







在求解线性系统的过程中,需要对线性系统的系数矩阵和结果矩阵构成的增广矩阵进行一系列的矩阵基本操作(①矩阵的一行乘以一个常数; ②矩阵的一行加(减)另一行;③交换矩阵的两行)来消元得到线性系统的解。因为矩阵可以表示变换,所以像矩阵基本操作这种一系列的变换也可以通过一个矩阵进行表示。即 E ∗ A = A ′ E * A = A^{'} E∗A=A′, E E E是矩阵 A A A的变换矩阵。
由于一个矩阵左乘单位矩阵
I
I
I,可以得到这个矩阵的本身,其实单位矩
I
I
I也代表一种变换。
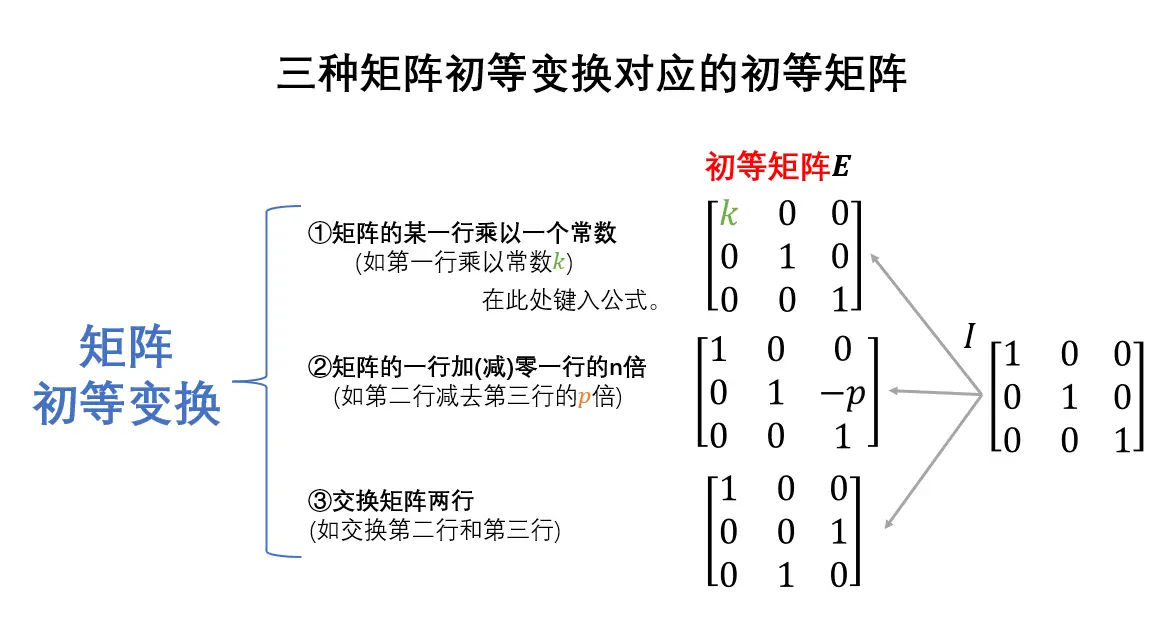
如果要对一个矩阵进行基础变换(也叫做
初等变换
\color{red} {\textbf{初等变换}}
初等变换)①矩阵的一行乘以一个常数; ②矩阵的一行加(减)另一行;③交换矩阵的两行,可以通过改变单位矩阵
I
I
I来得到变换矩阵
E
E
E ,矩阵
A
A
A通过左乘
E
E
E的方式完成变换
E
∗
A
=
A
′
E * A = A^{'}
E∗A=A′
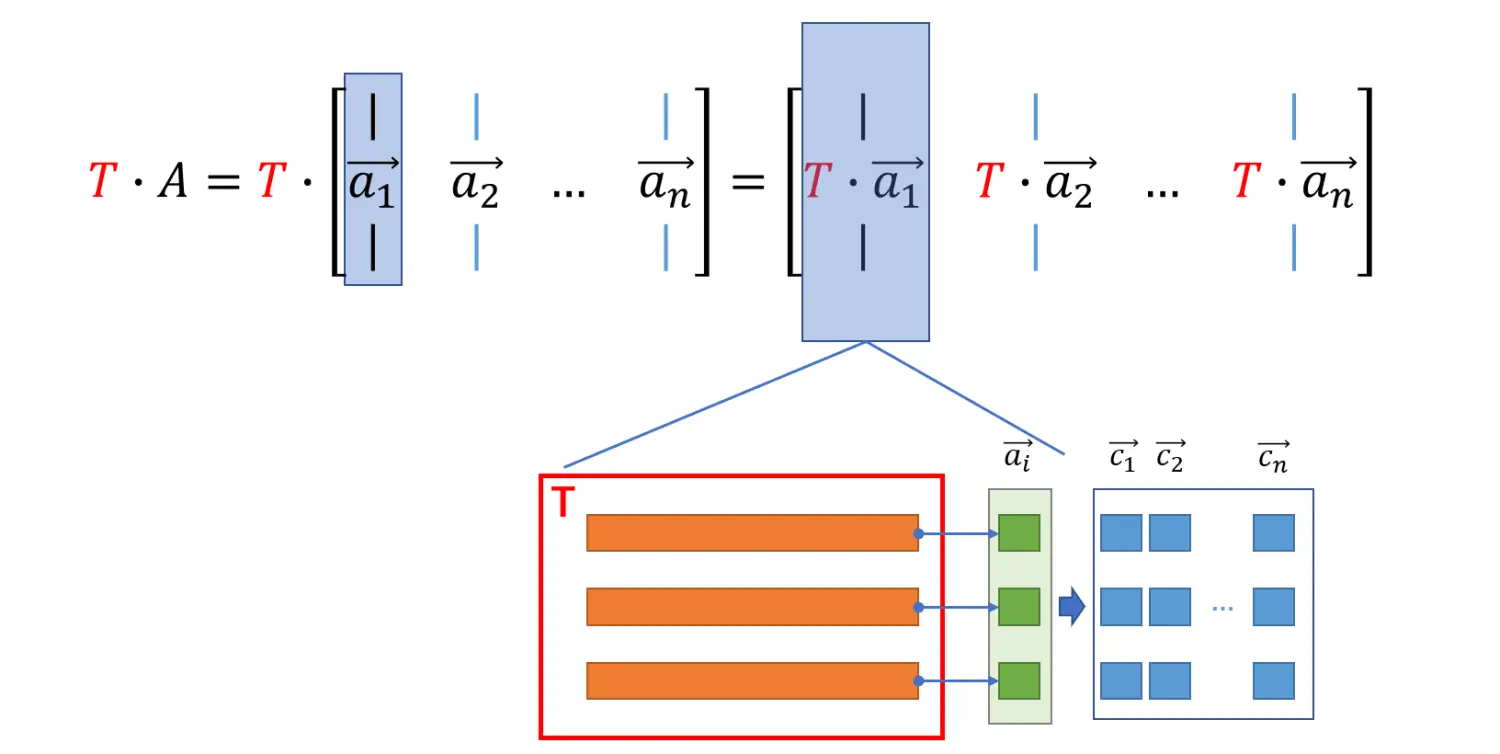
根据前面笔记提到的知识,矩阵与矩阵的乘法本质还是在进行列向量的变换,其中变换矩阵的每一行变换的是右乘矩阵的每一个列向量的对应行索引的元素【如变换矩阵 T T T的第1行变换右侧矩阵每个列向量的第1行元素(或者所第一个元素),变换矩阵 T T T的第2行变换右侧矩阵每个列向量的第2行元素】,所以左乘的变换矩阵是对由列向量组成的右乘矩阵进行列向量的批处理。(如下图示意)
基于这个理解,所以如果我们要改变矩阵 A A A的某一行,可通过修改左乘单位矩阵 I I I对应的行号的行来完成。
初等矩阵: 是对单位矩阵进行一次初等变换得到结果矩阵,记作
E
E
E; 初等矩阵本身是一种变换矩阵,对应于一种初等变换。
