






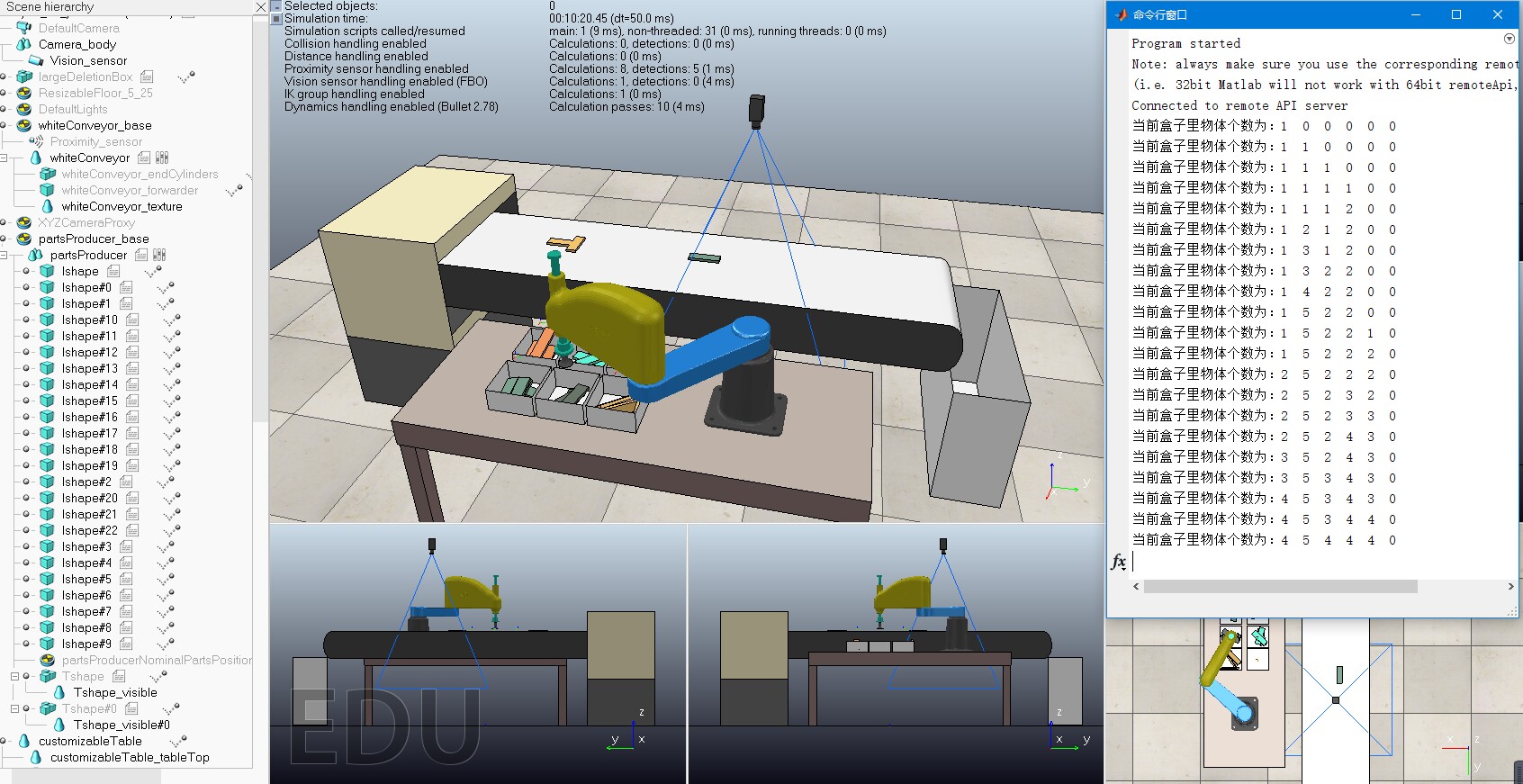
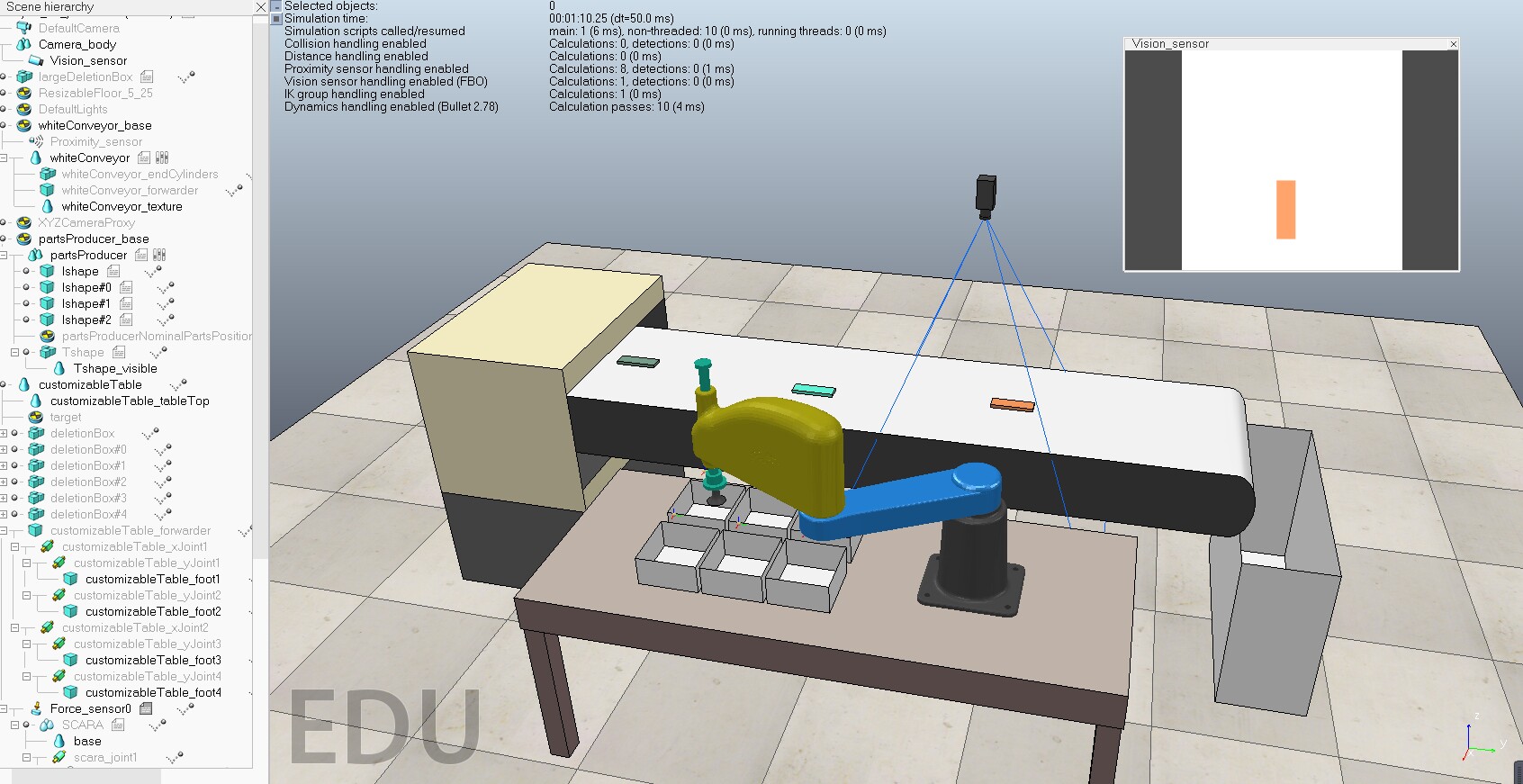
流水线自动分拣机器人仿真,vrep与matlab联合仿真,基于机器视觉技术进行自动分拣,采用scara型机械臂,按照不同的颜色与形状分拣,放入不同的盒子并统计数量。
仅供学习使用
基础太差的勿。
YID:37149629027431629
Huyoust
标题:基于V-REP与MATLAB联合仿真的流水线自动分拣机器人技术分析
摘要:本文基于V-REP与MATLAB联合仿真的流水线自动分拣机器人技术进行深入分析。该技术采用机器视觉技术,利用SCARA型机械臂,根据物体的颜色和形状进行自动分拣,并将其放入相应的盒子,并实时统计数量。