






✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🔥 内容介绍
航天器交会作为航天领域一项关键技术,在空间站维护、在轨服务、深空探测等方面具有重要的应用价值。传统的航天器交会控制方法,例如比例-积分-微分(PID)控制、线性二次调节器(LQR)等,往往依赖于精确的动力学模型,且难以有效处理系统约束和非线性。随着多航天器协同任务的日益增多,单航天器控制方法的局限性日益凸显。因此,发展一种能够有效处理系统约束、适应非线性动力学、并支持多航天器协同交会的控制策略显得尤为重要。分布式模型预测控制(Distributed Model Predictive Control, DMPC)应运而生,为解决上述挑战提供了一种极具潜力的方案。本文将深入探讨DMPC在航天器交会控制中的应用,分析其优势与挑战,并展望未来的发展趋势。
DMPC是一种基于模型预测控制(MPC)的控制框架,适用于由多个子系统组成的复杂系统。与集中式MPC相比,DMPC将整体优化问题分解为多个局部优化问题,每个子系统根据自身的状态、模型以及与其他子系统的交互信息,独立进行预测和控制。通过子系统间的协调机制,DMPC能够实现全局最优或近似最优的控制性能。对于航天器交会问题,可以将每个航天器视为一个独立的子系统,利用DMPC实现多航天器的协同控制。
DMPC在航天器交会控制中的优势主要体现在以下几个方面:
- 鲁棒性强:
航天器交会过程面临着诸多不确定性因素,例如动力学模型误差、外部扰动、传感器噪声等。DMPC通过滚动优化策略,能够不断根据新的测量信息修正预测模型,从而提高系统的鲁棒性,有效抑制不确定性因素的影响。每个子系统在局部进行优化,也降低了全局模型误差对控制性能的影响。
- 可扩展性好:
随着任务规模的扩大,需要参与交会的航天器数量不断增加。DMPC能够很好地适应这种变化,只需将新的航天器作为新的子系统加入到控制框架中,无需对原有控制架构进行大幅修改。这种可扩展性是集中式MPC难以比拟的。
- 计算复杂度低:
