






自动驾驶融合定位: IMU预积分模型及应用

附赠自动驾驶学习资料和量产经验:链接
一、概述
在上一篇文章中,我们给出了下面的框图中实现框图对应的理论部分,但是也提到,虚线对应的部分太过复杂,当时没有介绍。

下面来分析一下具体的原因。带IMU的融合模型中的优化问题可以表示为

三种约束分别通过以下方式获得:
1) 激光里程计约束:使用激光里程计,计算每个关键帧位姿,进而得到相对位姿;
2) IMU约束:在上一个关键帧位姿基础上,进行惯性积分,从而得到两关键帧相对位姿;
3) RTK约束:直接测量得到。
此时融合流程可以用下面的流程图表示

这个流程图中,红色部分是本篇文章新增的IMU约束对应的环节,剩下的部分就是上一篇文章对应的流程了。所以从这个框图中也可以看出这两篇文章在内容上的分工了。
二、预积分问题引入
这种融合模型的核心问题在于,IMU的约束是通过惯性积分得到的,而惯性积分是以它前一时刻的位姿为初始值得到的,但是位姿每次优化后会发生变化,这导致其后的IMU惯性积分就要重新进行,显然运算量过大。
这个问题的解决思路就是直接计算两帧之间的相对位姿,而不依赖初始值影响,即所谓的预积分。本篇文章剩余的篇幅就几乎全在讨论预积分的问题。
三、预积分模型介绍
在前面的惯性导航文章中,已知导航的微分方程如下
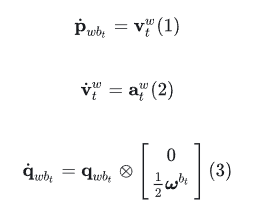
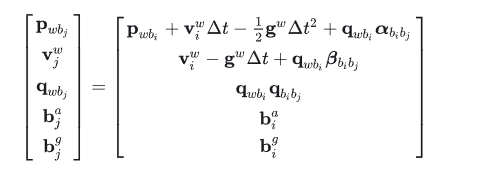
根据该微分方程,可知从 i 时刻到 j 时刻 IMU的积分结果为
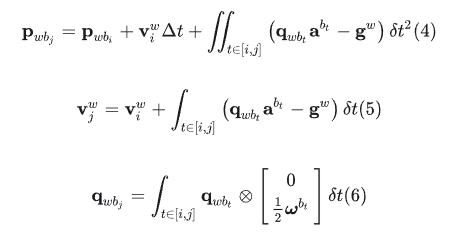
根据预积分的要求,需要求相对结果,而且不依赖于上一时刻位姿,因此需要对上式做转换。
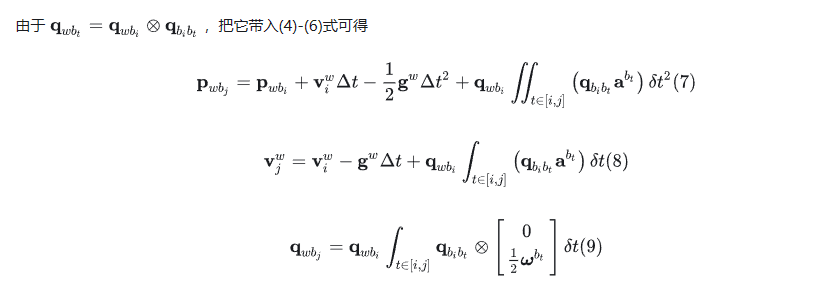
以上三个式子中,积分符号里面的项,就是需要预积分的项,可见,他们已经完全和i时刻的状态无关了。
为了整理公式,把积分相关的项用下面的式子代替
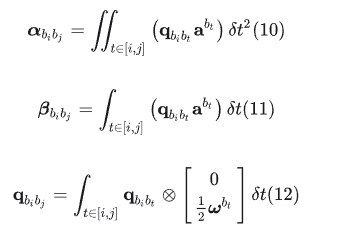
实际使用中使用离散形式,而非连续形式,由于在解算中,一般采用中值积分方法,即
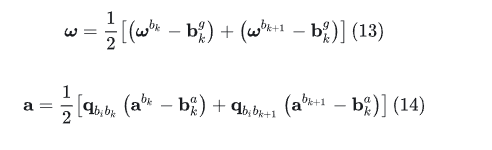