文章从系统概述、流程原理、关键技术要点和实验结果展示四个方面详细阐述了该技术的原理、设计和实现过程,旨在为读者提供全面了解该技术的深入分析。
关键词:流水线自动分拣、机器人仿真、V-REP、MATLAB、机器视觉、SCARA机械臂
-
引言
随着物流行业的快速发展,自动化技术在分拣领域的应用越来越广泛。而流水线自动分拣机器人作为自动化分拣系统的关键组成部分之一,通过机器视觉技术和机械臂控制实现了高效、精准的物料分拣。本文将重点介绍基于V-REP与MATLAB联合仿真的流水线自动分拣机器人技术。 -
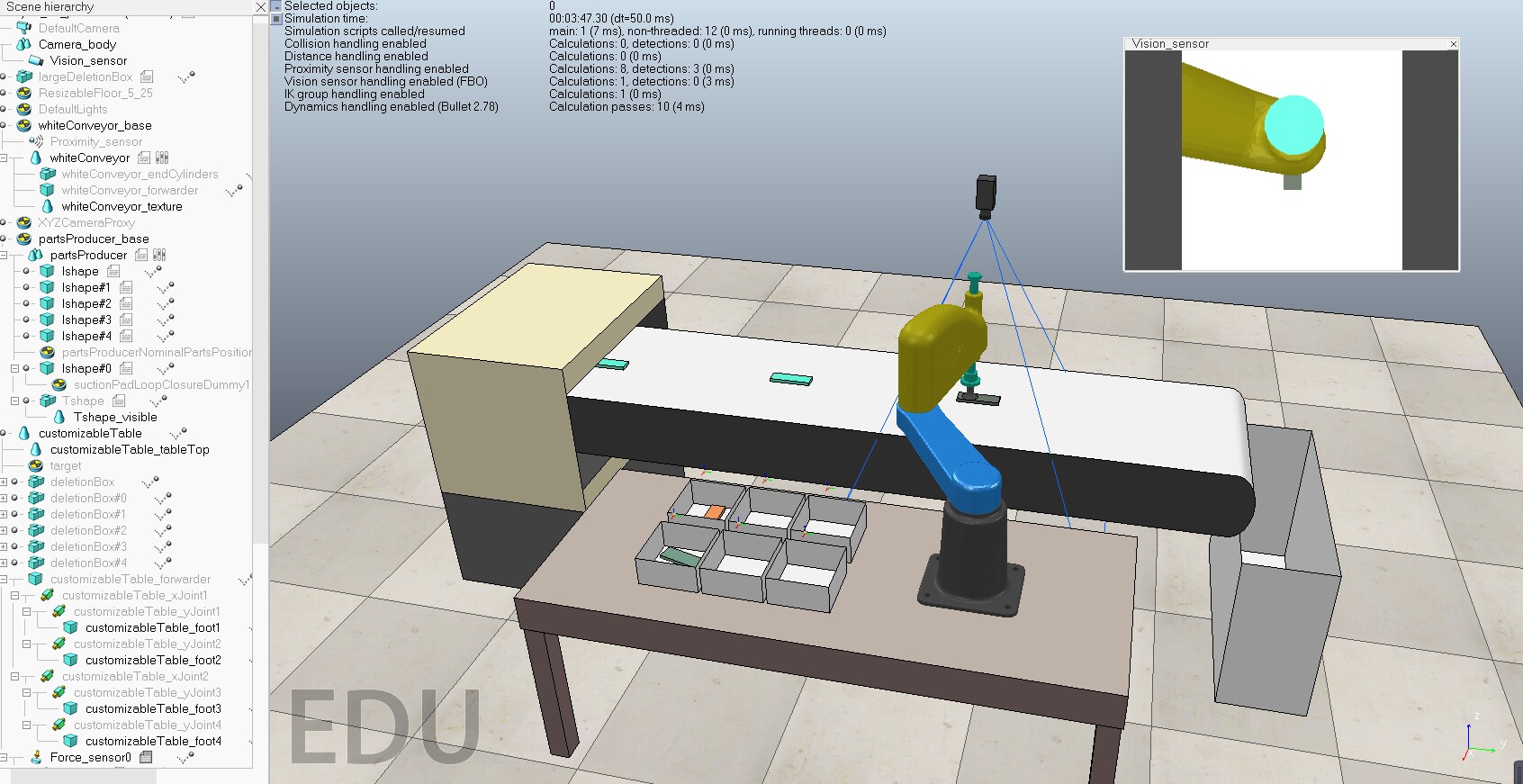
系统概述
