







目录
一、前言
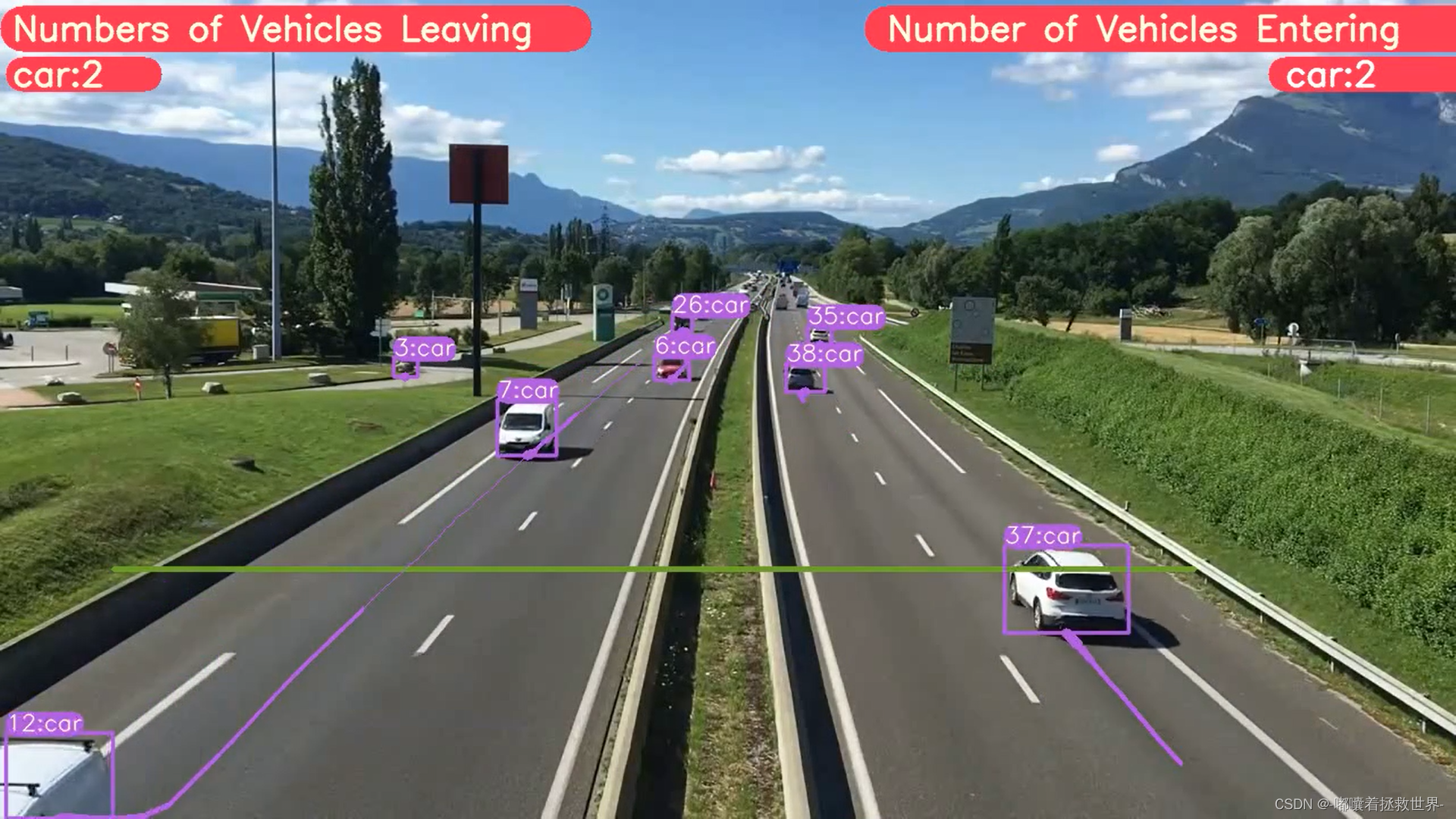
欢迎阅读本篇博客!今天我们深入探索YOLOv8+deepsort视觉跟踪算法。结合YOLOv8的目标检测和deepsort的特征跟踪,该算法在复杂环境下确保了目标的准确与稳定跟踪。在计算机视觉中,这种跟踪技术在安全监控、无人驾驶等领域有着广泛应用。本文重点探讨基于此算法的车辆检测、跟踪及计数。演示效果如下:
二、开发环境(前提条件)
1、Anaconda3 环境
2、pycharm 代码编辑器
3、虚拟环境 python 3.8
(安装教程:Anaconda3+pycharm安装教程)(强烈推荐√)
