






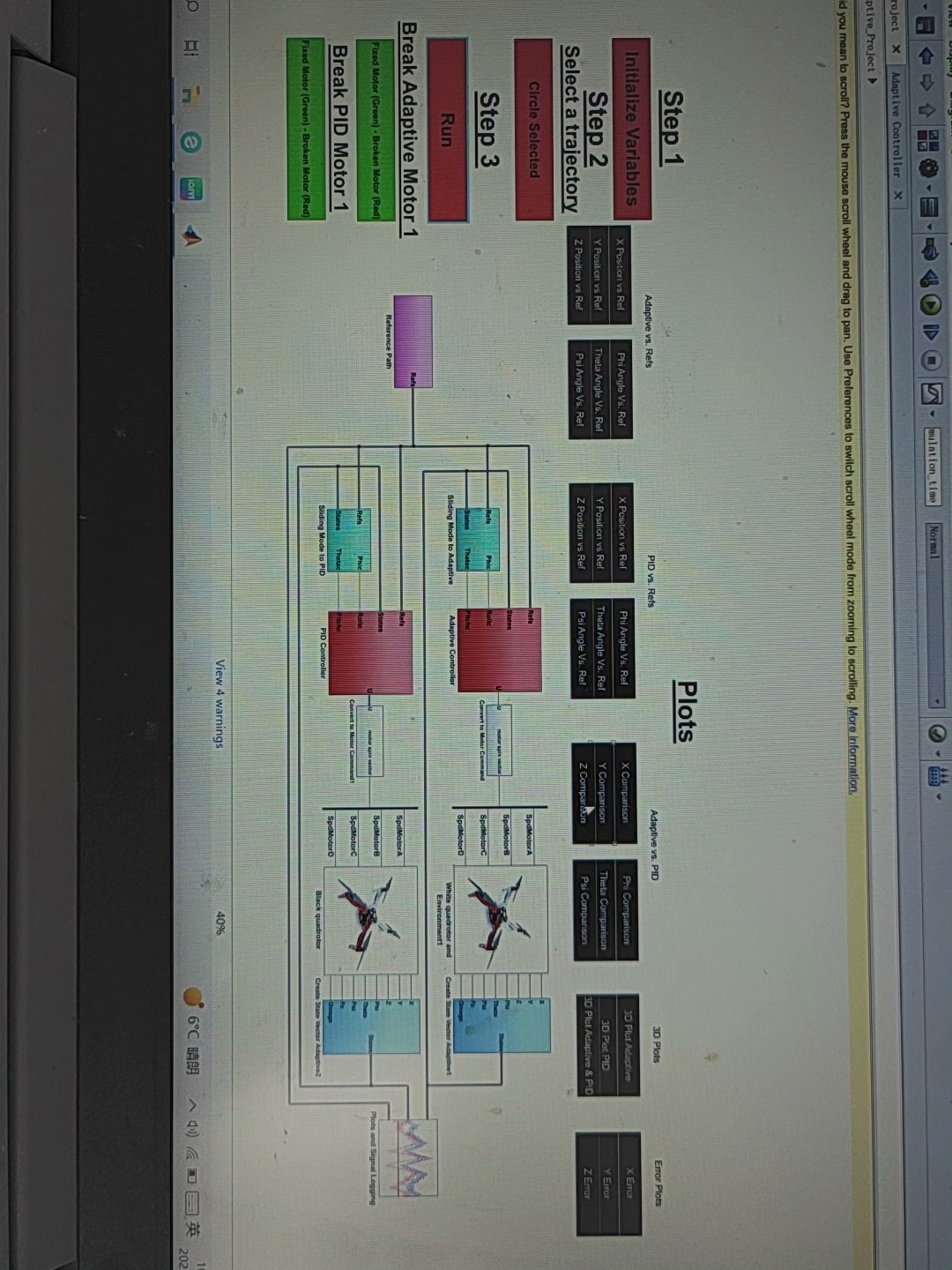
四旋翼飞行器自适应或Pid姿态位