









视觉检测项目中,表面细小缺陷的检测难度较大。而在某些检测场合,不仅需要检测细小缺陷,还需要提取更多深度信息如尺寸、形状等来帮助判断质量缺陷。
这样高难度的检测需求让3D线激光轮廓测量仪在缺陷检测领域的应用越来越广泛,也为锂电池表面缺陷检测提供了新的解决方案。
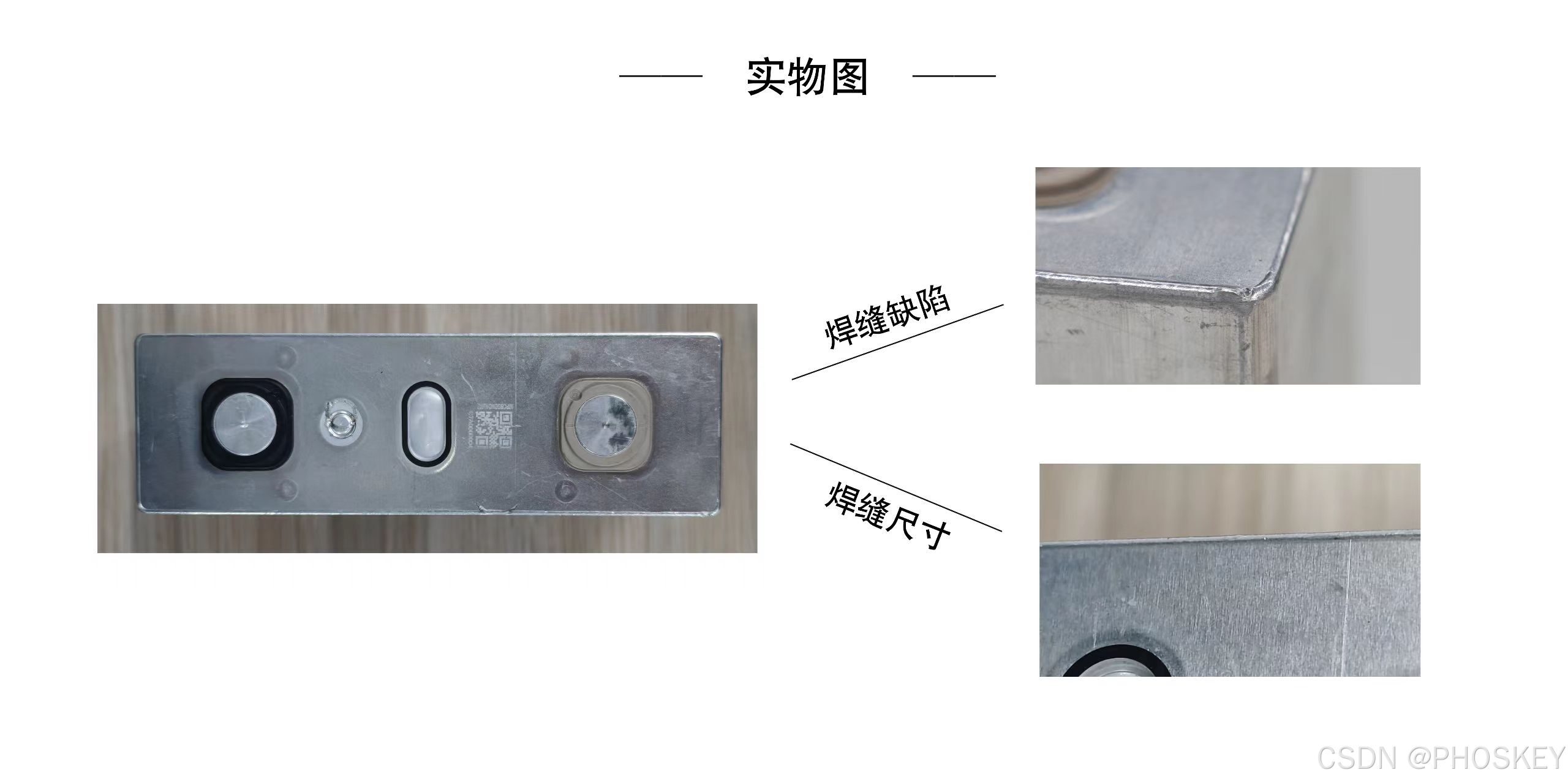
△ 锂电池焊缝瑕疵尺寸检测
检测需求
1.检测电池外壳焊接后的凹坑、爆点等缺陷,
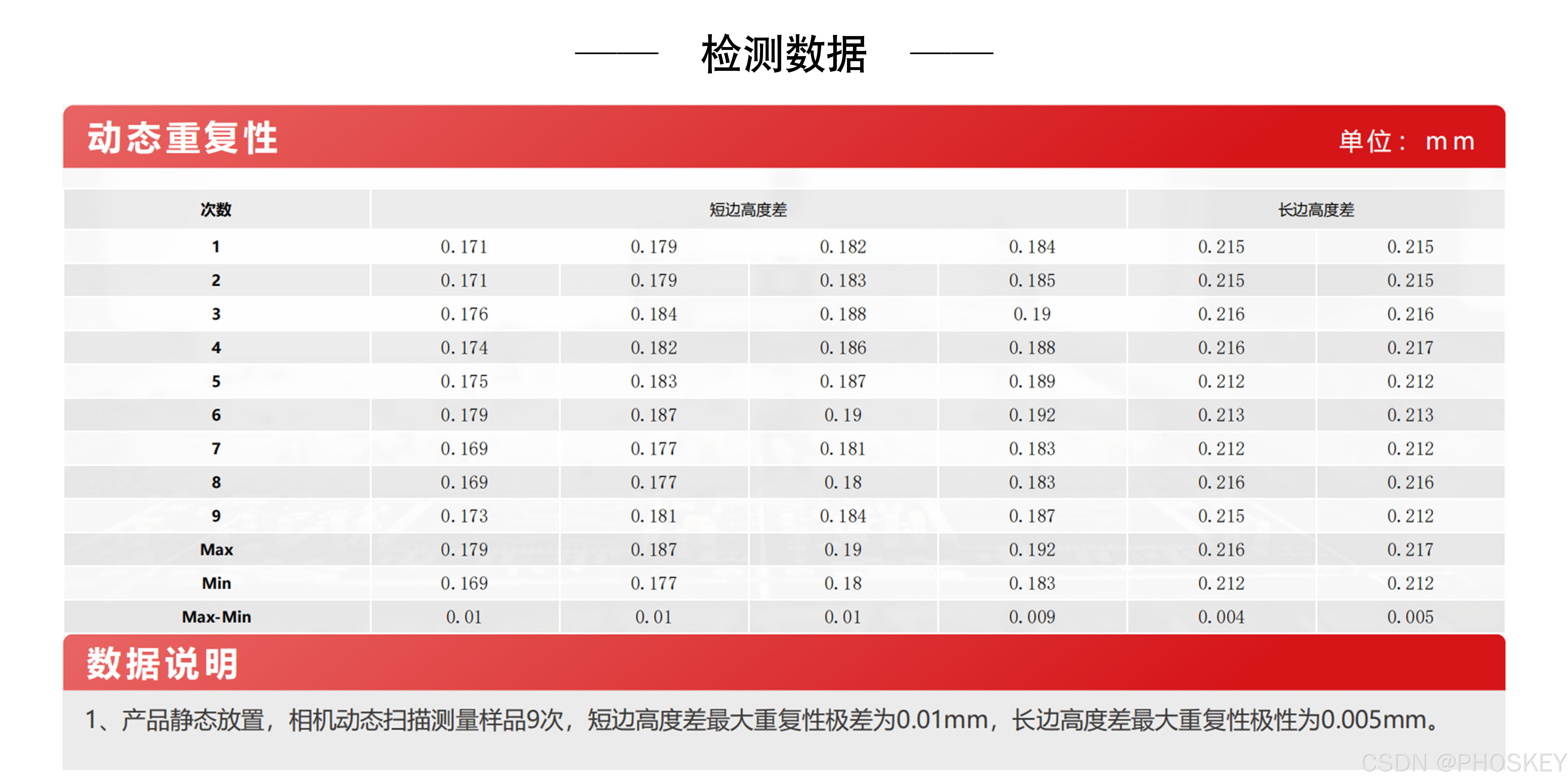
