






AEB基于危险系数,复现lun wen(相对基础)。
构建了基于TTC和危险系数的风险评估模型,适合初学AEB,想了解AEB原理和simulink搭建的,simulink中有风险评估的状态机模型和底层PID控制的实施模型,采用trucksim carsim联合仿真实现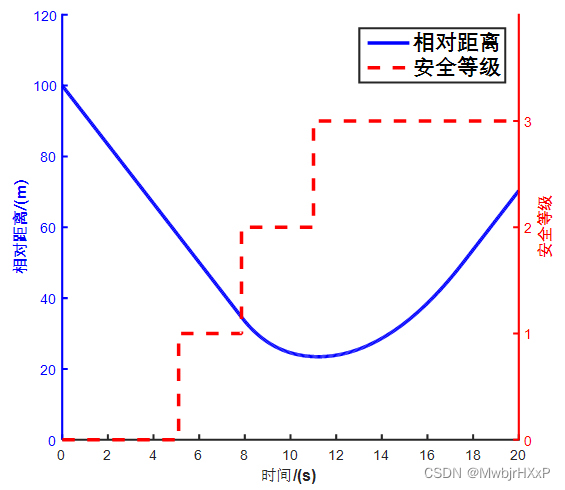
AEB技术在汽车安全领域中起着至关重要的作用,能够对驾驶员的驾驶行为进行监测,并在出现危险时主动采取措施来避免碰撞事故的发生。在AEB系统中,基于危险系数的风险评估模型是非常关键的一环。本文将围绕着AEB系统中的风险评估模型展开论述,并介绍如何使用Simulink来构建AEB系统的状态机模型和底层PID控制的实施模型。
首先,我们来了解一下AEB系统中风险评估模型的作用。风险评估模型是AEB系统中最重要的部分之一,其主要是以车辆与前方障碍物之间的距离、车速、障碍物的速度和方向等因素为依据,计算出当前车辆与前方障碍物之间的危险系数。基于危险系数,AEB系统能够以最快的速度做出反应,比如及时发出警报声音、减速甚至刹车来避免碰撞事故。因此,建立高精准的风险评估模型对提高AEB系统的性能至关重要。
接下来,我们介绍如何使用Simulink来构建AEB系统的状态机模型和底层PID控制的实施模型。首先,我们需要使用Simulink进行系统建模,建立一个基于TTC和危险系数的风险评估模型,并结合车辆的动态参数、传感器数据等变量构建状态机模型。在AEB系统中,状态机模型通常包括“安全”、“警告”、“刹车”等不同的状态。在安全状态下,车辆与前方障碍物之间的距离较远,AEB系统不需要采取任何措施;当车辆接近障碍物并达到警告状态时,系统会根据风险评估模型的结果,发出声音和光线等警告信号,提醒驾驶员采取措施;当车辆接近障碍物并达到刹车状态时,系统会启动底层的PID控制模型,控制车辆的刹车力度,使车辆能够快速减速或停车,从而避免碰撞事故的发生。
最后,在AEB系统的搭建过程中,联合仿真是非常重要的一环。在联合仿真中,我们可以使用TruckSim和CarSim等工具来模拟实际的驾驶情境,包括车辆的行驶速度、路线、障碍物位置和速度等因素,从而对AEB系统的性能进行全面测试和优化。通过联合仿真,我们可以更加精确地验证风险评估模型和状态机模型的准确性,并调整PID控制模型的参数来实现更加精准的刹车控制。
总结而言,本文介绍了AEB系统中风险评估模型的重要性,并详细介绍了如何使用Simulink来构建AEB系统的状态机模型和底层PID控制的实施模型,以及如何通过联合仿真来优化系统性能。在实际应用过程中,我们需要结合实际的道路条件和车辆参数来针对性地优化AEB系统的性能,从而实现更加高效、安全的驾驶体验。
相关代码,程序地址:http://lanzouw.top/667690979729.html















 7088
7088











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









