





 本文探讨了图像处理中关键的边缘检测技术,包括Robert、Sobel、Prewitt和Laplacian算法。这些算法通过检测图像灰度值的显著变化来识别图像边缘,对图像识别和轮廓提取至关重要。
本文探讨了图像处理中关键的边缘检测技术,包括Robert、Sobel、Prewitt和Laplacian算法。这些算法通过检测图像灰度值的显著变化来识别图像边缘,对图像识别和轮廓提取至关重要。
把我论文机翻了一下保存一下
图像通常分为主要部分和背景部分。主体和背景之间的连接部分是图像边缘。在边缘,图像的灰度值和梯度将发生显着变化[2]。我们需要通过算法找到这些梯度。因此,图像边缘成为图像的重要识别特征,直接影响识别结果和效率。这些梯度变化较大的点被标记为图像轮廓的位置。当我们检测边缘时,这些轮廓通常非常重要,某些特征条件要求我们检测并提取图像的边缘。在本文中,我将在这里介绍Robert算法,Sobel算法,Prewitt算法和Laplacian算法。
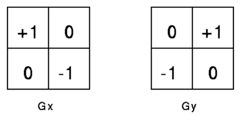
首先是罗伯特(Robert)算法,基本原理是通过局部差异计算来检测边缘线。它通常用于处理陡峭的低噪声图像。陡度是指梯度的陡度。当人们站在山上时,人们可以选择360°的方向,该方向是最快(最陡峭)的下坡路线。 Roberts运算符也称为交叉微分算法。这是一种基于交叉差异的梯度算法,可通过局部差异计算来检测边缘线。它通常用于处理陡峭的低噪声图像。 Roberts运算符的模板分为水平和垂直方向,如以下公式所示。从模板可以看出,Roberts运算符可以将正负45度更好地增强图像的边缘。当使用Roberts算子并且图像的边缘接近正45度或负45度时,该算法具有更好的处理效果[2]。缺点是边缘的定位不准确,并且提取的边缘线很粗
[34]
Prewitt算子是另一种差分算子,它经常用于图像边缘检测。其原理是利用特定区域中像素灰度值产生的差异来实现边缘检测。由于Prewitt运算符使用3 * 3模板来计算区域中的像素值,而Robert运算符具有2 * 2的模板,因此Prewitt运算符的边缘检测结果在水平和垂直方向上都比在水平方向和垂直方向上都更为明显。 Robert运算符[2]。 Prewitt运算符适用于识别具有更多噪点和灰度梯度的图像。
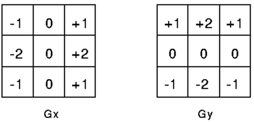
下一个是Sobel算子,它是用于边缘检测的离散微分算子。该运算符用于计算图像明暗度的近似值。根据图像边缘的明暗,将超过一定数量的区域中的特定点记录为边缘。 Sobel运算符在Prewitt运算符的基础上增加了权重的概念。它认为相邻点之间的距离对当前像素点有不同的影响。像素点越近,对当前像素的影响越大。然后,我们可以锐化和突出显示边缘轮廓。因此,在Sobel算子中,像素的四个连接像素的计算权重比四个角的像素权重更重要,这可以使边缘判断更加准确。 Sobel运算符的边缘位置更准确,通常用于具有更多噪点和灰度梯度的图像。下图显示了Sobel的卷积因子[2]。我们首先计算x和y方向上的灰度,然后计算渐变。梯度较大的区域将是边缘区域。
[35]
最后一个是拉普拉斯算子。 基本步骤是首先确定图像中心像素的灰度值及其周围其他像素的灰度值[3]。 如果像素的灰度值高于其他像素,我们将增加该像素的灰度值。 否则,我们将降低灰度值。 为了实现图像锐化操作,在算法实现过程中,拉普拉斯算子求出邻域中心像素的四个方向或八个方向的梯度,然后改变梯度来确定图像灰度值之间的关系。 中心像素和附近其他像素的灰度值。 操作员的结果将调整像素灰度级。

















 326
326

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









