






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
无人机自动驾驶仪是一种用于控制和导航无人机的关键设备,它通过一系列传感器、计算机视觉技术、机器学习算法和实时数据处理来实现飞行任务的自主执行。无人机自动驾驶仪通常配备了多种传感器,包括全球定位系统(GPS)、惯性测量单元(IMU)、气压计、雷达、摄像头和激光雷达等。这些传感器提供了关于无人机当前位置、速度、姿态、环境条件等方面的数据。自动驾驶仪将来自各种传感器的数据进行融合和处理,以获取对无人机周围环境的准确认知。这种数据融合可以通过传统的滤波和估计方法,也可以利用深度学习等技术实现对环境的感知和理解。自动驾驶仪与地面控制站之间通过通信链路进行数据交换和指令传递,地面操作人员可以通过地面控制站实时监控无人机的状态、调整任务参数、下达飞行指令等。无人机自动驾驶仪作为无人机系统中的核心部件,扮演着实现无人机自主飞行任务的关键角色。通过感知环境、规划路径、控制飞行等功能,它使得无人机能够在各种复杂环境下安全、高效地执行各类飞行任务,广泛应用于军事、民用、科研等领域。
📚2 运行结果
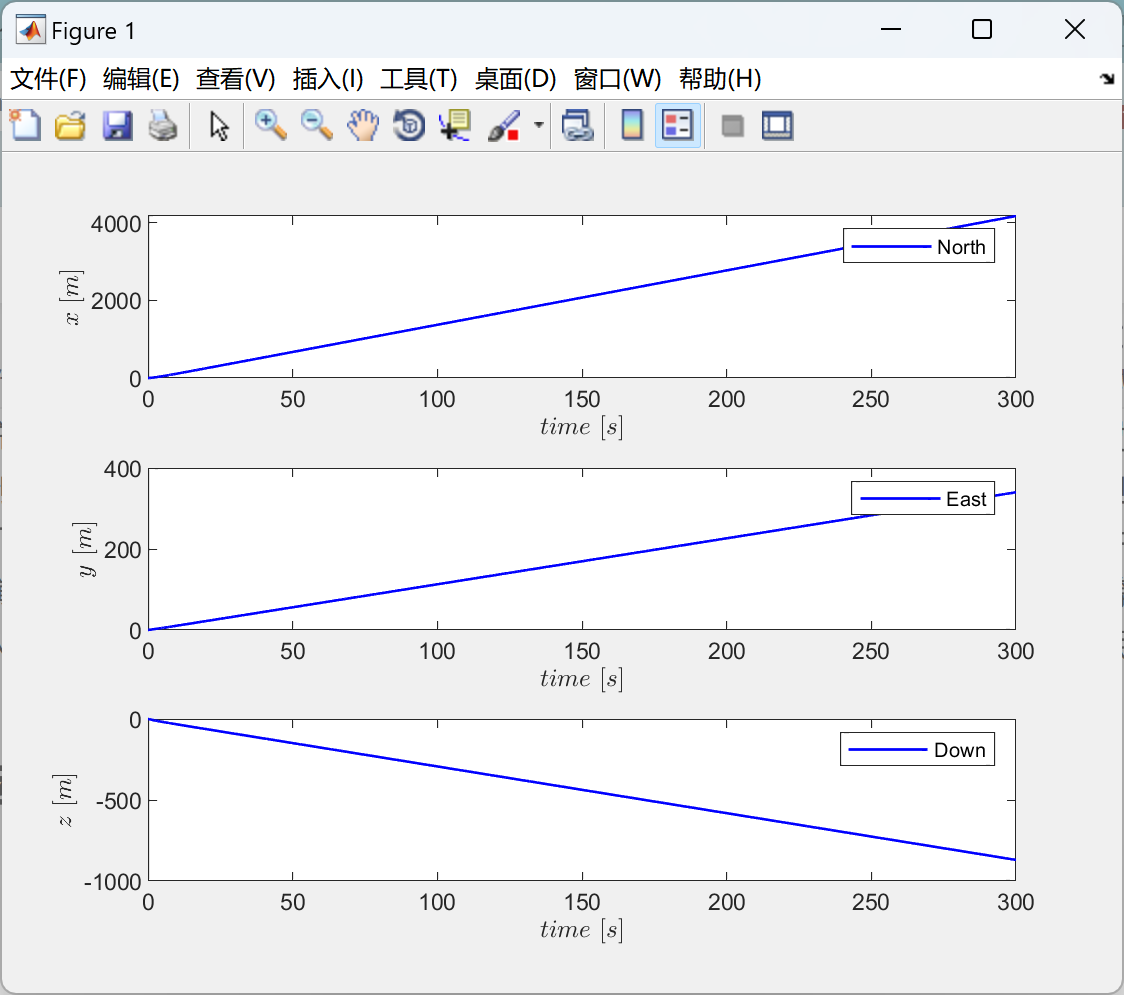
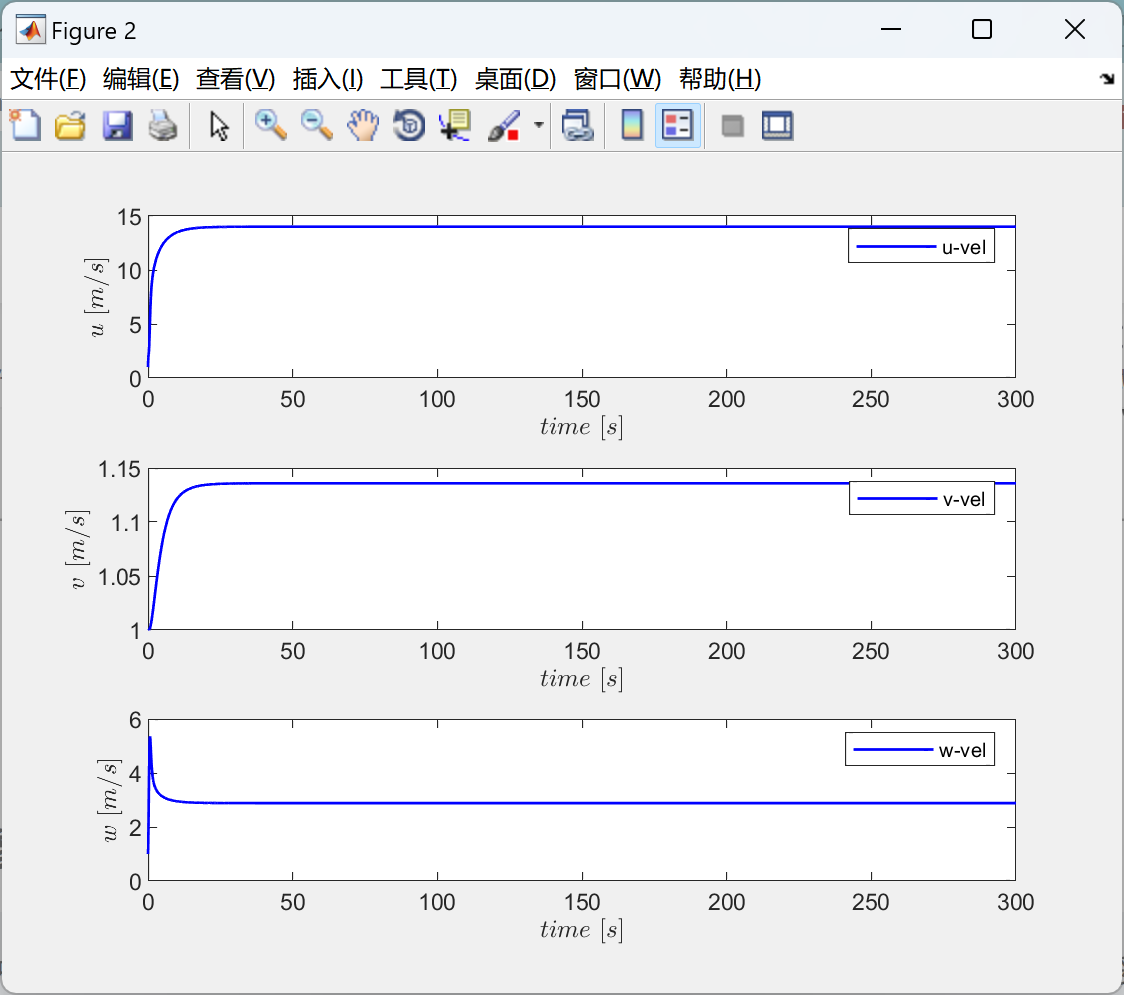
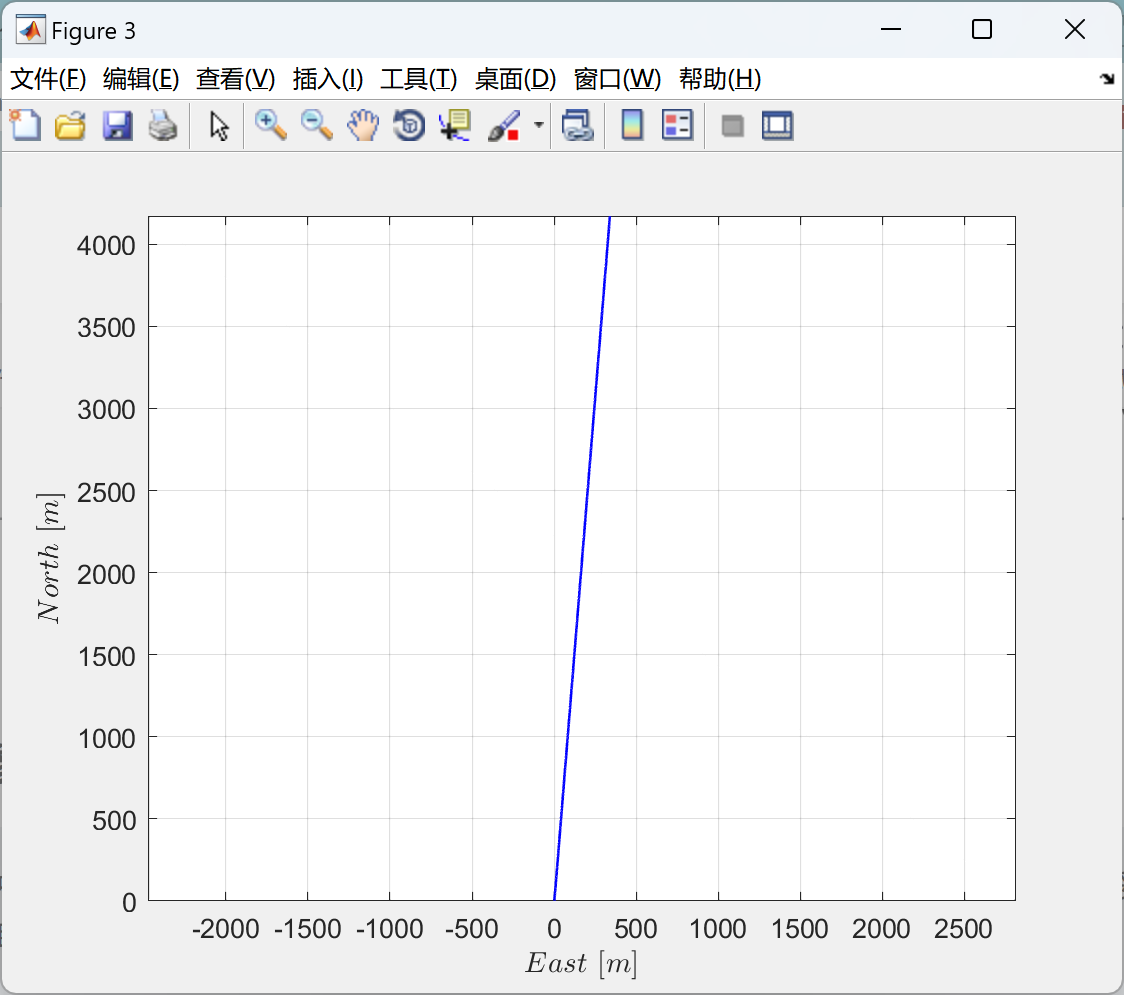
主函数办法代码:
close all;