初等矩阵具有可逆性
对一个单位矩阵 I I I进行一次初等变换可以得到一个初等矩阵 E 1 E_{1} E1,如果再对矩阵 E 1 E_{1} E1执行一边反向操作(左乘另一个初等矩阵 E 2 E_{2} E2),那么矩阵 E 1 E_{1} E1就可以变回没有发生变换前的单位矩阵 I I I,即 E 2 ⋅ E 1 = I E_{2} \cdot E_{1} = I E2⋅E1=I,同理 E 1 ⋅ E 2 = I E_{1} \cdot E_{2} = I E1⋅E2=I,从而满足了矩阵的逆的定义。从 E 1 E_{1} E1的角度看 E 2 E_{2} E2是它的逆 E 1 − 1 E_{1}^{-1} E1−1;从 E 2 E_{2} E2的角度看则 E 1 E_{1} E1是它的逆 E 2 − 1 E_{2}^{-1} E2−1,所以有 E 1 , E 2 E_{1},E_{2} E1,E2互为逆矩阵。
通过初等矩阵求解一个矩阵的逆的方式
如果一个一般矩阵有逆的话,它的增广矩阵形式 [ a b ∣ 1 0 c d ∣ 0 1 ] \begin{bmatrix} a&b&|&1&0 \\ c&d&|&0&1 \end{bmatrix} [acbd∣∣1001]一定有解或无解[1]。当有唯一解时,这个增广矩阵的系数矩阵将变成单位矩阵 [ a b c d ] → [ 1 0 0 1 ] → I \begin{bmatrix} a&b \\ c&d \end{bmatrix} \to \begin{bmatrix} 1&0 \\ 0&1 \end{bmatrix} \to I [acbd]→[1001]→I;据此我们可以理解,对一个有逆的一般矩阵(方阵)而言,通过一系列变换操作得到它的"行最简形式"一定是一个单位矩阵 I I I,也即 E p ⋅ . . . ⋅ E 3 ⋅ E 2 ⋅ E 1 ⋅ A = r e f f ( A ) = I E_{p}\cdot ... \cdot E_{3} \cdot E_{2} \cdot E_{1} \cdot A = reff(A) = I Ep⋅...⋅E3⋅E2⋅E1⋅A=reff(A)=I
