







5.1.2 Towards the Development of a Robotic Transcatheter Delivery System for Mitral Valve Implant
Authors: Namrata Nayar*, Seokhwan Jeong and Jaydev P. Desai, Fellow IEEE
Source: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)

摘要:二尖瓣反流是由心室功能障碍或二尖瓣解剖异常引起的最常见的心脏疾病之一。 二尖瓣反流的基本治疗方法是通过开胸手术修复/替换二尖瓣,这种方法风险较大,恢复时间较长,或者通过微创手术方法,这种方法存在重大挑战和限制。通过经导管的方法,二尖瓣植入物可以最小侵入性地直接送达二尖瓣,并夹紧在瓣叶上以减轻或预防反流。 然而,这个过程需要在有限的空间内精细操作导管,仍然是一个具有挑战性的问题。 这项工作提出了一个机器人可操纵的导管设计,用于处理二尖瓣反流的经导管手术。 所提出的导管由两个弯曲关节、一个扭转关节和一个植入物输送模块组成。 为每个关节设计推导了运动学模型,并与实验结果进行了比较。 最后,在一个心脏模型中实验验证了所提出的导管的可行性。在这个演示中,弯曲关节被激活了75°,扭转关节被激活了90°,植入物被推出1.8毫米以完成植入。
背景:二尖瓣反流(MR)是美国最常见的瓣膜性心脏病(VHD)形式,由于血液泄漏(即从左心室到左心房的逆流)导致,每当左心室收缩时会发生。心脏瓣膜确保血液单向流动,并在收缩和舒张期间防止逆流。 二尖瓣反流导致左心房压力增加,左心室扩张,并逐渐导致充血性心力衰竭和死亡。 它是由心室功能障碍或二尖瓣解剖异常引起的。
在过去的20年中,随着影像学、外科器械和机器人技术的进步,微创二尖瓣手术的方法已经取得了突破性进展,以减少术后并发症、术后疼痛和恢复到正常活动所需的时间。近期,通过经皮穿刺手术进行的经导管二尖瓣修复/置换方法已经用于MR治疗,其中涉及在二尖瓣上植入一个“夹子”。 一个例子是FDA批准的使用MitraClip系统的经导管介入。 可操纵的导管通过传递夹子并通过夹紧瓣叶来重塑二尖瓣。 在这个过程中,临床医生通过弯曲/扭转远端部分来手动导航导管。 尽管这种经导管方法正在得到推广,但导管尖端的可操纵性,即不会对周围解剖结构产生不良影响仍然是一个临床挑战。 目前,大多数现成的导管都是手动操作的,并且具有有限的运动范围;它的操作很大程度上依赖于操作者的技能和经验。 通过手动和/或外部驱动器的可操纵性使操作者能够改善导管的操纵性和进入目标区域的便利性。
为了在经导管途径下精确植入MR治疗中的夹子,夹子必须根据二尖瓣的形状进行正确定位。 因此,扭转和弯曲能力是成功部署夹子在二尖瓣叶片上的关键因素。 商业上可用的机器人导管已经显示出较差的扭矩传输效率,并且远端尖端没有直接的扭转能力。MitraClip©提供夹子的旋转运动,但是通过长扭矩传输线远程操作,可能无法直接控制夹子。
机器人设计和运动学
为了在二尖瓣上实现植入物放置,需要通过穿刺房间隔的经房间隔穿刺术将含有植入物的导管引入左心房,这是一种成熟的临床操作。 一旦导管被引入并操纵到正确的方向,位于末端的植入物通过二尖瓣开口推入并通过精细操作夹住二尖瓣叶片。
为了实施这个程序,本文提出了一个可操纵的导管,由四个腱驱动单元组成:两个弯曲关节,一个扭转关节和一个植入物输送模块(IDM)。 每个弯曲关节由两个对抗性腱控制,两个弯曲关节设计为低耦合。 扭转关节直接提供扭转运动给IDM,因此比目前临床实践中背部操作的扭转机制具有更好的操纵性。 此外,该关节设计为具有宽阔的中空腔以有效容纳植入物,从而减少机器人的长度并保护植入物免受周围环境的影响。
A. 弯曲关节的设计
弯曲关节由一个顶盘和一个底盘组成,它们通过弹簧连接(见图1)。