置控制,可以对比输出,也可以选择其中一种算法输出,包含多个性能指标输出,可直接运行
ID:5260704306212252
t***1
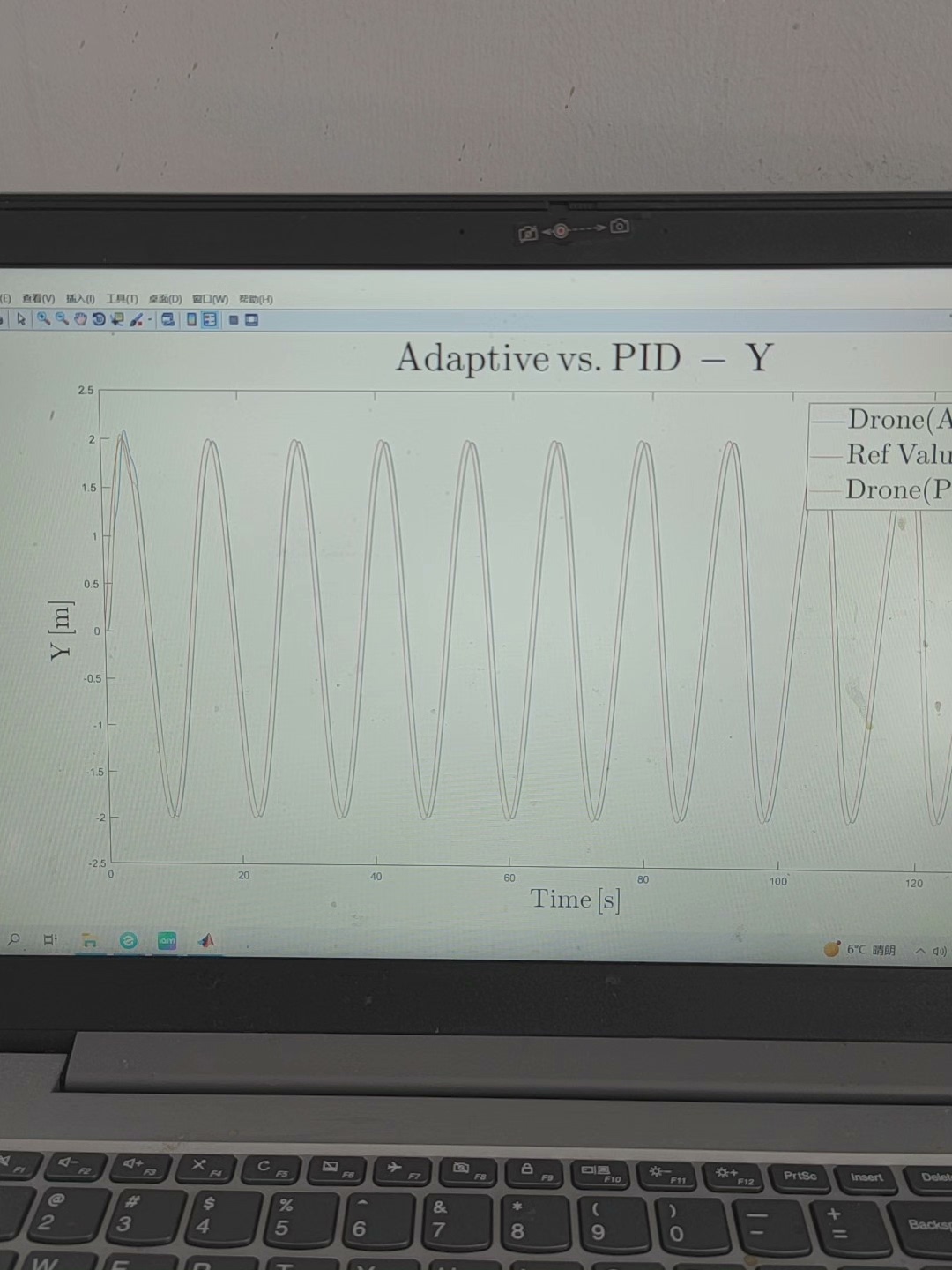