因此,如果一个矩阵 A A A有逆,就会存在一系列初等矩阵 E E E,使得:E p ⋅ . . . ⋅ E 3 ⋅ E 2 ⋅ E 1 ⋅ A = I E_{p}\cdot ... \cdot E_{3} \cdot E_{2} \cdot E_{1} \cdot A = I Ep⋅...⋅E3⋅E2⋅E1⋅A=I
等式两边同时右乘 A − 1 → E p ⋅ . . . ⋅ E 3 ⋅ E 2 ⋅ E 1 ⋅ A ⋅ A − 1 = I ⋅ A − 1 A^{-1} \to E_{p}\cdot ... \cdot E_{3} \cdot E_{2} \cdot E_{1} \cdot A \cdot A^{-1}= I \cdot A^{-1} A−1→Ep⋅...⋅E3⋅E2⋅E1⋅A⋅A−1=I⋅A−1
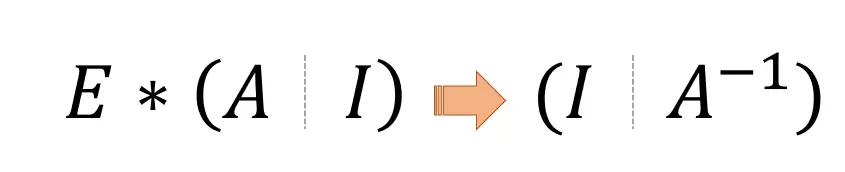
得到 E p ⋅ . . . ⋅ E 3 ⋅ E 2 ⋅ E 1 ⋅ I = A − 1 E_{p}\cdot ... \cdot E_{3} \cdot E_{2} \cdot E_{1} \cdot I = A^{-1} Ep⋅...⋅E3⋅E2⋅E1⋅I=A−1;该式意味着当一个矩阵 A A A可逆,那么可以在 I I I的基础上,左乘一系列使矩阵 A A A化为单位矩阵 I I I的初等矩阵来得到矩阵 A A A的逆 A − 1 A^{-1} A−1。



















 1466
1466

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