那么预积分的离散形式可以表示为
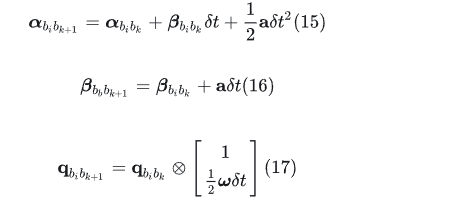
经过以上的推导,此时状态更新的公式可以整理为
需要注意的是,陀螺仪和加速度计的模型为
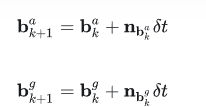
即认为bias是在变化的,这样便于估计不同时刻的bias值,而不是整个系统运行时间内都当做常值对待。这更符合低精度mems的实际情况。但在预积分时,由于两个关键帧之间的时间较短,因此认为i和j时刻的bias相等。
需要注意的一点是,预积分的结果中包含了bias,在优化过程中,bias作为状态量也会发生变化,从而引起预积分结果变化。为了避免bias变化后,重新做预积分,可以把预积分结果在bias处泰勒展开,表达成下面的形式,这样就可以根据bias的变化量直接算出新的预积分结果。
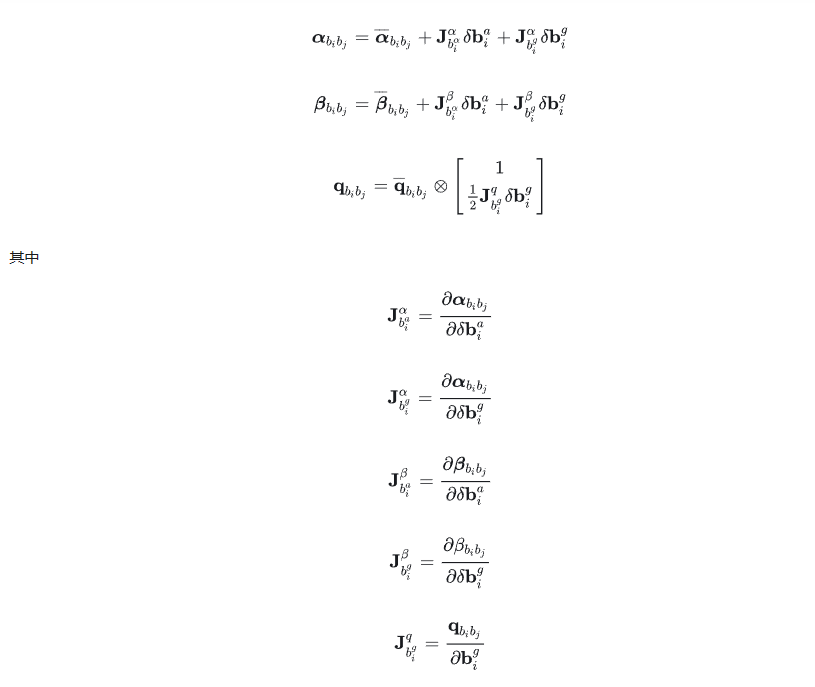
此处暂时只直接给出以上各雅可比的结果,它的推导放在后面进行。
四、预积分在优化中的使用
1.使用思路
1)凸优化回顾