2.检测外壳两边四头方向的缝隙宽度和高度差。
检测难点
1.缺陷类型多且位置随机,对检测的速度和连续性要求高
2.焊缝与缺陷细小,测量设备须具备高分辨率和高精度
3.电池外壳存在高亮、高反光、折叠度高等复杂表面特性,易产生干扰
— 使用产品 —

○ 专业光学系统,微米级测量精度,轮廓点数高达4096点
○ 超高速采样49000轮廓/秒
○ 智能数据预处理算法功能
○ 多种测量模式灵活应用,可实现多种检测任务的精确测量
1.电池焊缝缺陷检测
根据产品相机倾斜30°扫描产品R角位置进行缺陷检测。
0.5mm锂电池外观缺陷检测 光子精密3D线激光轮廓测量仪
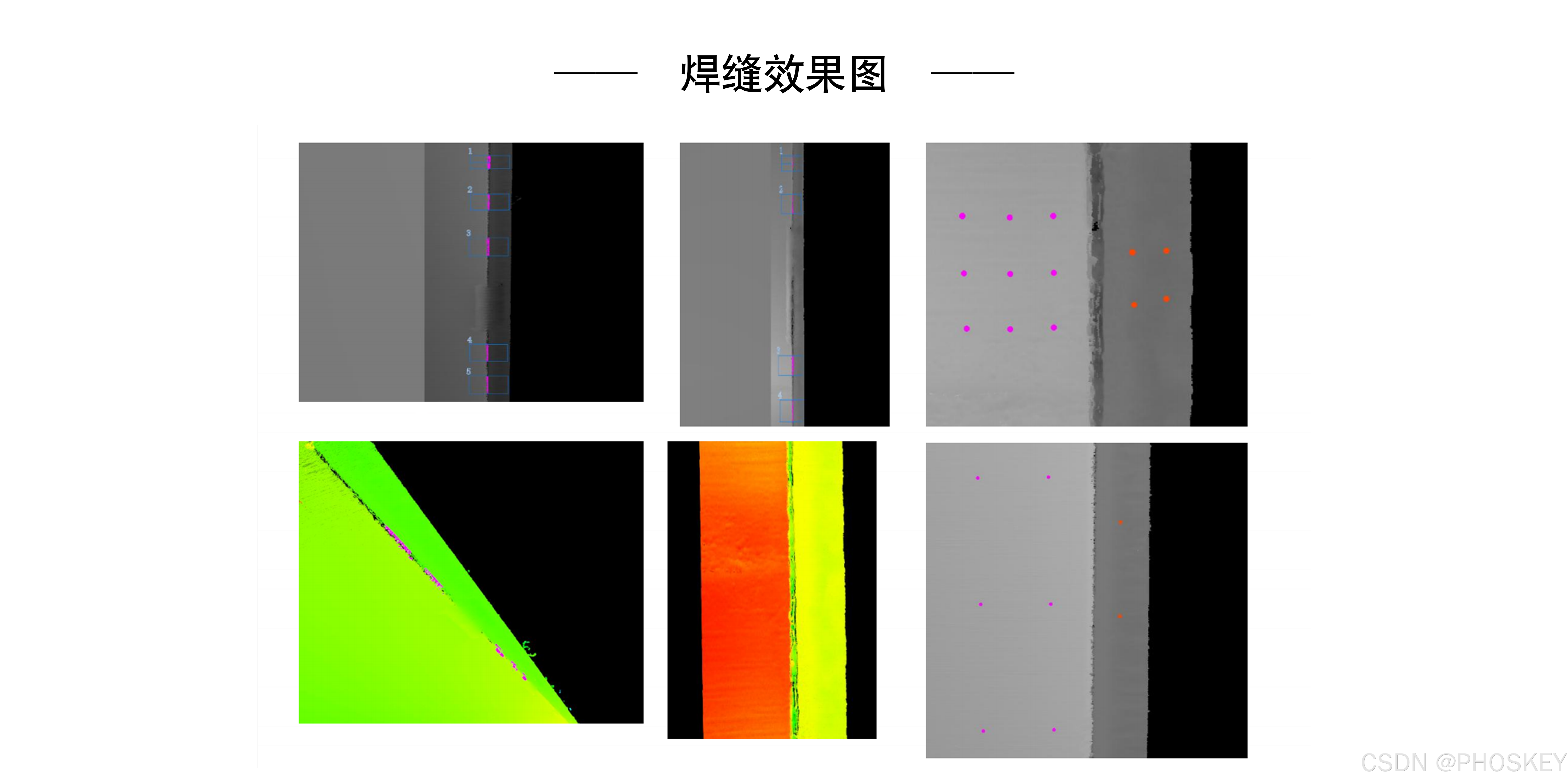
2.电池焊缝尺寸检测
根据产品相机水平扫描产品R角位置进行尺寸检测。检测焊缝的宽度以及高度差。(右侧图像为高度差检测图像,紫色矩阵与橙色矩阵做高度差计算)

















 91
91

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