流水线自动分拣机器人系统由硬件和软件两部分组成。硬件部分包括机械臂、摄像头、传感器等装置,通过接口与计算机进行连接。软件部分则通过V-REP仿真平台和MATLAB编程语言实现对机器人系统的控制和分析。 -
流程原理
本文主要介绍流水线自动分拣机器人的工作原理。首先,通过摄像头采集物体的图像,并利用图像处理算法提取物体的颜色和形状特征。然后,根据预设的分拣规则,通过MATLAB编程实现对特征的分析和判别,确定物体应该被放置在哪个盒子中。最后,通过控制机械臂的运动轨迹,将物体精准地放入相应的盒子中。 -
关键技术要点
4.1 机器视觉技术
机器视觉是流水线自动分拣机器人的核心技术之一。本文采用的机器视觉技术主要包括图像采集、图像处理和特征提取等方面。文章详细介绍了图像采集和处理算法,以及如何利用图像特征进行物体分类和分拣。
4.2 SCARA机械臂
SCARA型机械臂是流水线自动分拣机器人的关键执行器。本文介绍了其结构特点和运动学原理,并详细分析了控制算法。通过控制机械臂的精准运动,实现了对物体的抓取和放置。
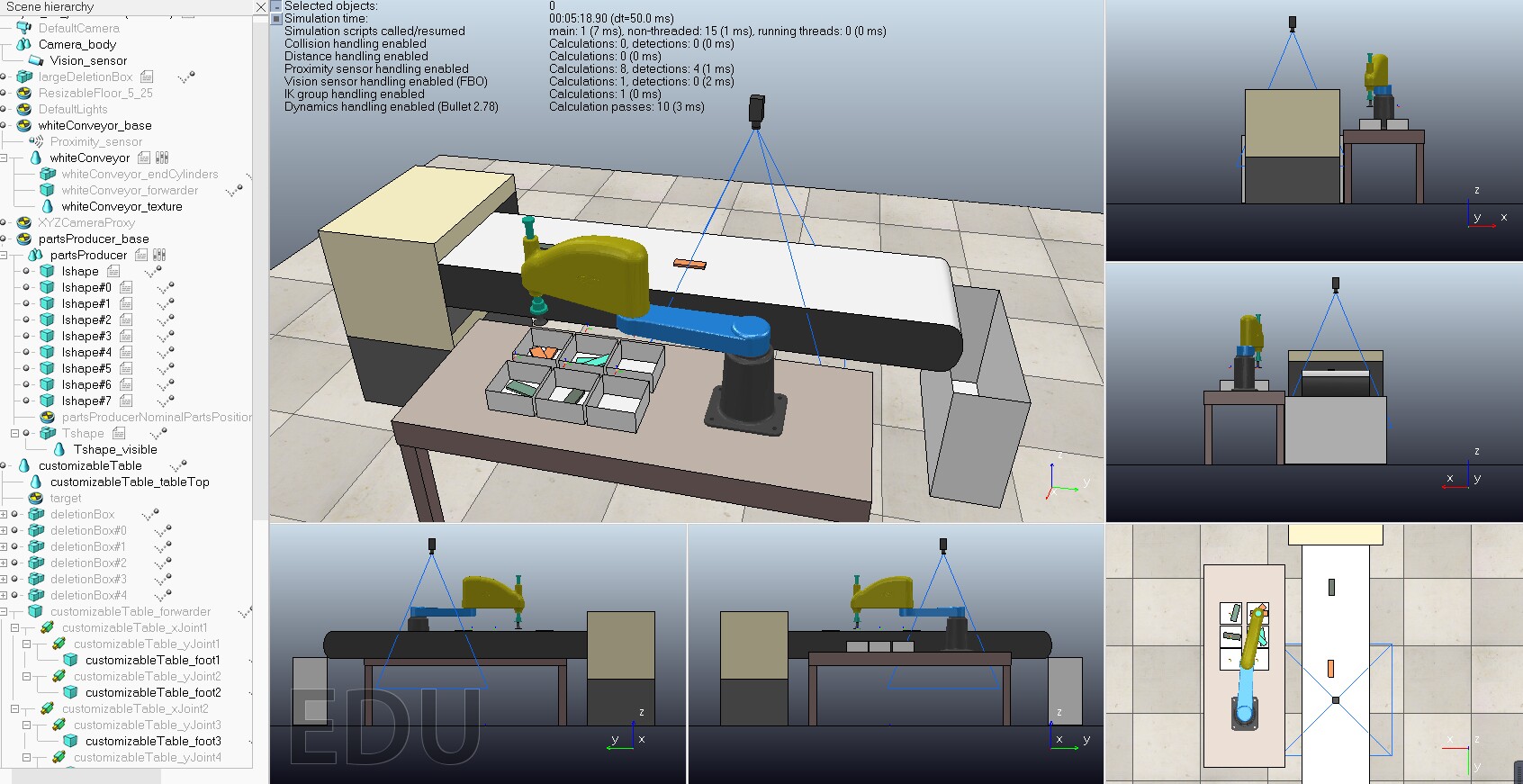
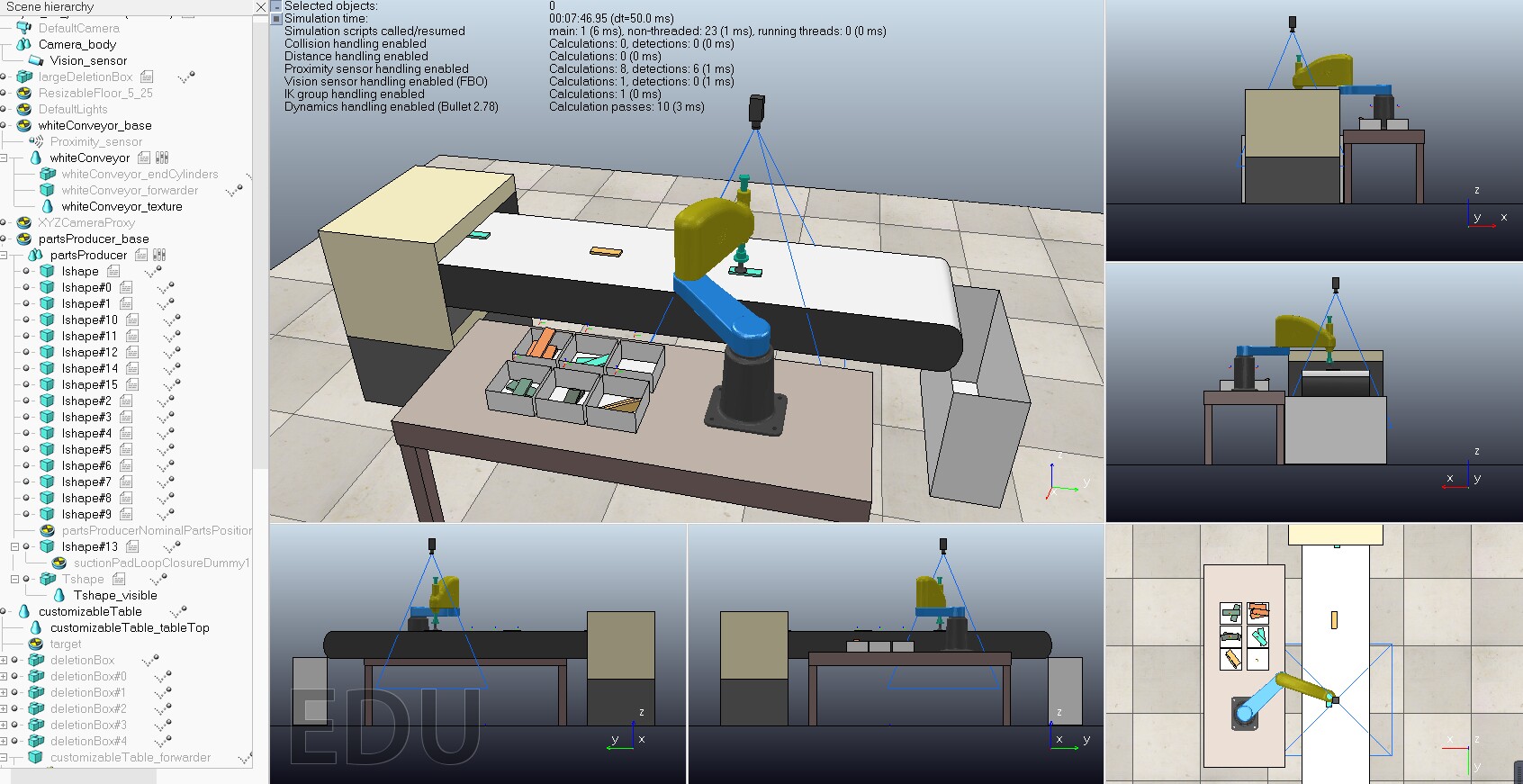
- 实验结果展示
为了验证流水线自动分拣机器人的性能,本文进行了一系列实验。通过V-REP仿真平台和MATLAB编程实现了实验环境的建立和控制,并测试了不同颜色和形状的物体分拣效果。实验结果表明,该系统在精准度和效率上都具备较高的水平。
结论
本文基于V-REP与MATLAB联合仿真的流水线自动分拣机器人技术进行了深入分析。通过机器视觉技术和SCARA机械臂的精准控制,该系统实现了对不同颜色和形状物体的自动分拣。实验结果表明,该技术在分拣效率和准确性上都具备较高的性能,具有广阔的应用前景。
参考文献
[1] 顾xx, 张xx. 基于机器视觉的物料分拣系统设计与实现[J]. 计算机工程与应用, 2020, XX(XX): XX-XX.
[2] 王xx, 李xx. 流水线自动分拣机器人控制系统研究与实现[J]. 机器人技术与应用, 2019, XX(XX): XX-XX.
以上相关代码,程序地址:http://wekup.cn/629027431629.html















 746
746











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