(代码安装资源:YOLOv8-Deepsort 免费源码)(强烈推荐√)
因为看到很多开源的资源都是要么付费,要么需要vip才能下载,实在看不下去了!!!所以我决定代码直接免费,这么良心的博主不给个点赞+关注+收藏嘛 (๑′ᴗ‵๑)
三、环境搭建教程
3.1、创建虚拟环境
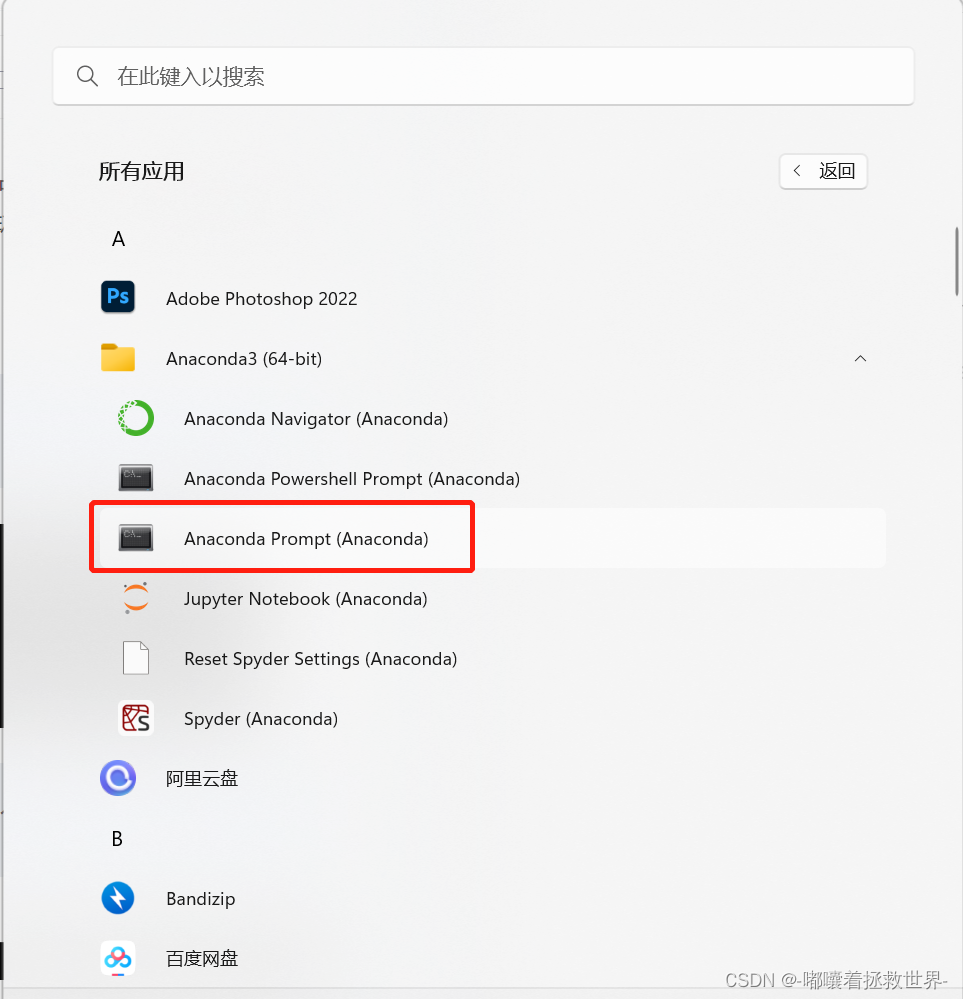
首先打开anaconda prompt,输入conda env list查看环境列表,如果没有安装虚拟环境,会显示只有一个base。
然后输入指令:
conda create -n YOLOv8-Deepsort python=3.8接着输入y,等待安装完毕,即可创建好虚拟环境。
