







本博客仅个人总结,如有错误之处欢迎指正
第一阶段:(检测2D关键点)
 pvnet:
pvnet:
1.语义分割(生成对象标签);
2.生成单位向量(方向为每个像素指向预测的关键点)公式(1)

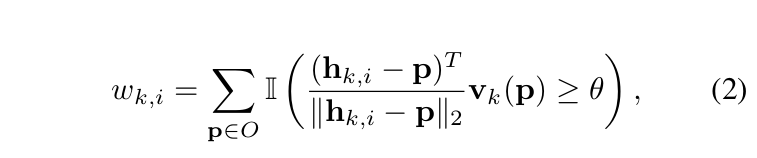
3.关键点的假设
基于上面两点,随机选取两像素,取它俩单位向量的交点作为关键点的假设,重复此步骤生成N关键点的假设,最后对某一对象的所有像素进行评分,选出最可能的关键点,定义如公式(2)
先求每个假设关键点的均值(公式3)和协方差(公式4),用于后面的位姿求解
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















08-11
 1214
1214
1214
08-13
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









