







Mapping in a Cycle: Sinkhorn Regularized Unsupervised Learning for Point Cloud Shapes
本文介绍一篇ECCV2020里面关于点云无监督学习的文章。
论文
目前还没有开源代码
1. 问题
点云形状的无监督学习
2. 思想
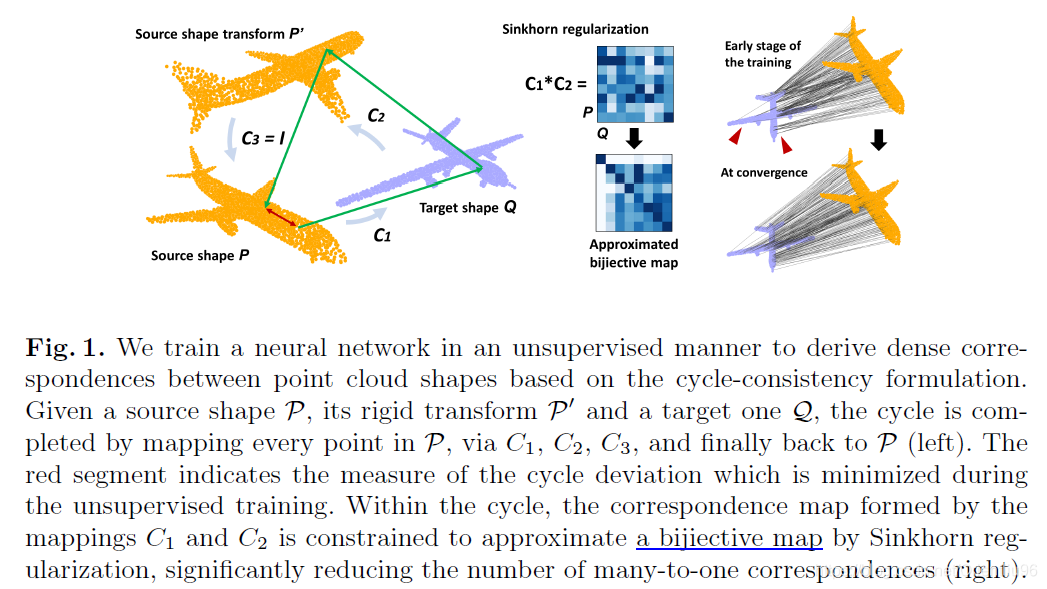
本文的主体思路是延续 Unsupervised cycle-consistent deformation for shape matching 这篇文章,在其基础上添加了sinkhorn regularization模块,从而尽可能的使cycle correspondences成为bijiective map(也叫一一映射)。背后的assumption应该是,如果网络能够将一个点集在不同transformation下的correspondece找到,那么也应该学习到了discriminative pointwise features。 这种assumption和CVPR 2020 GraphTER的思想不谋而合,个人觉得GraphTER对此assumptaion的阐述更详细,更有说服力。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9931
9931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