(注意:YOLOv8-Deepsort 是我自己命名的环境名称,可随意命名。)
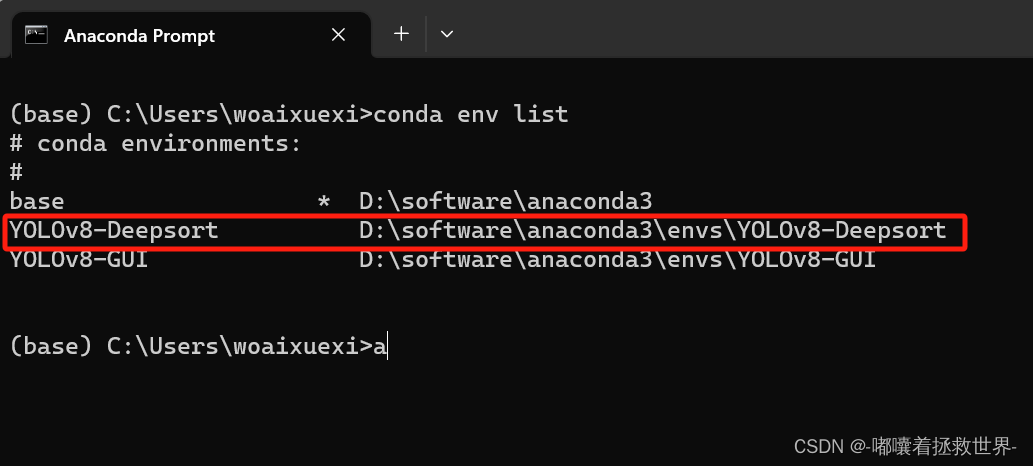
等待安装好后再次输入:
conda env list查看环境列表,此时环境中就会多出自己创建的虚拟环境了。
3.2、选择虚拟环境并安装所需要的包
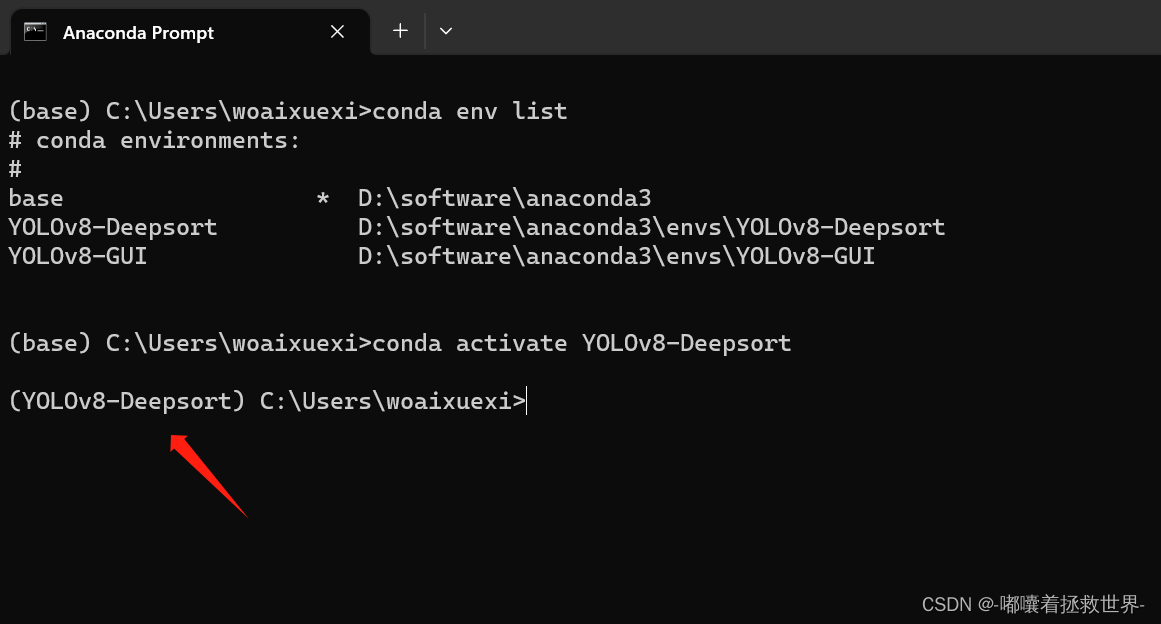
输入 conda activate YOLOv8-Deepsort 进入你的虚拟环境
conda activate YOLOv8-Deepsort如果前面的括号里由原来的base变成了你的虚拟环境名称,那么恭喜你,环境选择成功了哟!