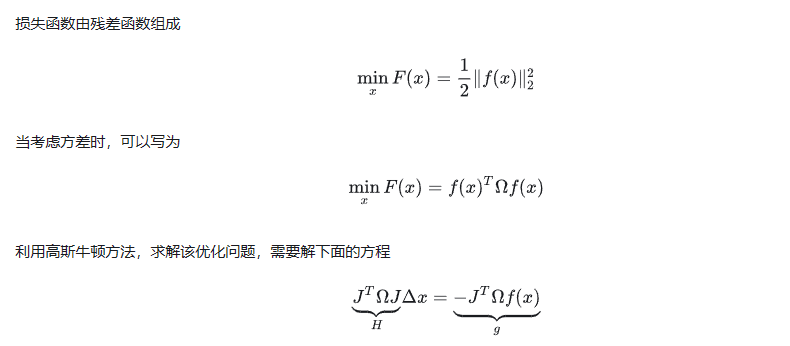
即,在优化中使用一项信息,需要设计残差,并推导它的雅可比和方差
2)预积分的使用
按照优化的套路,在优化中使用预积分,需要:
a.设计残差
b.推导残差关于待优化变量的雅可比
c.计算残差的方差
除此以外,预积分中还多一项计算,即推导bias变化时,预积分量重新计算的方法(上面提到过的)。
2. 残差设计
在优化时,需要知道残差关于状态量的雅可比。由于已知姿态位姿更新的方法如下
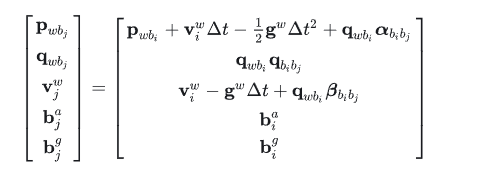
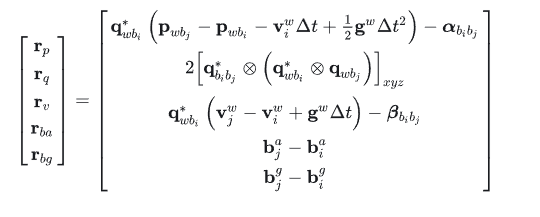
因此,可以很容易写出一种残差形式如下:
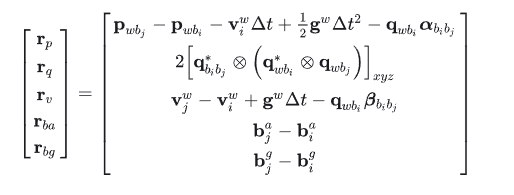
但是和预积分相关的量,仍然与上一时刻的姿态有关,无法直接加减,因此,把残差修正为以下形式
待优化的变量是
但在实际使用中,往往都是使用扰动量,因此实际是对以下变量求雅可比
3. 残差雅可比的推导
此处只对几个比较复杂的雅可比进行推导(放在附录A中),其余比较简单,感兴趣的可自行完成。
