






永磁同步电机反步(backstepping)控制
1.采用非线性控制策略反步控制法,实现永磁同步电机系统的完全解耦,相比PI控制减少了系统调节参数,抗负载扰动能力明显提高;
2.提供算法对应的参考文献和仿真模型
购买赠送PMSM控制相关电子资料。
仿真模型纯手工搭建,不是从网络上复制得到。
仿真模型仅供学习参考
YID:4468676986513574
努力惜春华JW
标题:基于非线性控制策略的永磁同步电机反步控制方法研究
摘要:本文基于非线性控制策略提出了一种永磁同步电机反步控制方法,实现了系统的完全解耦并显著提高了抗负载扰动的能力。在文章中,我们详细介绍了反步控制法的基本原理,并提供了对应的参考文献和仿真模型,以便进一步研究和应用。值得注意的是,我们所提供的仿真模型是通过手工搭建,而非从网络上复制得到,仅供学习参考之用。
一、引言
永磁同步电机(PMSM)作为一种高效、稳定、可控性较强的电机,广泛应用于工业生产和家用电器领域。其具有响应快、效率高以及扭矩平稳等优点,在现代电力系统中扮演着重要的角色。然而,由于永磁同步电机本身的特性,如非线性、耦合等,使得针对其控制策略的研究变得尤为重要。
本文旨在采用非线性控制策略中的反步控制法,实现永磁同步电机控制系统的完全解耦,并提高其抗负载扰动的能力。相比传统的PI控制方法,反步控制法不仅能减少系统的调节参数,还能有效改善系统的鲁棒性和稳定性。
二、反步控制法的原理
