







目录
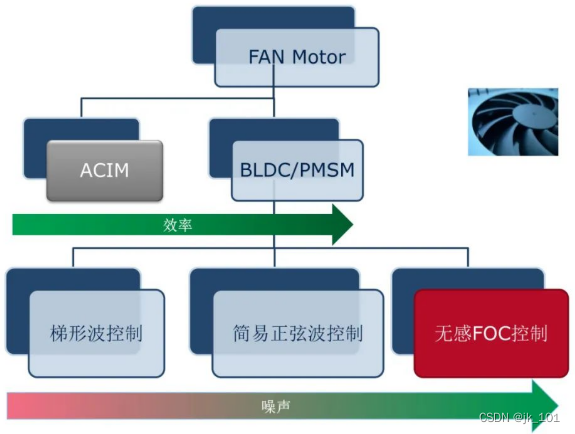
风机用电机以及控制方式
如图所示:
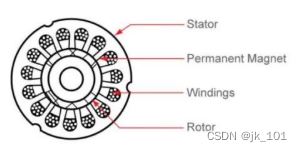
风机用直流无刷电机
基本做成:定子绕组、转子、机体
AC定子电流
转子为永磁体
如图所示:
两种类型
BLDC:直流无刷电机
PMSM:永磁同步电机
差异性
PMSM的反电动势为正弦波
BLDC的反电动势为梯形波
如图所示:

FOC的控制原理
FOC的基本概念
定义
FOC-Field Oriental Control,磁场定向控制,又称矢量控制,是通过控制变压器输出电压的幅值和频率控制三相交流电机的一种变频控制方法。
基本思想
通过测量和控制电机的定子电流矢量,根据磁场定向原理分别对电机的励磁电流和转矩电流进行控制,从而将三相交流电机等效为直流电机控制。
实现步骤
通过坐标变换,将三相静止坐标系转换为两相旋转的坐标系,从而使三相交流耦合的定子电流转换为相互正交,独立解耦的转矩与励磁分量,从而到达类似于他励直流电机通过控制转矩电流直接控制转矩的目的。
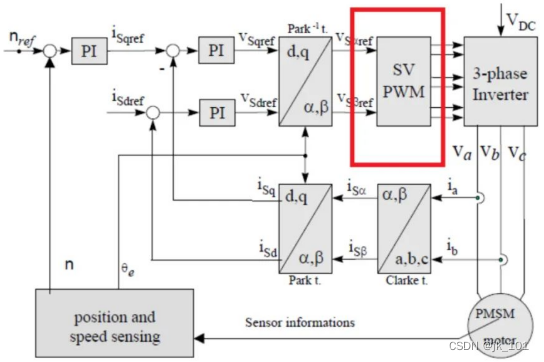
FOC的结构框图
FOC结构框图

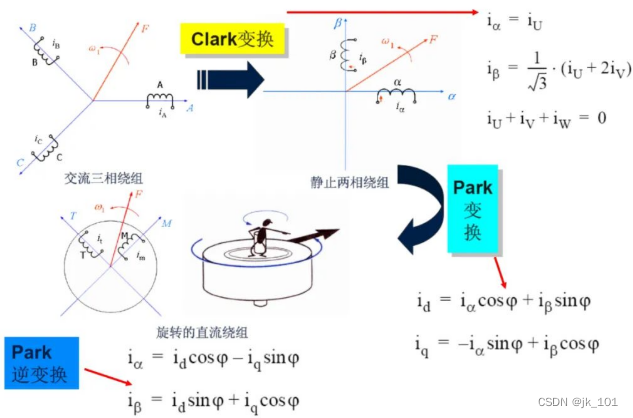
FOC的控制核心--坐标变换
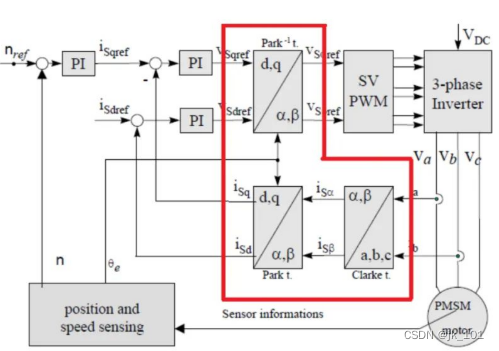
FOC的控制核心--坐标变换
坐标系
定子坐标系(静止)
A-B-C坐标系(三相定子绕组、相差120度)
α-β坐标系(直角坐标系:α轴与A轴重合、β轴超前α轴90度)
转子坐标系(旋转)
d-q坐标系(d轴-转子磁极的轴线、q轴超前d轴90轴)
定向坐标系(旋转)
M-T坐标系(M轴固定在定向的磁链矢量上,T轴超前M轴90度)
转子磁场定向控制--M-T坐标系与d-q坐标系重合
坐标变换过程
FOC的控制核心--SVPWM
空间矢量
根据功率管的开关状态(上管导通是“1”,关闭是“0”)定义了8个空间矢量。其中000和111是零矢量。如图所示:

扇区
空间矢量构成6个扇区
确定Vref位于哪个扇区,才能知道用哪对相邻的基本矢量,空间矢量去合成Vref。

参考电压矢量合成
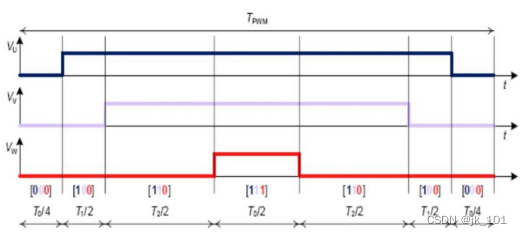
利用基本电压空间矢量的线性时间组合得到定子参考电压Vref。如图所示:

七段式SVPWM,由3段零矢量和4段相邻的两个非零矢量组成。3段零矢量分别位于PWM的开始、中间和结尾。
非零电压空间矢量能使电机磁通空间矢量产生运动,而零电压矢量使磁通空间矢量静止。
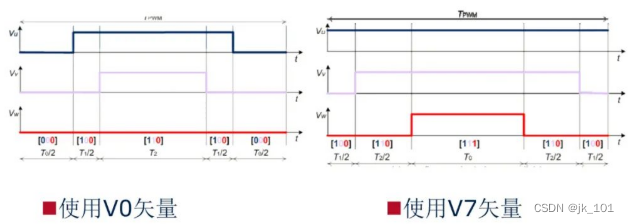
五段式SVPWM,有两种方式 。为方便电流采样通常采用V0矢量方式,如图所示:
7段式SVPWM、5段式SVPWM端电压对比,如图所示:
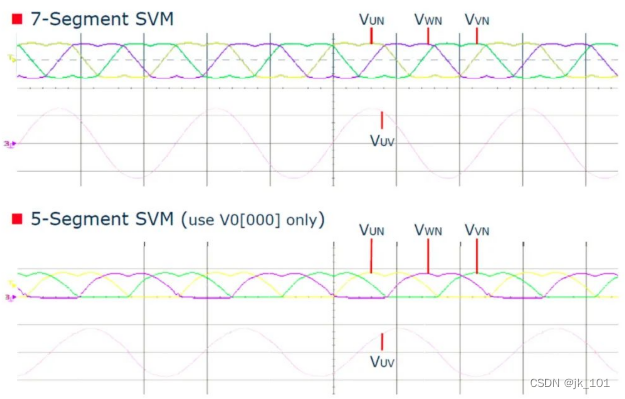
7段式SVPWM、5段式SVPWM的选择