4. 预积分方差计算
4.1 核心思路
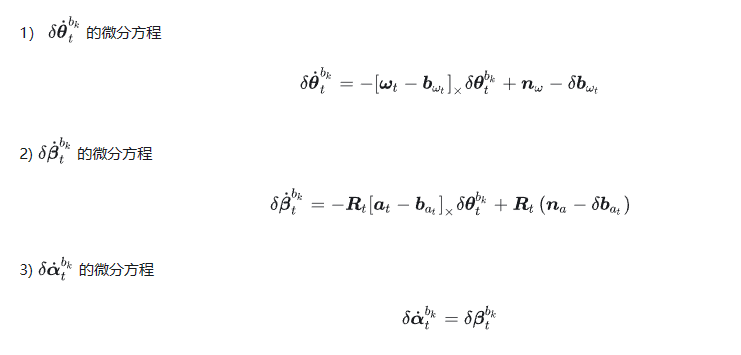
4.2 连续时间下的微分方程
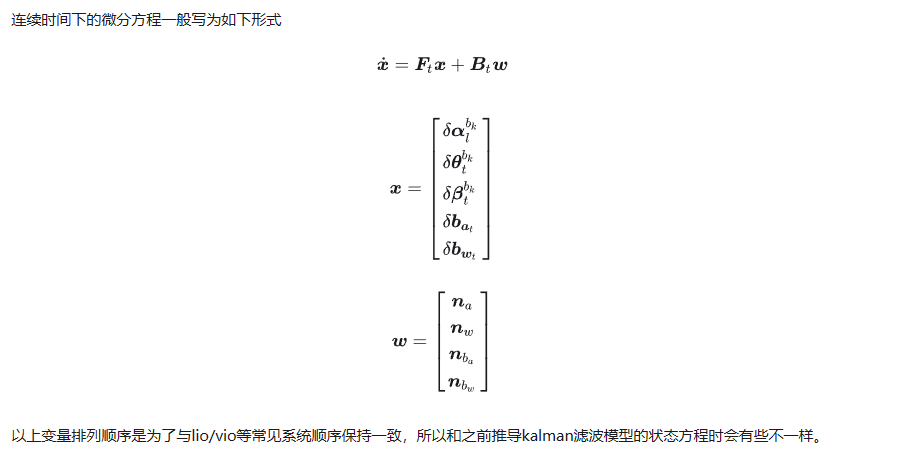
4.2 连续时间下的微分方程
推导方法已经在之前的文章中介绍过,此处直接给出结果
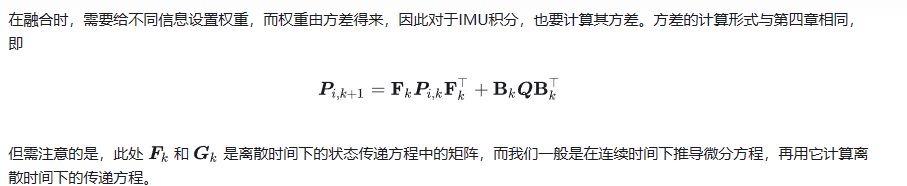
4.3 离散时间下的传递方程
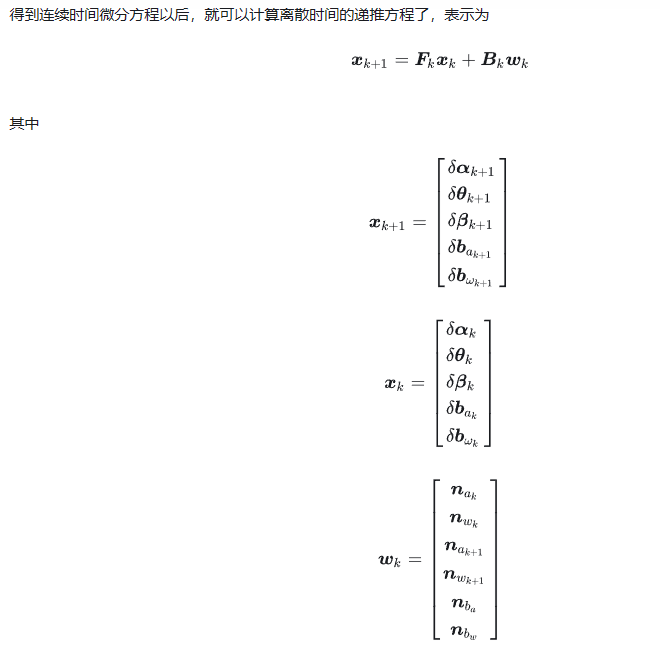
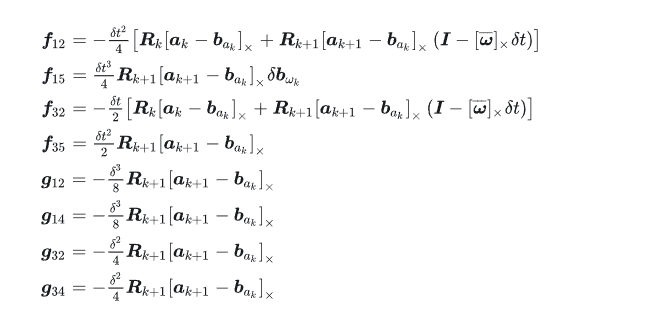
由于推导较为复杂,此处给出结论(如下公式),推导过程放在附录B中。
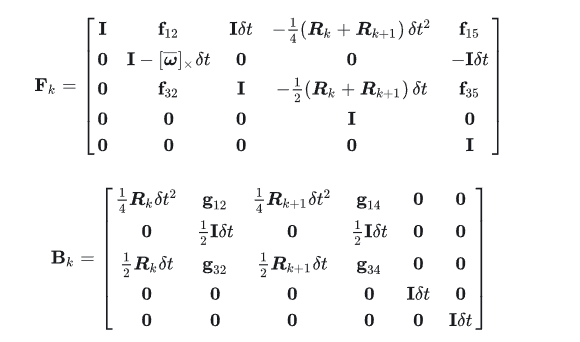
其中
5. 预积分更新
回到前面遗留的问题,即bias变化时,预积分结果怎样重新计算的问题,现在是时候来解决它了。再次给出它的泰勒展开形式

这里,雅可比没有明确的闭式解,但是在推导方差的更新时,我们得到了

通过该递推形式,可以知道