3.3、运行代码步骤
3.3.1、克隆 git 储存库
git clone https://github.com/MuhammadMoinFaisal/YOLOv8-DeepSORT-Object-Tracking.git也可以点击这个资源免费下载:YOLOv8-Deepsort 免费源码(强烈推荐)
3.3.2、转到克隆库的文件夹下
cd YOLOv8-DeepSORT-Object-Tracking3.3.3、安装依赖项
pip install -e ".[dev]"3.3.4、转到检测目录下
cd ultralytics/yolo/v8/detect3.3.5、用于yolov8物体检测+跟踪+车辆计数
python predict.py model=yolov8l.pt source="test3.mp4" show=True四、效果图
运行完以上那些命令就可以像视频那样的效果啦(~ ̄▽ ̄)~
五、可能出现的Error(如果出现报错请看这个)
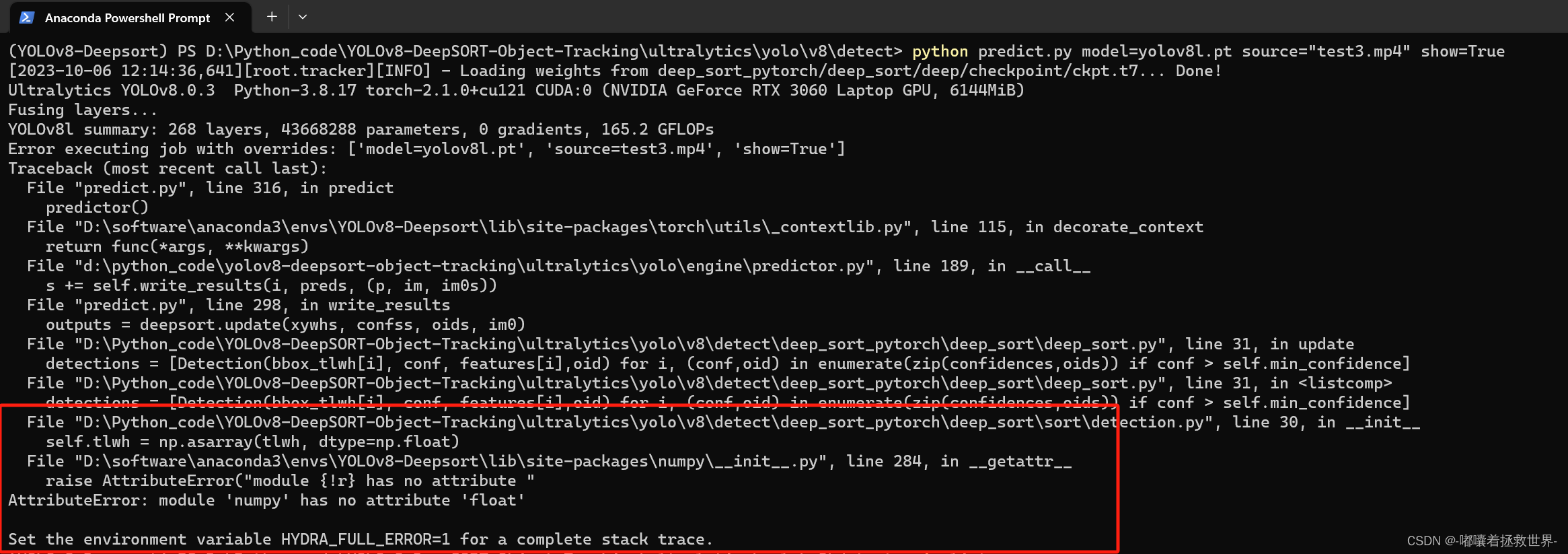
AttributeError: module 'numpy' has no attribute 'float'
Set the environment variable HYDRA_FULL_ERROR=1 for a complete stack trace.出现以上的报错呢,可以这样改,我使用的numpy版本是1.24,但是从代码中所用的代码是依赖于旧版本的Numpy。您可以将你的Numpy版本降级到1.23.5。
pip install numpy==1.23.5然后再运行上面那个用于yolov8物体检测+跟踪+车辆计数的运行命令即可。



















 5554
5554

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