集中式MPC需要求解一个维度极高的全局优化问题,计算量随着子系统数量的增加呈指数级增长。DMPC将全局优化问题分解为多个局部优化问题,每个子系统只需求解一个维度较低的优化问题,从而大大降低了计算复杂度。这种优势对于计算资源有限的航天器而言尤为重要。
- 适应分布式架构:
现代航天器系统通常采用分布式架构,各个子系统之间通过网络进行通信。DMPC与这种分布式架构天然契合,每个航天器可以独立进行控制,通过网络与其他航天器交换信息,无需依赖于中心控制单元,增强了系统的灵活性和容错性。
- 便于处理约束:
航天器交会过程中存在着诸多约束,例如燃料消耗约束、姿态角约束、碰撞避免约束等。MPC能够显式地处理这些约束,确保控制过程满足任务要求。DMPC可以将这些约束分配到各个子系统,并利用子系统间的协调机制保证全局约束的满足。
然而,DMPC在航天器交会控制中也面临着一些挑战:
- 协调机制设计:
子系统间的协调机制是DMPC的关键。设计合适的协调机制,保证全局目标的最优性或近似最优性,是一个具有挑战性的问题。常见的协调机制包括博弈论方法、迭代优化方法等。如何选择合适的协调机制,并保证其收敛性,需要根据具体的任务需求进行仔细分析。
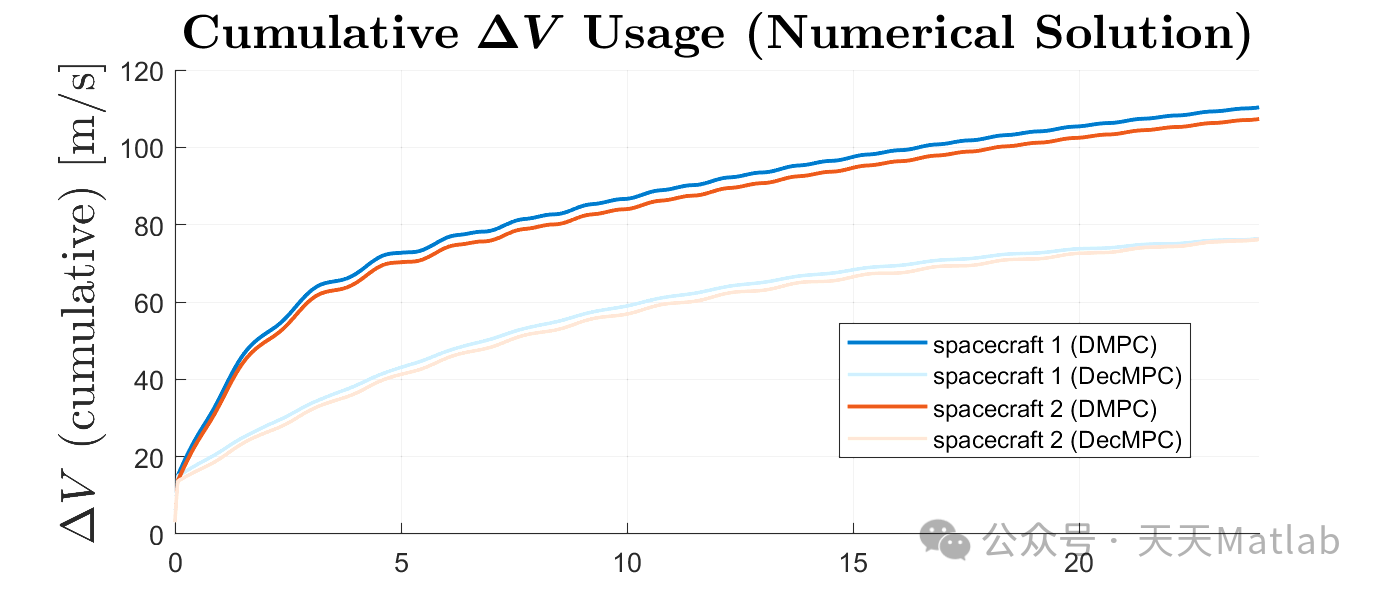
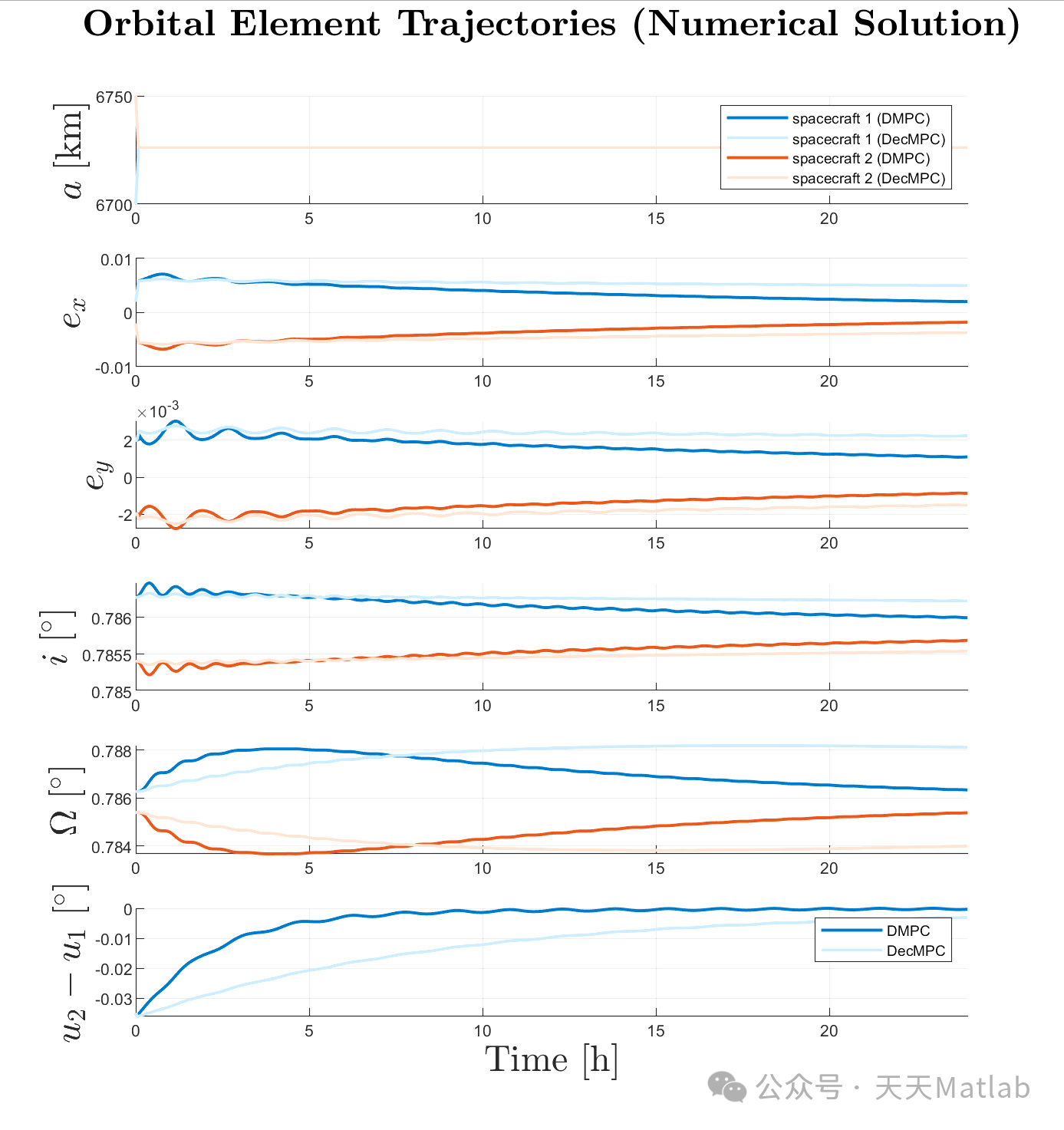
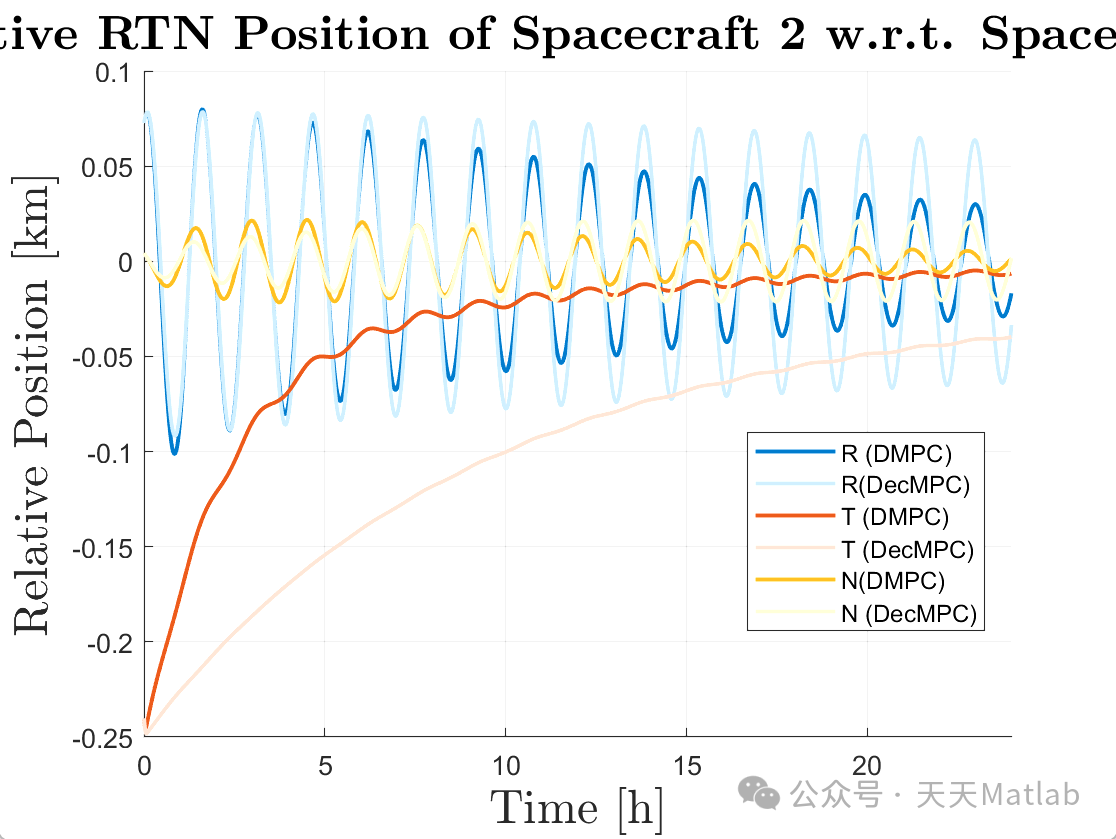
⛳️ 运行结果
🔗 参考文献
📣 部分代码
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🏆团队擅长辅导定制多种科研领域MATLAB仿真,助力科研梦:
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
2.10 DBN深度置信网络时序、回归预测和分类
2.11 FNN模糊神经网络时序、回归预测
2.12 RF随机森林时序、回归预测和分类
2.13 BLS宽度学习时序、回归预测和分类
2.14 PNN脉冲神经网络分类
2.15 模糊小波神经网络预测和分类
2.16 时序、回归预测和分类
2.17 时序、回归预测预测和分类
2.18 XGBOOST集成学习时序、回归预测预测和分类
2.19 Transform各类组合时序、回归预测预测和分类
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
🌈图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
🌈 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻
🌈 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划
🌈 通信方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配
🌈 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理+传输+分析+去噪、数字信号调制、误码率、信号估计、DTMF、信号检测
🌈电力系统方面
微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统(BMS)SOC/SOH估算(粒子滤波/卡尔曼滤波)、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进(扰动观察法/电导增量法)
🌈 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长 金属腐蚀
🌈 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合、SOC估计、阵列优化、NLOS识别
🌈 车间调度
零等待流水车间调度问题NWFSP 、 置换流水车间调度问题PFSP、 混合流水车间调度问题HFSP 、零空闲流水车间调度问题NIFSP、分布式置换流水车间调度问题 DPFSP、阻塞流水车间调度问题BFSP
👇

















 3
3

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









