







本节主要介绍如何用Hough变换检测直线和圆
一:Hough变换检测直线
<1> 原始Hough变换
思想:先求出图像中每点的极坐标方程<如下图>,相交于一点的极坐标曲线的个数大于最小投票数,则将该点所对应的(p, r0)放入vector中,即得到一条直线,lines中存储的是极坐标方程的参数
注意hough变换要求输入的是包含一组点的二值图像。
代码:
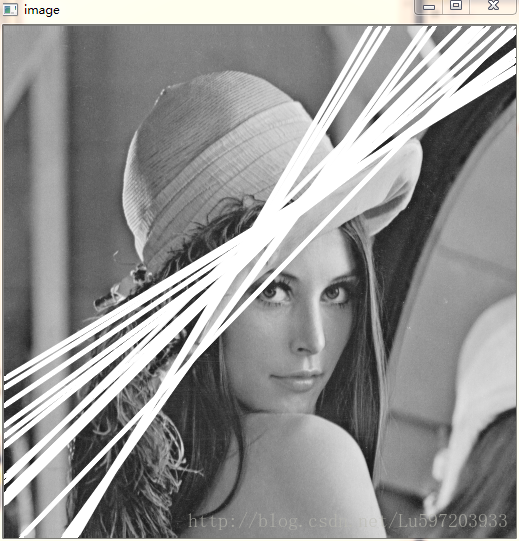
Canny(image, result, 150, 220);
vector<Vec2f> lines;
HoughLines(result, lines, 1, PI/180, 120);
for(size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0+ 1000*(-b));
pt1.y = cvRound(y0 + 1000*a);
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*a);
line(image, pt1, pt2, Scalar(255), 3, CV_AA);
}其中1和PI/180是直线搜索是的步进尺寸。
结果:
canny后得结果:
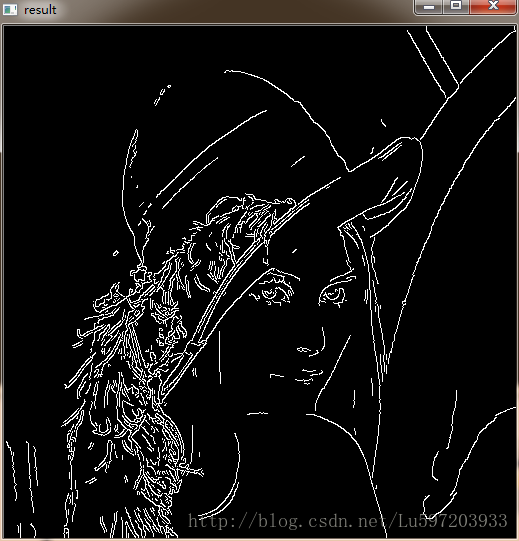
hough变换后:
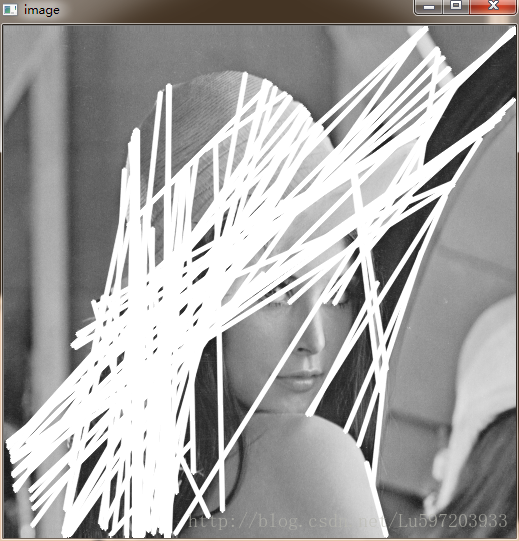
<2>概念Hough变换
思想:不是系统的进行扫描图像,而是随机挑选像素点,一旦累加器中某一项达到给定的最小值,那么扫描沿着对应直线的像素并移除所有经过的像素点。得到的可以说是一条线段
获得一条直线即将(x0, y0, x1, y1)放入vector中
代码:
vector<Vec4i> lines;
HoughLinesP(result, lines, 1, PI/180, 50, 50, 120);
for(size_t i = 0; i < lines.size(); i++)
{
Vec4i l = lines[i];
line(image, Point(l[0], l[1]), Point(l[2],l[3]),Scalar(255), 3, CV_AA);
}结果:
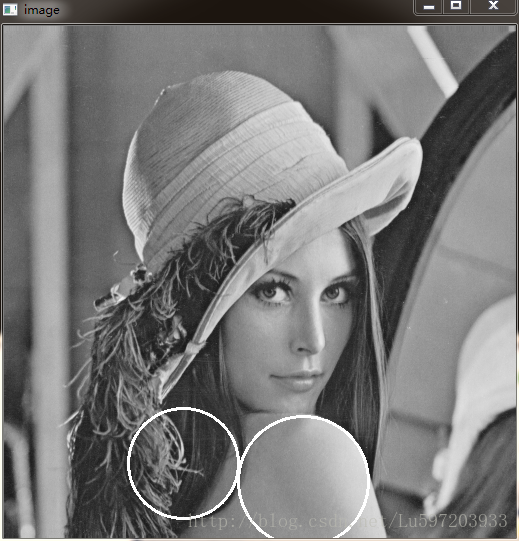
二:Hough变换检测圆
事实上,任何可以用参数方程表示的几何体都可尝试用hough变换进行检测。检测圆整合了canny检测和hough变换。
注意在hough圆变换前对图像进行平滑,这样可以减少可能引起误检测的图像噪点。
代码:
GaussianBlur(image, result, Size(5, 5), 1.5);
vector<Vec3f> circles;
HoughCircles(result, circles, CV_HOUGH_GRADIENT,
2, // 累加器的分辨率
50, // 两个圆之间的最小距离
200, // canny 高阀值
100, // 最小投票数
25, 100);
for(vector<Vec3f>::const_iterator itc = circles.begin(); itc != circles.end(); ++itc)
{
circle(image, Point((*itc)[0], (*itc)[1]), (*itc)[2], Scalar(255), 2);
}结果:















 8017
8017











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