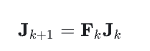
即预积分结果的雅可比,可以通过这种迭代方式计算。

五、总结
可以看出,预积分的推导非常复杂,但只要耐心下来,把思路捋清楚,还是比较容易弄懂的,就是太费纸了。
==附录A====
附录A 残差雅可比推导
1. 姿态残差的雅可比
1)对i时刻姿态误差的雅可比
上式可以化简为
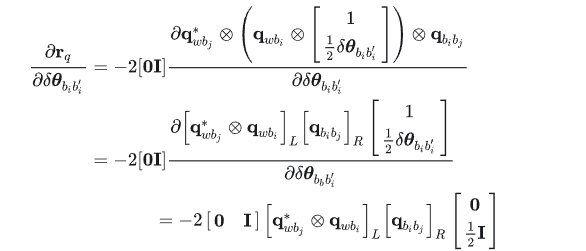
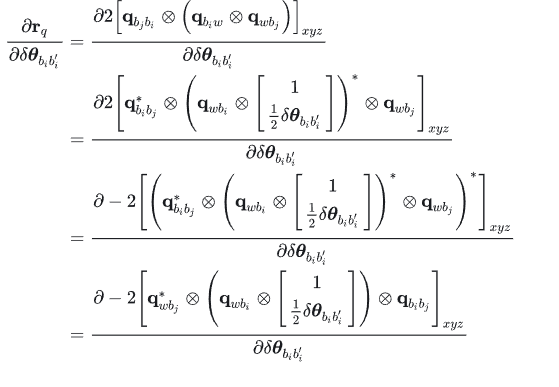
2)对j时刻姿态误差的雅可比
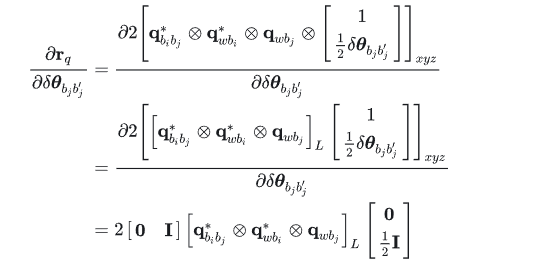
3)对i时刻陀螺仪bias误差的雅可比
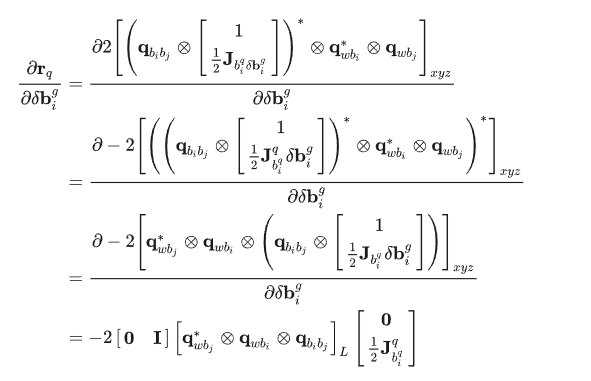
2. 速度残差的雅可比
1)对i时刻姿态误差的雅可比
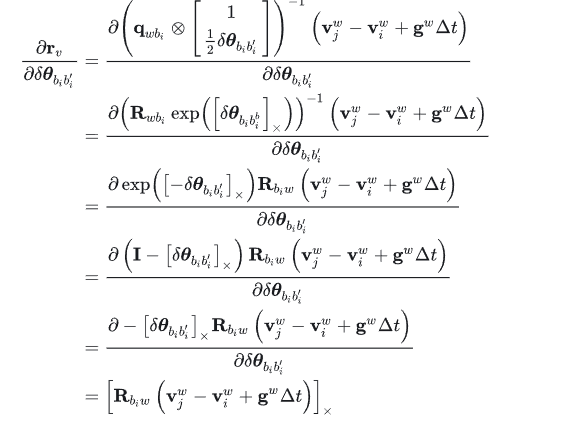
2)对i时刻速度误差的雅可比
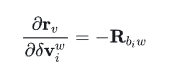