clear all;
clc;
%% Initializations and constants
h = 0.05; % sampling time [s]
N = 6000; % no. of samples
flag = 1; % 1: nonlinear AOA, 0: linear AOA
% UAV parameters
b = 2.1; % wing span (m)
l = 0.79; % fuselage length (m)
m = 2.5; % mass (kg)
S = 0.8; % wing area (m2)
c = 0.357; % mean aerodynamic chord (m)
g = 9.81;
rho = 1.225; % air density (kg/m3)
% Inertia matrix
Ix = 1.229; Iy = 0.1702; Iz = 0.8808;
Ixy = 0; Ixz = 0.9343; Iyz = 0; % ref Gryte thesis
% I = [Ix, -Ixy, -Ixz;
% -Ixy, Iy, -Iyz;
% -Ixz, -Iyz, Iz];
% Inertia relationships
L = Ix*Iz-Ixz^2;
L1 = (Ixz*(Ix-Iz+Iz))/L;
L2 = (Iz*(Iz-Iy)+Ixz^2)/L;
L3 = Iz/L;
L4 = Ixz/L;
L5 = (Iz-Ix)/Iy;
L6 = Ixz/Iy;
L7 = ((Ix-Iy)*Ix+Ixz^2)/L;
L8 = Ix/L;
% Initialize states
pos = [0 0 0]'; % position [x y z] in NED
vel = [1 1 1]'; % velocity [u v w] in BODY
ang = [0 0 0]'; % euler angles [phi theta psi] in VEHICLE
angrate = [0 0 0]'; % angular rates [p q r] in BODY
% F = [1 1 1]'; % forces [X Y Z]
% M = [0 0 0]'; % moments [L M N]
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]李建波.基于无人机自动驾驶技术的前期选址选线[J].机电信息,2024(05):90-92.DOI:10.19514/j.cnki.cn32-1628/tm.2024.05.023.
[2]张瑞麟. 基于无人机自动驾驶的目标检测与跟踪研究[D].哈尔滨理工大学,2024.DOI:10.27063/d.cnki.ghlgu.2023.000998.















 45
45











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