图1:弯曲接头示意图:(a)驱动状态,(b)接头横截面。
B. 扭转关节的设计
为了实现植入物的扭转运动与二尖瓣叶片对齐,我们设计了一种新型的扭转机构。 扭转关节由三个部件组成:滑块、中间轮和底座,如图2(a)所示。 底座被刚性地固定在弯曲关节的顶部盘(见图1(a))的末端。 滑块和底座之间由三根柔性和超弹性的Nitinol线圈分开,环绕在周向上 120°的位置。 至少需要三根线圈,以保持滑块始终与底座平行。 此外,三根附着在滑块上的尼龙腱,每 120°一根,绕过中间轮并穿过底座上的孔洞,最终到达中空腔。 当这些腱一起拉紧时,滑块向下移动,迫使Nitinol线圈弯曲(见图2(b)),从而导致滑块相对于底座的同时旋转和平移,就像螺旋运动一样。 在这里,中
间轮可以自由地相对于底座旋转,因此,滑块通过棱柱关节与中间轮耦合,使中间轮产生纯粹的旋转运动。 同时,由于中间轮的中空腔(图2(c))的内脊与植入物支架中的凹槽相配合,实现与植入物持有器的旋转运动最终耦合,并将其旋转到目标方向。

图2:扭接头示意图:(a)3个单元静止(原位置),(b)尼龙腱拉时屈曲,使滑块平移和旋转,(c)俯视图。

图3:驱动状态下的(a)扭转关节,以及具有基本尺寸和几何关系的镍钛诺肌腱的(b)示意图。

图4:扭转关节的俯视图,以显示角位移和绷紧的尼龙肌腱的示意图。
C. 植入物的输送系统
递送系统包括:3D打印植入物支架、二尖瓣植入物、滚珠轴承和外径为0.889 mm的单向切口镍钛诺管(美国加利福尼亚,美国)。镍钛诺管是激光切割的(Optec Laser S. A.,比利时)来创建凹槽,这增加了管和整个装配的顺应性。

图5: (a)植入体通过肌腱操作和(b)整个植入体输送模块闭合。
D.机器人原型机
如图6 (a)所示,可操纵导管的外部部分由两个弯曲关节和一个扭转关节组成。这三个部分是3D打印的。整个机组的最大直径为10毫米。为了组装扭力接头,使用了三根长度为20 mm、外径(OD)为200µm的镍钛诺线。采用OD值为200µm的尼龙肌腱来驱动弯曲关节和扭转关节。来自扭转接头的三个尼龙肌腱连接在一个聚氯乙烯管上,与镍钛诺管同心对齐(见图5),间隔120◦。为了组装弯曲接头,我们将尼龙腱固定在顶部圆盘上,并通过底部圆盘的通道,到达中空腔,最大限度地减少两个弯曲接头之间的耦合。我们也使用聚四氟乙烯管,以确保肌腱通过通道的顺利运动。其他重要参数包括S、r、δ、Ri和l,分别为12 mm、3.2 mm、1 mm、3.2 mm和18 mm。
六根腱从植入物支架穿过Nitinol管并操纵二尖瓣夹。 固定十根腱中的四根(图5(a)中的两根绿色和黄色腱),拉动/释放另外两根(图5(a)中的红色腱)打开/关闭植入物。 由于滚珠轴承,Nitinol管的运动与由扭转接头驱动的植入物支架的旋转运动解耦(从而使管的凹槽与弯曲方向对齐成为可能)。

图6: (a)组装导管,包括IDM、(b)植入物模块缩回并推出,©扭转关节操纵植入物支架的角度,(d)二尖瓣夹打开并关闭。
实验
实验由三个部分组成: 1)估计尼龙肌腱的刚度,2)3d打印弹簧的横向刚度,3)比较弯曲角度与肌腱位移之间关系的理论和实验值。

图7:实验装置。
在第一个实验中,尼龙肌腱的一端连接到一个刚性支架上,另一端连接到一个由直线电机驱动的力传感器(MDB-5,传感器技术)上。位移由电机的编码器信号得到,力传感器提供的力值。实验结果如图8(a-i)所示。通过计算加载阶段最佳拟合线的斜率,计算出尼龙肌腱的刚度kn为1.45 N/mm。
在第二个实验中,将弯曲关节连接到一个3d打印支架上,其中一个近端尼龙肌腱连接到弯曲关节上,并由直线电机拉动。使用电磁跟踪器记录了顶盘的弯曲角度。图8(a-ii)为实验结果。计算出弹簧的横向刚度Ks,得到0.076N/度。图8(a-iii)(上)描述了当近端弯曲关节保持静止时,远端关节的横向弯曲。
在最后一个实验中,得到了肌腱位移与弯曲角度之间的合成图(见图8(a-iv))。理论值(黑色虚线)用理论计算与之前实验中测量的kn和ks。理论模型与实验数据比较较好。在上述实验中,收集了超过5-6个循环的结果,以确保弯曲接头的可重复性。然而,每个驱动周期持续10秒,以确保它恢复到初始状态。