3)对i时刻加速度bias误差的雅可比
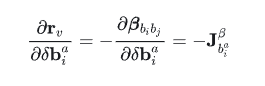
3.位置残差的雅可比
位置残差的雅可比比较简单,不在这里推了,照猫画虎自己推一下就行。
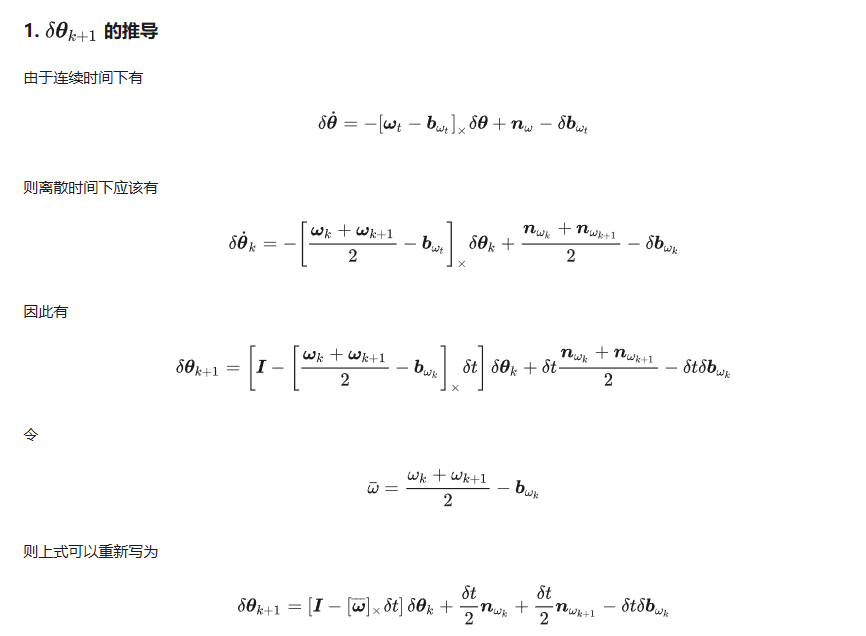
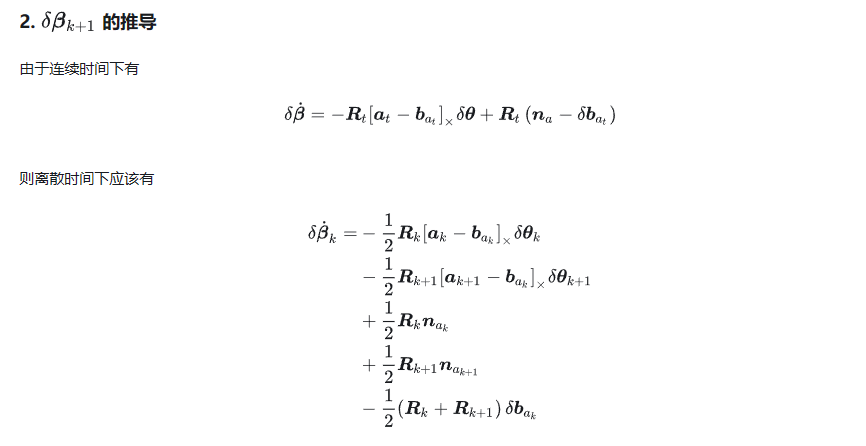
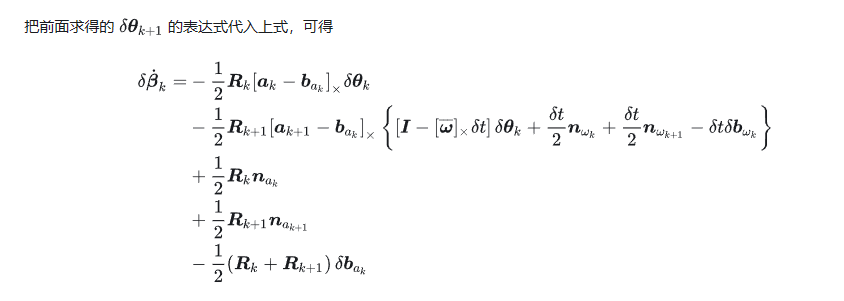
==附录B====
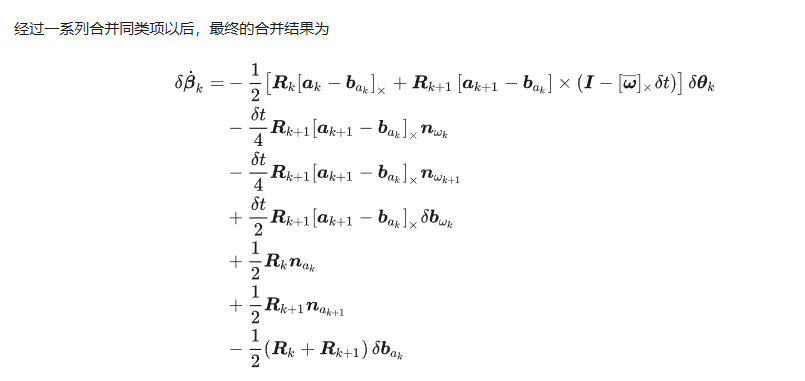
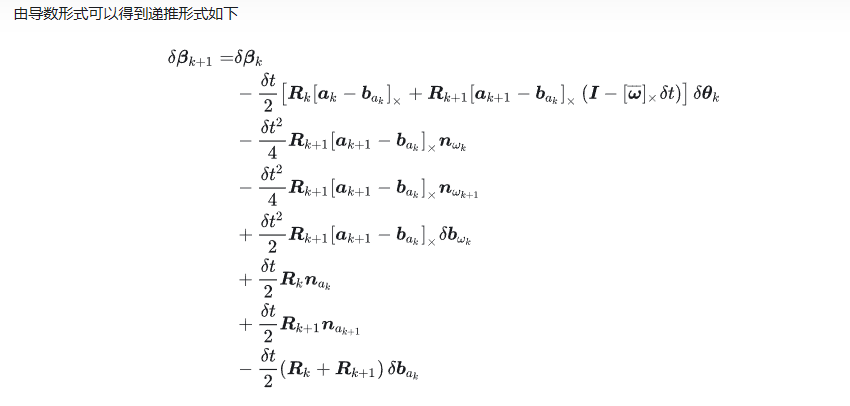
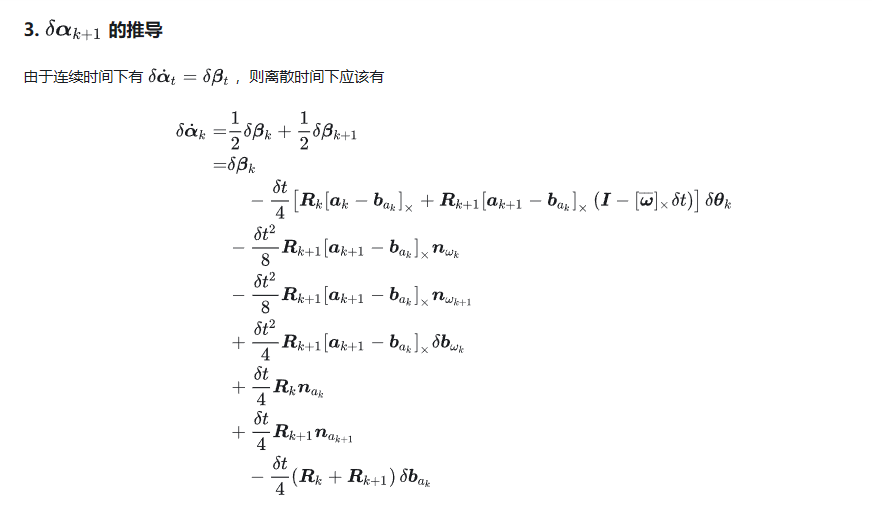
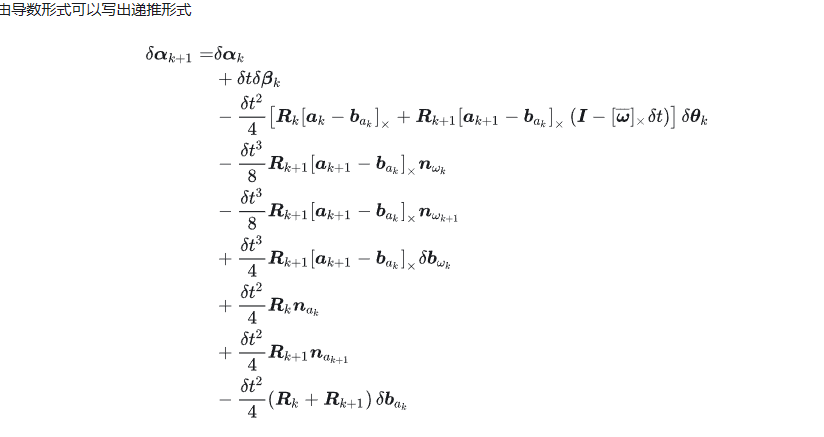
附录B 离散时间递推方程推导















 1369
1369

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