FOC的控制要素-电流采样输入

FOC的控制要素-母线电压
母线电阻电流采样
SVPWM开关VS直流母线电流

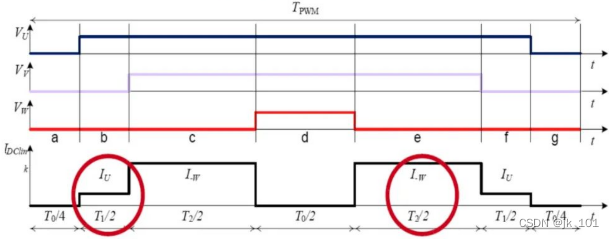
FOC的控制要素-母线电流还原相电流
母线电阻电流采样
通过直流母线侧一个电阻,实现一个周期内两相电流的测量,第三相电流由Iu + Iv + Iw = 0 得到。
SVPWM开关VS直流母线电流
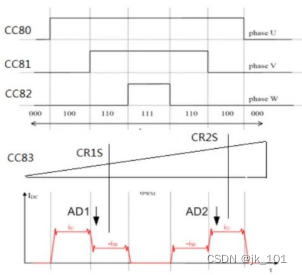
FOC的控制要素-相电流采样
单电阻ADC采样
SVPWM单直流母线电阻采样
CC83 ST信号用来硬件触发ADC

FOC的控制要素-桥臂电流采样
双/三电阻电流采样
桥臂电阻采样

电流采样方式选择

FOC的控制要素-闭环控制
速度和转矩闭环控制
内环电流环
矢量控制算法分别控制d-q轴电流,采用PI调节器
外环转速环
测量速度值与转速设定值比较,经PI调节器调节

无感FOC的控制原理
无感FOC的控制框图

电机转子位置好速度信息来自估算器而不是传感器。
无感FOC的控制核心--转子位置估算
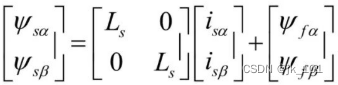
PMSM电机模型
静止坐标系下电压方程

![]()
![]()
无感FOC的控制核心--转子位置估算
角度位置、速度估算
反正切法
将计算得到的两相正交磁链直接反正切计算,得到转子角度
根据得到的角度,计算速度
PLL锁相环法
将两相正交磁链输入二阶跟踪系统,通过闭环控制得到转子转速和位置信息
转子位置估算PLL
PLL计算角度原理
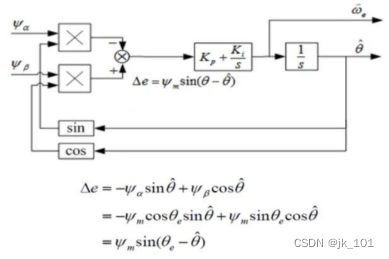
PLL优势
高频噪声有滤波作用
直接可以计算得到速度
角度突变较小(速度积分)
转子位置反正切估算
反正切法
角度位置计算

速度估算
对角位置进行差分计算,再进过一阶低通滤波器计算速度
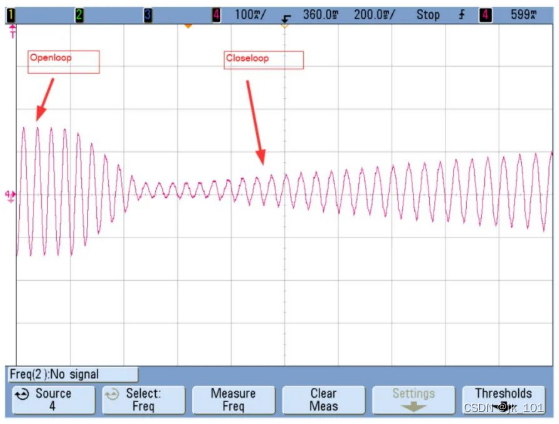
无感启动方式
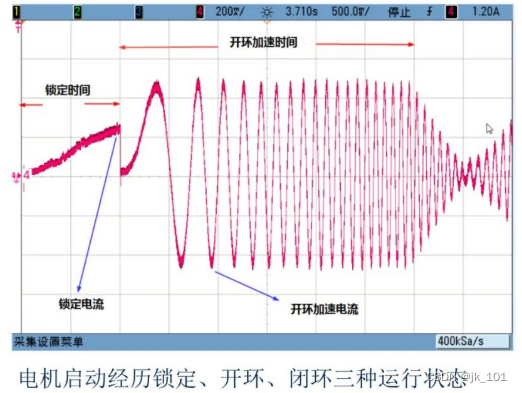
启动--角度切换

从开环切换到闭环是关键步骤
采用逐步切换减小切换的电流变化
实验波形
原文链接:无感FOC控制原理














 359
359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