图8:实验结果:(a-i)尼龙肌腱刚度试验,(a-ii)弯曲关节侧向刚度试验(a-i)近端关节角分别为0◦和45◦时不同驱动阶段的图像,(a-iv)弯曲关节弯曲角与肌腱位移关系的理论和实验结果比较。当近端角保持在(bi)0◦和(bii)45◦时,弯曲接头之间的耦合。(c-i)不同驱动阶段的扭转关节图像:侧视图和俯视图,(c-ii)扭转关节旋转角度与肌腱位移关系的理论模型和实验结果的比较。
为了将夹子放置在目标瓣叶上,采取了以下步骤:1)将远端弯曲关节弯曲 45°,然后将近端弯曲关节弯曲 30°,2)通过控制有刻槽的Nitinol管推出植入物支架,3)通过激活扭转关节将植入物支架旋转,使其与二尖瓣瓣叶对齐,4)进一步推动植入物支架以将植入物放置在瓣叶下方,5)如图5(a)所示打开夹子,6)通过精细操作将夹子定位在瓣叶上夹紧。前两个关节的弯曲由线性电机驱动,其余步骤由手动完成。首先,弯曲关节被 75°激活,然后扭转关节被90°激活,最后植入物被推出1.8毫米以输送植入物。这个演示展示了机器人经导管输送植入物的设计的可行性。
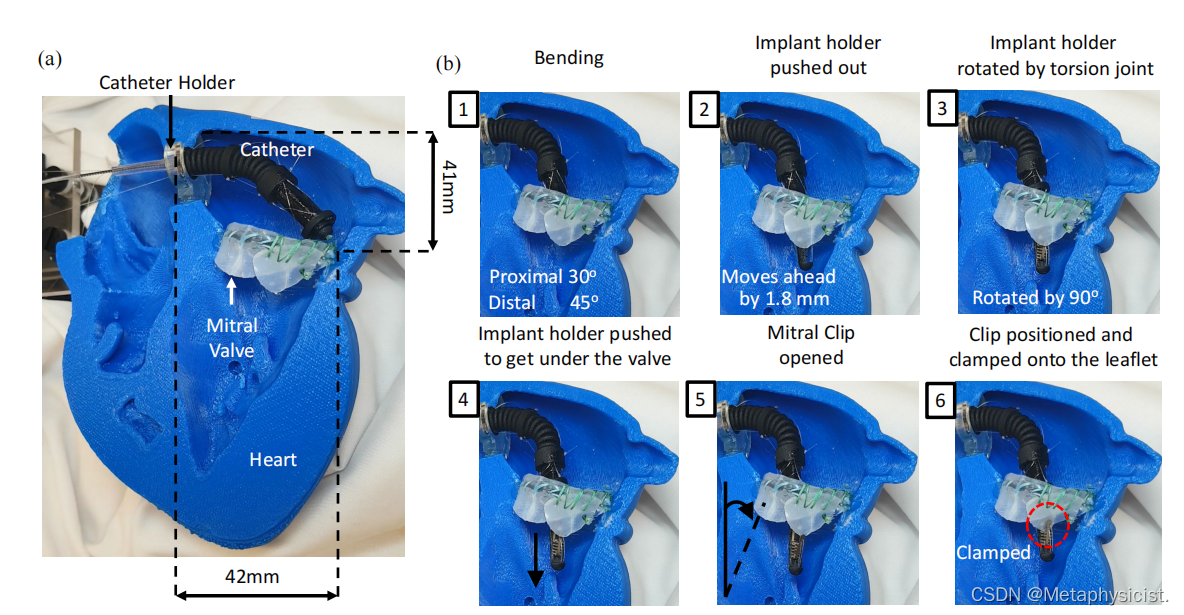
图9:(a)演示使用心脏模型进行经导管介入;(b)程序将植入物输送至二尖瓣瓣叶。
Conclusion
这项工作提出了一种机器人可操纵的导管设计和开发,用于经导管介入治疗二尖瓣反流。 所提出的设计具有两个弯曲关节,关节之间的耦合较低,并且有一个直接驱动的扭转关节。 为每个关节导出了运动学模型,并与实验结果进行了比较。最后,使用包含植入物输送模块的导管演示了经导管手术过程。在未来工作中,将致力于实施完自动化的驱动系统,并在超声引导下进行导航。
Reference
[1] Nayar, N., Jeong, S., & Desai, J. P. (2020, October). Towards the development of a robotic transcatheter delivery system for mitral valve implant. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3172-3177). IEEE.
















 2890
2890











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











