






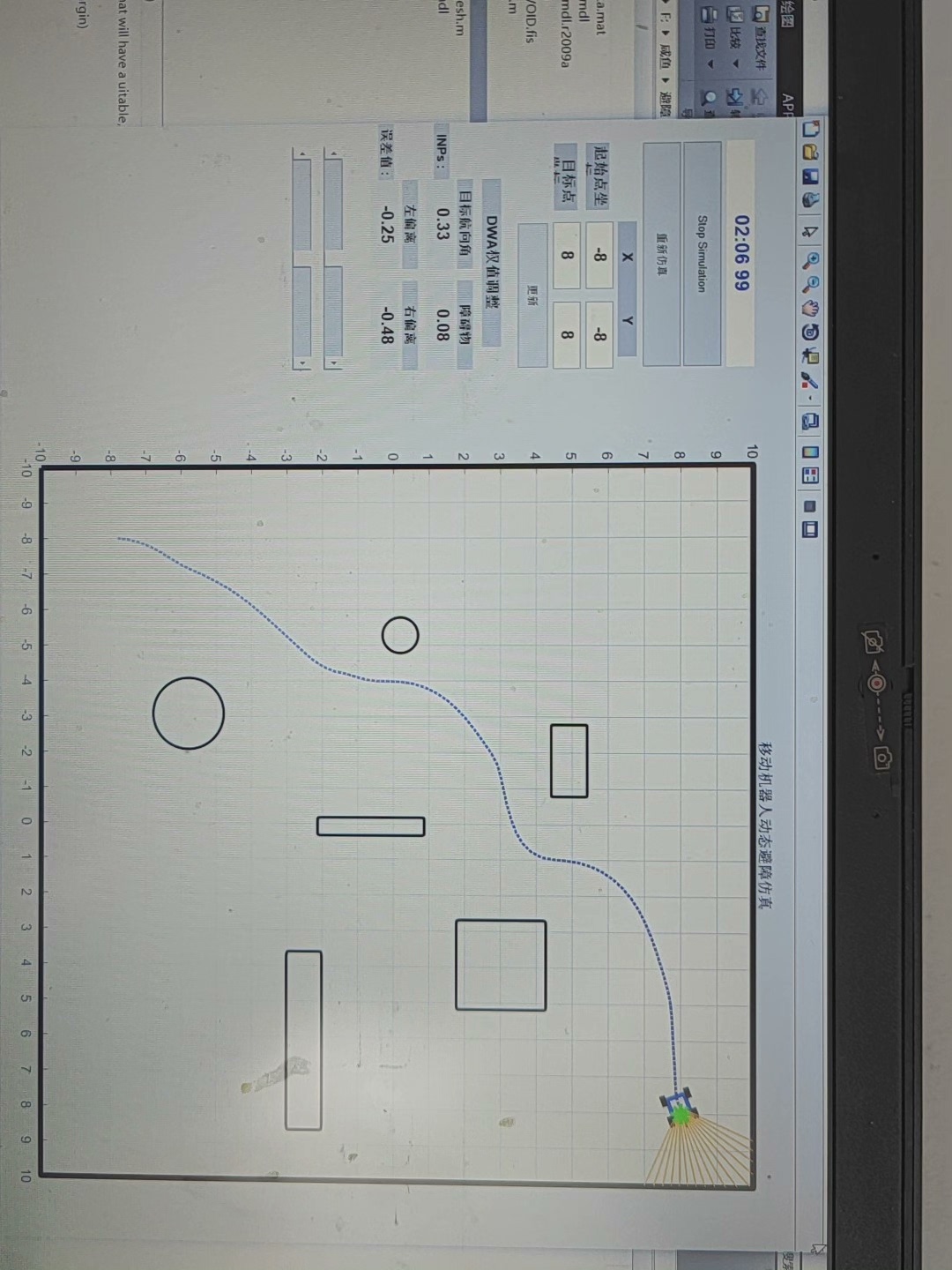
移动机器人动态避障仿真,DWA方法,包含静态障碍物和动态障碍物,实现对障碍物避障的路径规划
ID:4150704585729656
t***1
在移动机器人的领域中,动态避障仿真是一项非常重要的技术。其中,DWA方法是一种常用的路径规划算法,能够在包含静态和动态障碍物的环境中,实现机器人对障碍物的避障。
首先,让我们来了解一下移动机器人动态避障仿真的背景和意义。在现实世界中,存在大量的环境障碍物,比如家具、行人等等。这些障碍物可能是静态的,也可能是动态的,它们对机器人行动的路径规划提出了挑战。因此,研究如何让移动机器人智能地感知并避开这些障碍物,能够大大提高机器人的导航能力和安全性。
在动态避障仿真中,DWA方法是一种非常经典和有效的路径规划算法。DWA(Dynamic Window Approach)方法基于机器人当前的状态和环境信息,通过动态窗口的方式来搜索最佳的行动路径。具体来说,DWA方法将机器人的运动空间划分为离散的动态窗口,然后根据机器人的动力学约束和预测模型,计算出每个窗口下机器人在下一时刻可能到达的位置。接着,通过评估每个窗口下的路径代价函数,DWA方法选择代价最小的路径作为机器人的下一步行动。这样,移动机器人就能够在复杂的环境中快速而安全地规划出路径,避开障碍物。
在实际应用中,DWA方法能够很好地应对包含静态和动态障碍物的环境。首先,对于静态障碍物,DWA方法可以根据机器人的传感器数据,实时地感知到障碍物的位置和形状,从而避免碰撞。其次,对于动态障碍物,DWA方法能够通过预测模型和历史数据,对障碍物的运动轨迹进行预测,并在路径规划中进行考虑。这样一来,即使有动态障碍物的情况下,移动机器人也能够灵活地规划路径,保证行动的安全性和效率。
除了能够实现对障碍物避障的路径规划,DWA方法还具备一些其他的优势。首先,DWA方法的计算速度相对较快,能够在实时系统中得到应用。其次,DWA方法的参数设置相对简单,易于调节和优化。在实际应用中,人们可以通过不断调整参数,使得DWA方法在不同的环境和任务下取得更好的性能。
总而言之,移动机器人动态避障仿真是一项重要且具有挑战性的技术。通过DWA方法,我们可以实现对包含静态和动态障碍物的环境进行路径规划,保证机器人的安全行动。未来,随着人工智能和机器学习等领域的不断发展,我们可以期待动态避障仿真技术在移动机器人领域的更广泛应用和进一步的优化。
【相关代码,程序地址】:http://fansik.cn/704585729656.html
















 1870
1870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









