






写这篇文章就是想给想做这个系统的朋友们提供一个可行的方案。
结构的设计参考这位博主的文章【自动化毕业设计】基于机械视觉控制的板球控制装置_automan05的博客-CSDN博客
稍微有些不同的是我用的是普通的高清摄像头,图像处理用的MATLAB,系统的一些其它功能也是通过MATLAB的GUI实现的。
最后的实现效果如下图所示,图像维持在30帧是可以的,整体实现的效果也还行。
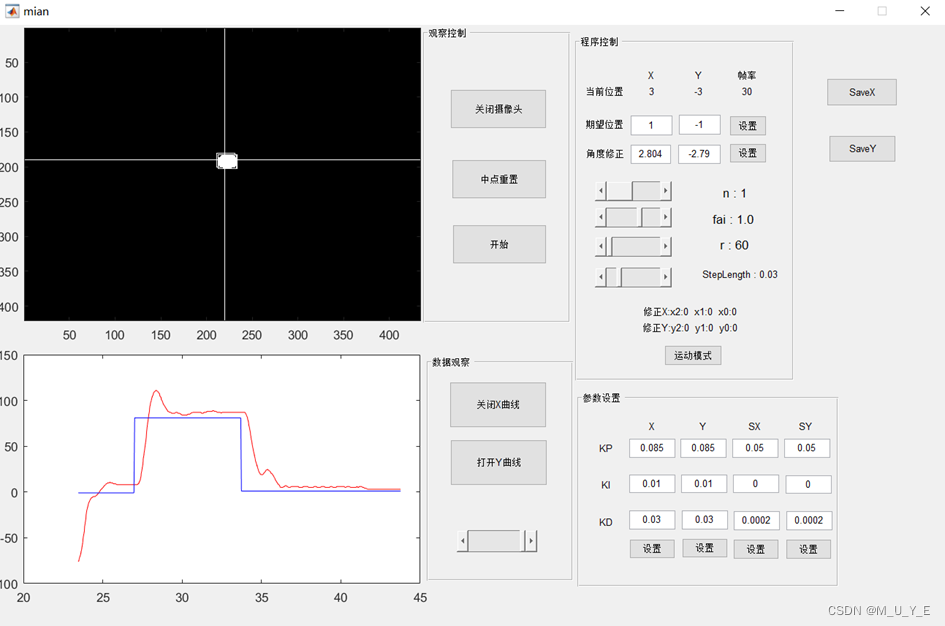
因为MATLAB有很多图像处理的函数,而且用的是白球黑板,用MATLAB在板上找出小球并不是啥难事,基本上调用个边缘检测的函数差不多就能定位到位置了,比较难的是GUI的设计。早期因为一些其它问题,测试摄像头的时候只有十多帧,所以PID的计算是被放到了STM32处理,然后因为有一些系统参数的交互导致代码写起来要考虑的问题多了一些,如果不是必要的话PID等其它一些计算直接放到MATLAB计算就行,一方面整体代码写起来简单很多,另一方面数据调用和修改也方便。
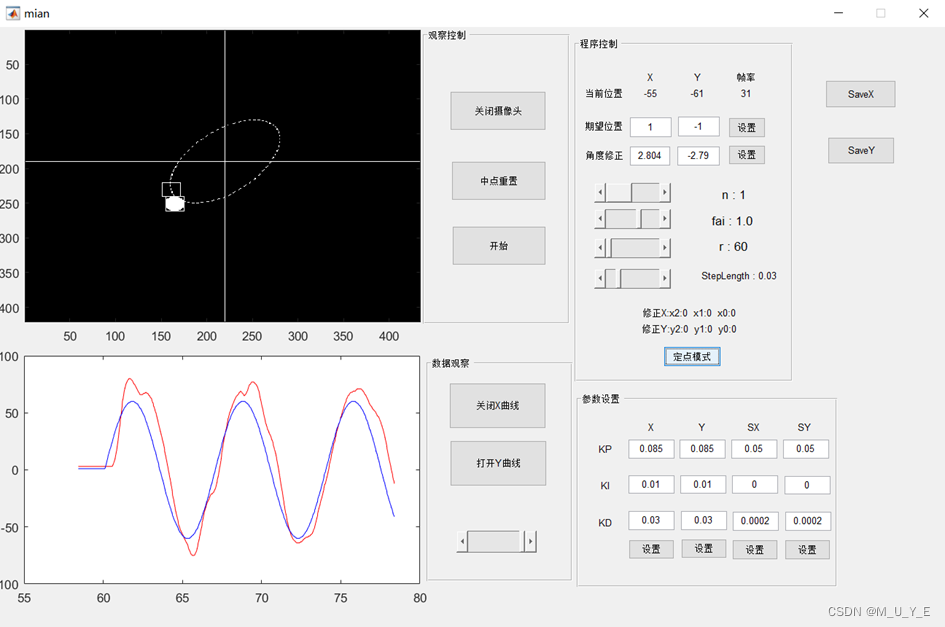
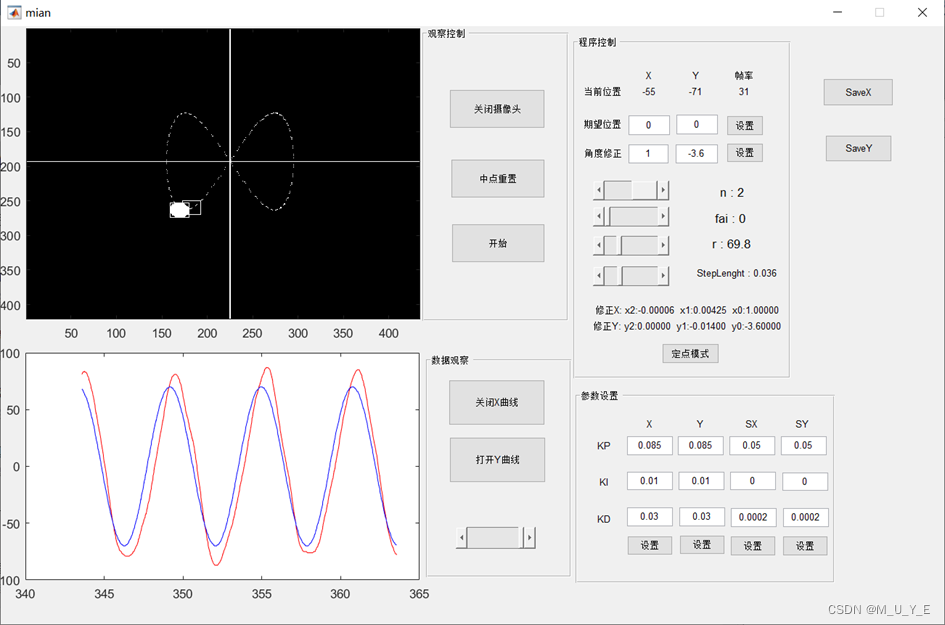
平衡算法用的是串行PID,一个位置环一个速度环,轨迹走线参考了李萨如图形的参数方程,这两种功能实现起来都不难,需要注意的是把轨迹显示出来,这个就要自己摸索摸索函数和图像位置的映射关系了。
最后数据显示就是调用plot函数就行,用一个变量记录一定时间内小球位置,满了就把后面的位置数据挤出去就行,隔一段时间就再调用plot刷新显示就行,如果每一帧都刷新的话系统好像有点不稳定,又或许是我笔记本太拉的原因。
代码就不放了,写得不规范而且没注释,太难看了,有时候自己都想不起来这段东西是干嘛的。

















 8991
8991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









