
- TSP属于NP难问题,实际中需用穷举法、动态规划、启发式算法(如遗传算法、蚁群算法)或近似解法优化计算。
- 即使每秒计算1万亿种路径,遍历50个点的 49 ! 49! 49!种可能性所需时间远超宇宙年龄(约 1.38 × 1 0 10 1.38 \times 10^{10} 1.38×1010年)。
3. TSP算法分析
穷举法、动态规划算法
过程:
- 生成所有可能的路径排列。
- 计算每条路径的总距离。
- 选择总距离最小的路径作为最优解。
局限性:
- 计算复杂度高:时间复杂度为 O ( n ! ) O(n!) O(n!)。
- 内存消耗大:需存储所有路径排列。
- 不适用于大规模问题(点数超过10时计算时间显著增加)。
启发式与近似算法
遗传算法(GA)
过程:
- 初始化种群:随机生成一组初始路径。
- 选择:根据适应度函数选择优秀个体。
- 交叉:生成新个体。
- 变异:保持种群多样性。
- 进化:重复直至满足终止条件。
优缺点:
- 优点:全局搜索能力强,并行化潜力大。
- 缺点:参数敏感,需调优。
模拟退火(SA)
过程:
- 初始化温度。
- 生成邻居解(随机交换路径中的两个城市)。
- 根据温度和距离差决定是否接受新解。
- 降温直至终止条件。
优缺点:
- 优点:实现简单,能跳出局部最优解。
- 缺点:收敛速度慢。
蚁群算法(ACO)
过程:
- 初始化信息素。
- 蚂蚁探索路径。
- 更新信息素。
- 迭代优化直至收敛。
优缺点:
- 优点:适合大规模问题。
- 缺点:参数调整复杂。
4. 路径规划实现方案一:开源GraphHopper框架 + TSP算法组合
方案概述
结合GraphHopper处理实际路网数据(如道路距离、交通限制),通过TSP算法优化多点访问顺序,生成全局最优或近似最优路径。
技术架构与流程
-
数据基础:
- 使用OpenStreetMap(OSM)作为路网数据源。
- 输入目标点位的经纬度坐标。
-
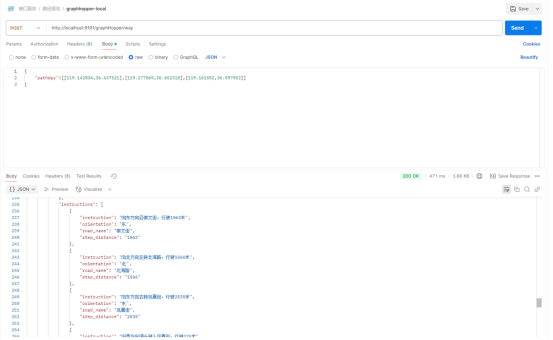
核心步骤:
- 调用GraphHopper API计算点对点实际道路距离,构建代价矩阵。
- 输入TSP算法生成最优访问顺序。
- 生成分段导航路线。
-
动态优化:
- 集成实时交通数据更新代价矩阵。
- 支持时间窗口、车辆载重等约束,升级为VRP解决方案。
方案优势
- 开源灵活,支持多种地图格式和路由算法。
- 高度可定制化(如遗传算法、模拟退火)。
- 性能优越,可并行计算加速。
方案劣势
- 中国区域地图更新延迟。
- 部署与维护成本高。
- 硬件资源需求大。
示例图
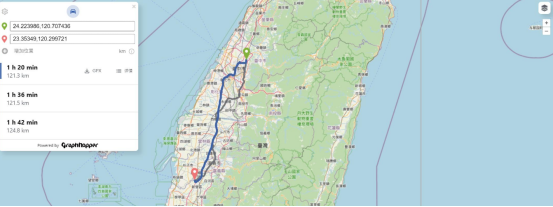
数据结构
5. 路径规划实现方案二:高德驾车规划API + TSP算法组合
方案概述
基于高德API获取实时路况数据,结合TSP算法生成高效路径,适用于同城配送、跨城物流等场景。
技术架构与流程
-
数据输入:
- 调用高德API获取点对点行驶距离/时间。
- 输入目标点位的经纬度或POI信息。
-
核心流程:
- 构建实时路况驱动的代价矩阵。
- 输入TSP算法生成优化序列。
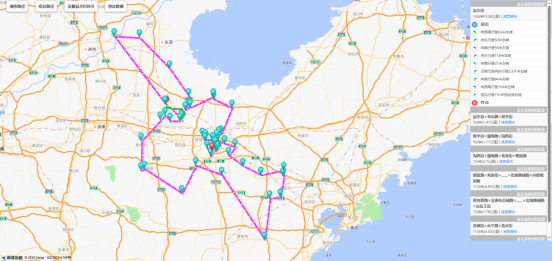
- 拼接分段导航路线并可视化。
-
扩展能力:
- 支持定时刷新路况数据。
- 支持时间窗、车辆容量等约束。
方案优势
- 实时路况支持,路线精准。
- 稳定性高,节省开发时间。
- 集成便捷,无需自建服务器。
方案劣势
- 依赖外部服务(高德API)。
- 接口调用费用随使用量增加。
6. 总结
方案对比
| 方案 | 优势 | 劣势 |
|---|---|---|
| GraphHopper + TSP | 开源、高性能 | 地图更新慢、部署成本高 |
| 高德API + TSP | 实时路况、易用性高 | 依赖外部服务、接口费用 |
推荐方案:高德驾车规划API + TSP算法组合
理由:
- 实时路况与高精度地图更适合中国区域。
- 简化开发流程,提高稳定性。
- 灵活应对复杂业务场景。
TSP算法选择策略:
- n ≤ 15 n \leq 15 n≤15:穷举法或动态规划(精准解)。
- n > 15 n > 15 n>15:启发式算法(如蚁群算法,近似解)。
7. 启发式算法测试结果
测试目的
验证蚁群算法参数对55个点位TSP问题的性能影响。
测试环境
- 问题规模:55个点位(53个途经点 + 起点/终点)。
- 硬件配置:i5-11400F @ 2.60GHz,32GB RAM。
- 算法版本:改进型蚁群算法(支持精英信息素沉积)。
推荐配置
- 实时场景:100蚂蚁 + 20k次迭代。
- 离线优化:200蚂蚁 + 20k次迭代。
优化方向
- 利用GPU加速计算。
- 结合遗传算法减少迭代次数。
- 动态调整参数平衡探索与开发。

















 671
671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









