







0. 前言
终于到了FOC无感入门的最后被一个章节了,无感foc的启动其实很好理解,分为三个阶段:转子定位、I/F强拖、电流转速双闭环。
1. 无感foc启动
(1)转子定位阶段:
首先将q轴电流设定一个能将转子拖动的值Iq_force,Id给0,角度给0,进行反park变换和SVPWM,产生一个固定的磁场将转子拖动到初始位置,然后切换到I/F强拖阶段。
(2)I/F强拖阶段:
由于电机处于低速时,产生的反电动势比较小,通过滑模观测器观测到的角度和转速并不准确,所以要通过强拖将电机转速拉升到一定值后,再切换到滑模观测器观测的角度去进行控制。
在强拖阶段我们其实并不关心转子的实际位置到底处于哪里,我们只需要人为给定一个不断增加的转子角度θ_force,由于q轴电流一直都是Iq_force大小,而角度开始变化了,因此产生的磁场开始旋转了,带动着电机转动。
当磁场旋转的速度达到一定的值了之后,这时电机的转速也跟着上来了,此时滑模观测器观测到的角度和转速就比较准确了,可以进行速度开环切速度闭环了。
这里有两个需要注意的点:1.转子定位阶段和I/F强拖阶段电流都是闭环的,I/F强拖阶段的转速是开环的;2.强拖时要注意控制磁场旋转的速度慢慢增加,否则可能会出现强拖失败的情况。
(3)转速开环切闭环阶段
这个阶段是整个启动过程中最重要的阶段,由于I/F强拖时使用的角度是人为给定的θ_force,而滑模观测器观察到的转子的角度是θ_smo,这两个坐标系存在一个角度差Δθ,如下图所示:
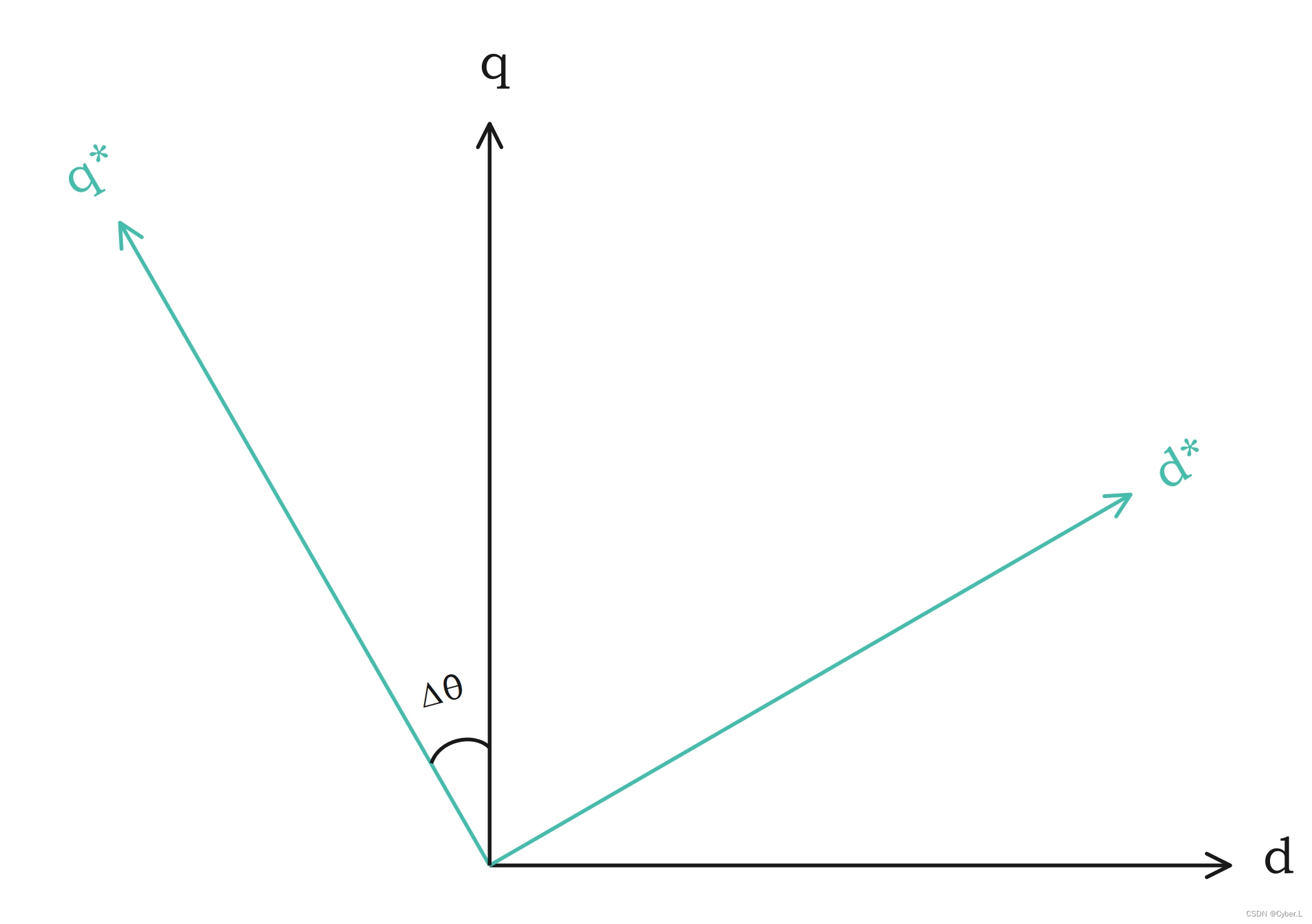
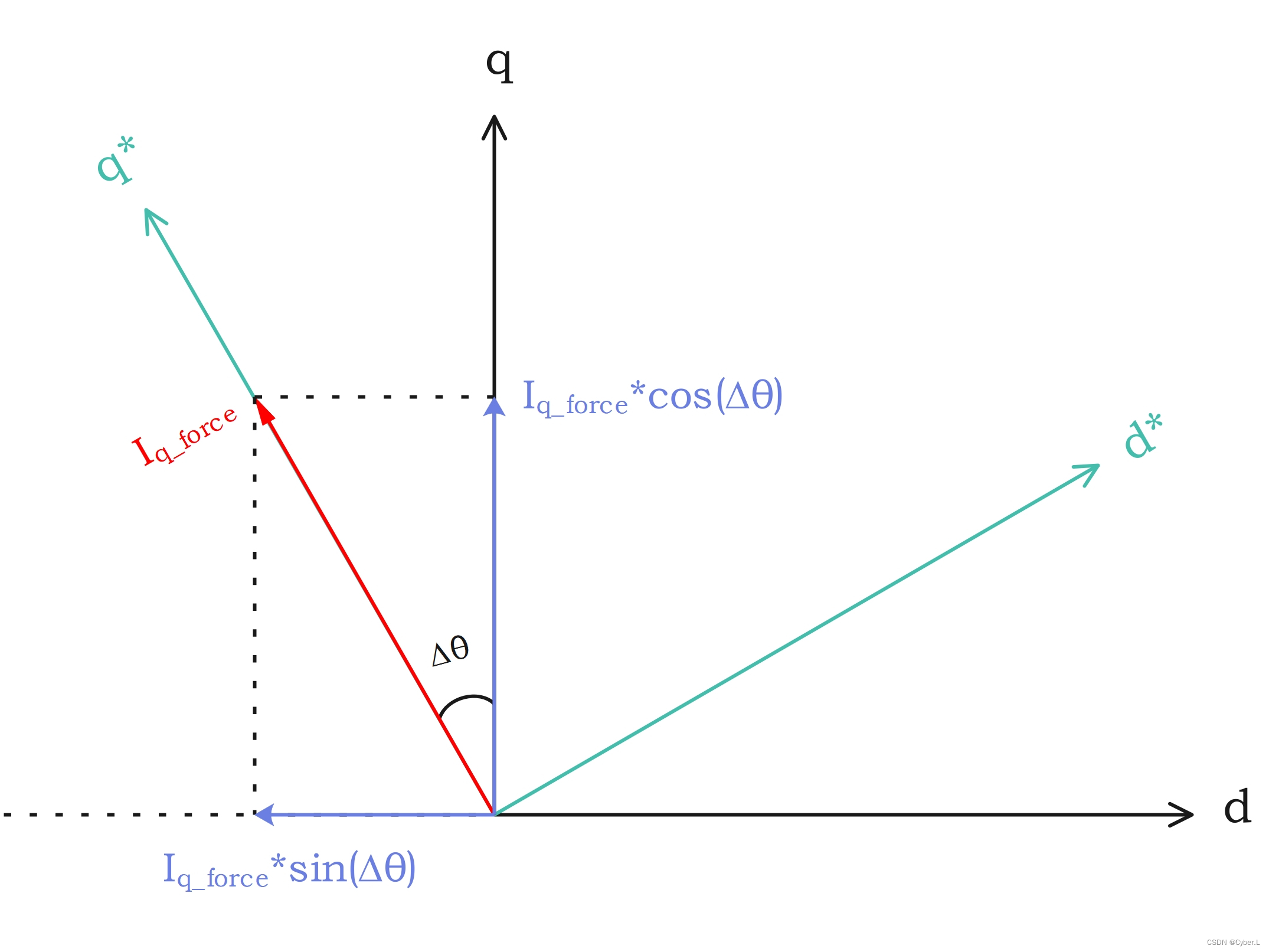