反步控制法是一种基于非线性控制策略的方法,通过设计一个逐步分解的控制器,使得控制系统能够逐步地达到所期望的稳定状态。具体而言,反步控制法通过构造一个反步迭代算法,将原系统的非线性动力学模型分解为一系列的线性子系统,从而实现对系统状态的精确控制。
本文中,我们采用反步控制法来解耦永磁同步电机系统。首先,我们根据电机的动态特性,设计了一个适当的引导函数,以实现系统状态的控制。然后,通过反步迭代算法,将引导函数分解为一系列线性子系统,并利用每个子系统的输出来控制相应的状态变量。最后,将所有子系统的输出相加得到最终控制输出,从而实现对永磁同步电机系统的解耦控制。
三、仿真模型与结果分析
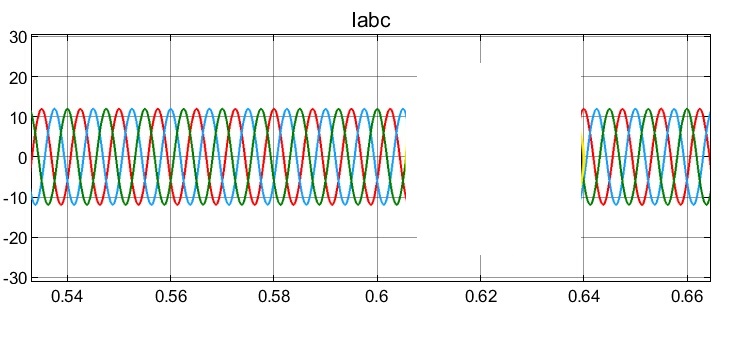
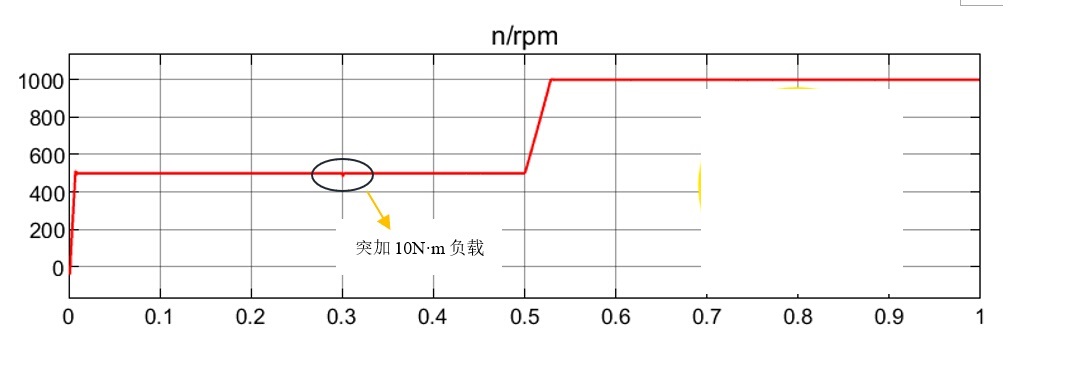
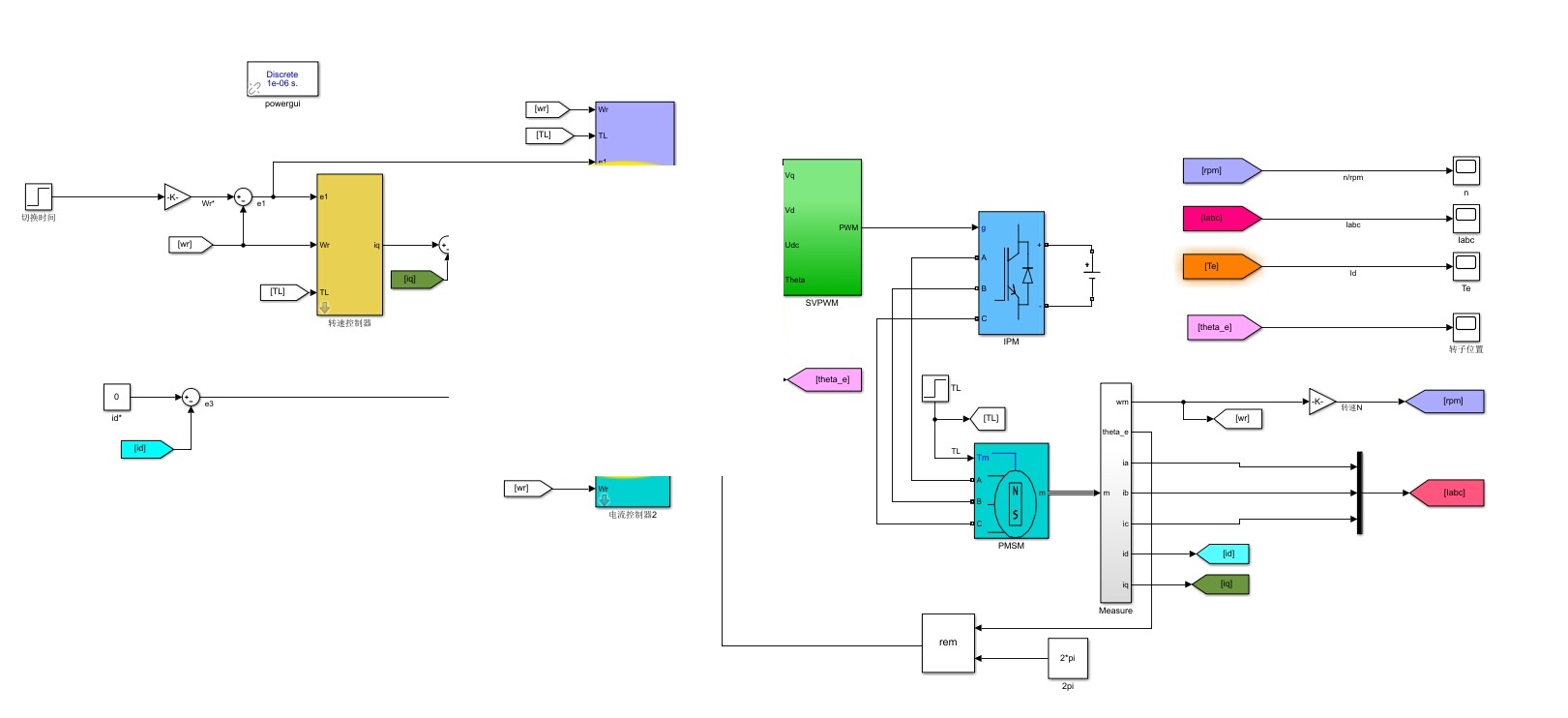
为了验证提出的反步控制方法的有效性,我们使用MATLAB/Simulink工具搭建了一个永磁同步电机系统的仿真模型。该模型考虑了电机的非线性特性、负载扰动以及系统的参数变化等因素,并通过仿真实验进行了详细的分析和评估。
在仿真实验中,我们比较了采用传统PI控制方法和所提出的反步控制方法的性能差异。结果显示,反步控制法
相关的代码,程序地址如下:http://matup.cn/676986513574.html
















 477
477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