图中d*q*坐标系是强拖时人为给定的旋转坐标系,而dq是转子实际的旋转坐标系。我们在从原来的强拖角度切换到滑模观测器观测到的实际角度的时候,需要将原来d*q*坐标系下的Iq_force等效变换过来,只有这样转矩才不会突变,如下图所示:
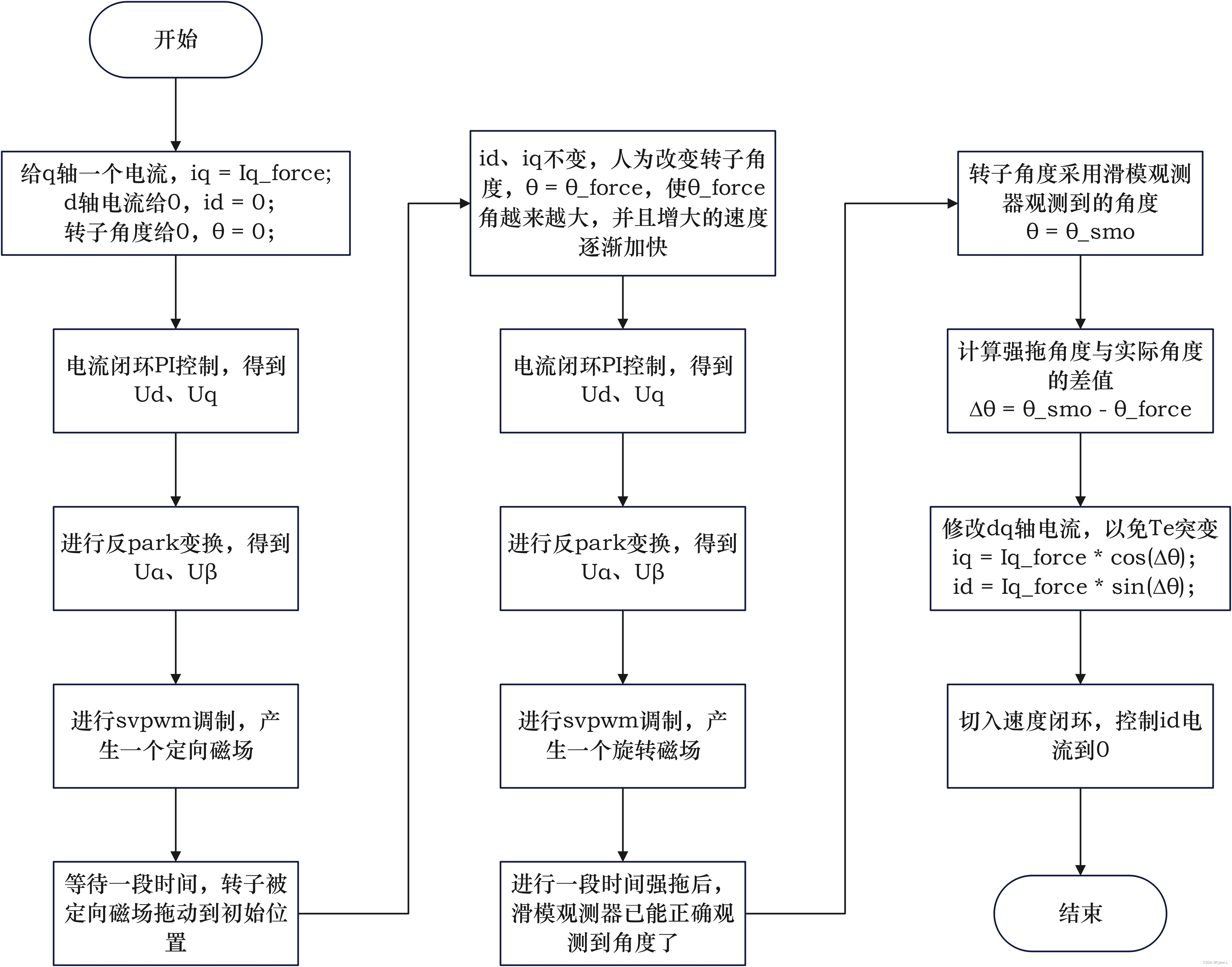
最后再将d轴电流慢慢降为0,这就是无感foc启动的整个过程,整个流程图如下图所示:
2. 总结
无感foc入门到这里就结束了,后面安排是先搭建好模型,然后开始码代码,封一些foc的算法库,这些做完之后再开始给大家分享新的文章,计划会讲讲电流前馈补偿、积分抗饱和、弱磁控制、MTPA,可能还会开两个系列分别讲讲BLDC的有感/无感六步方波控制、步进电机的细分控制吧。



















 1557
1557

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