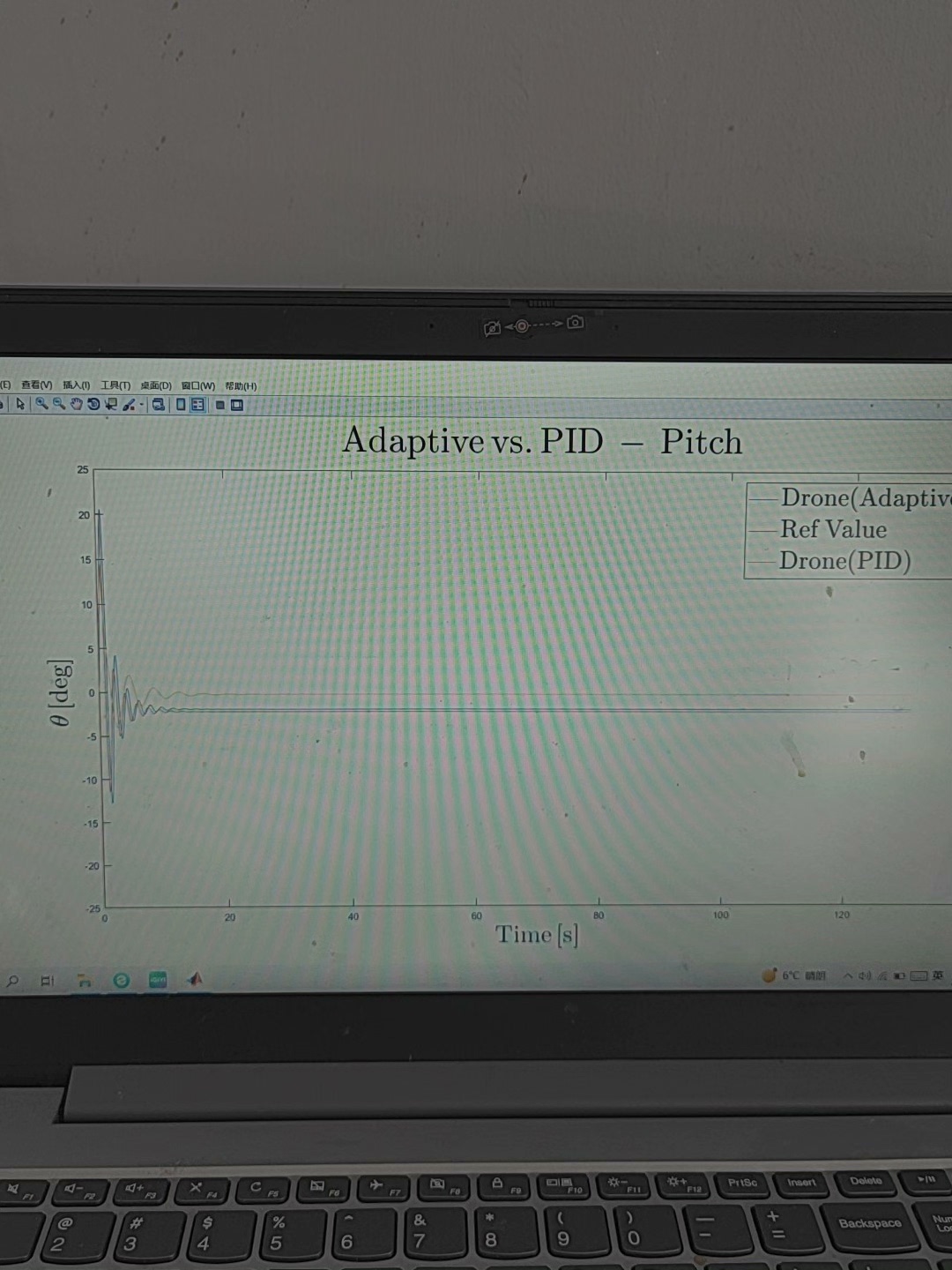
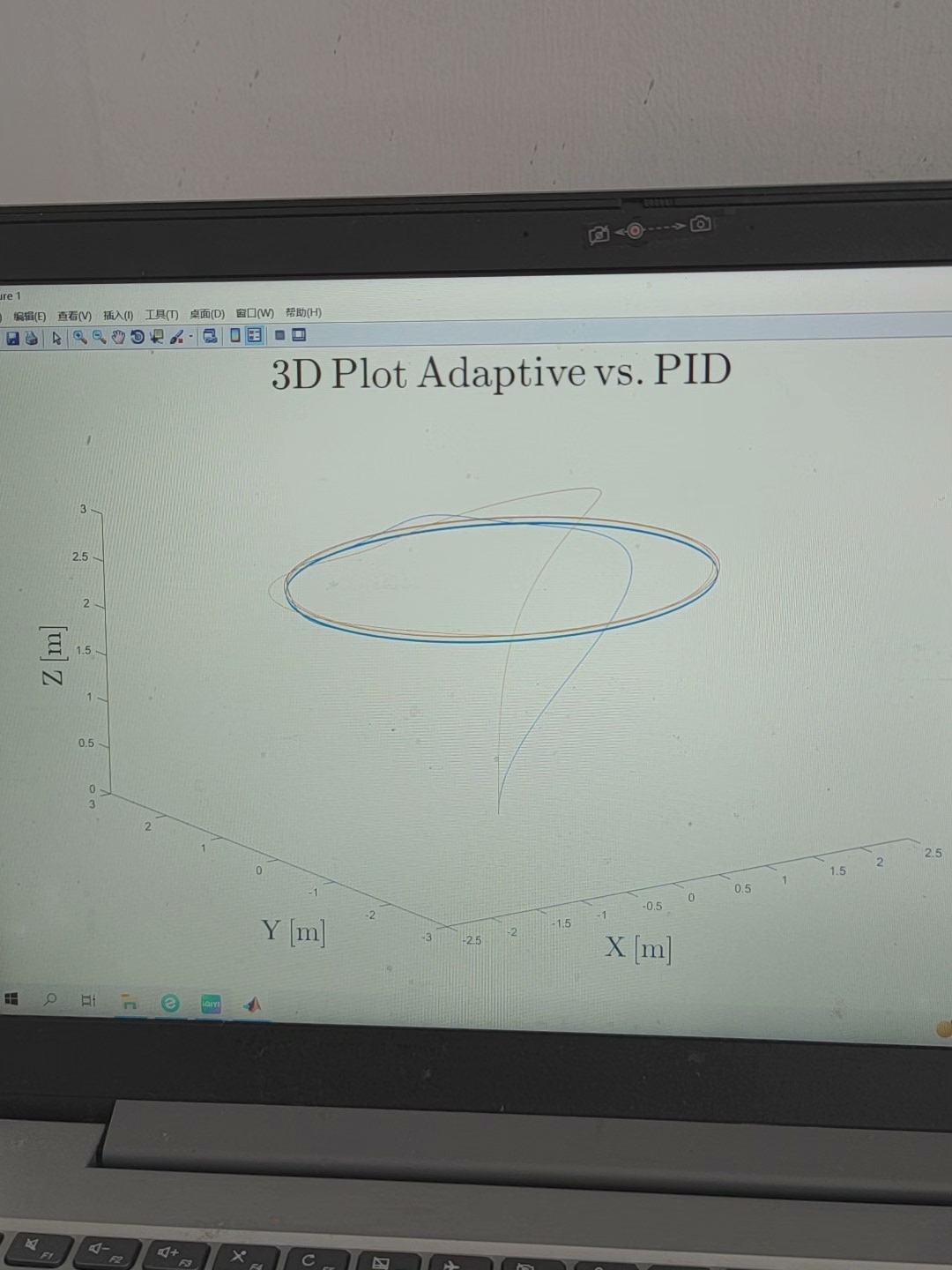
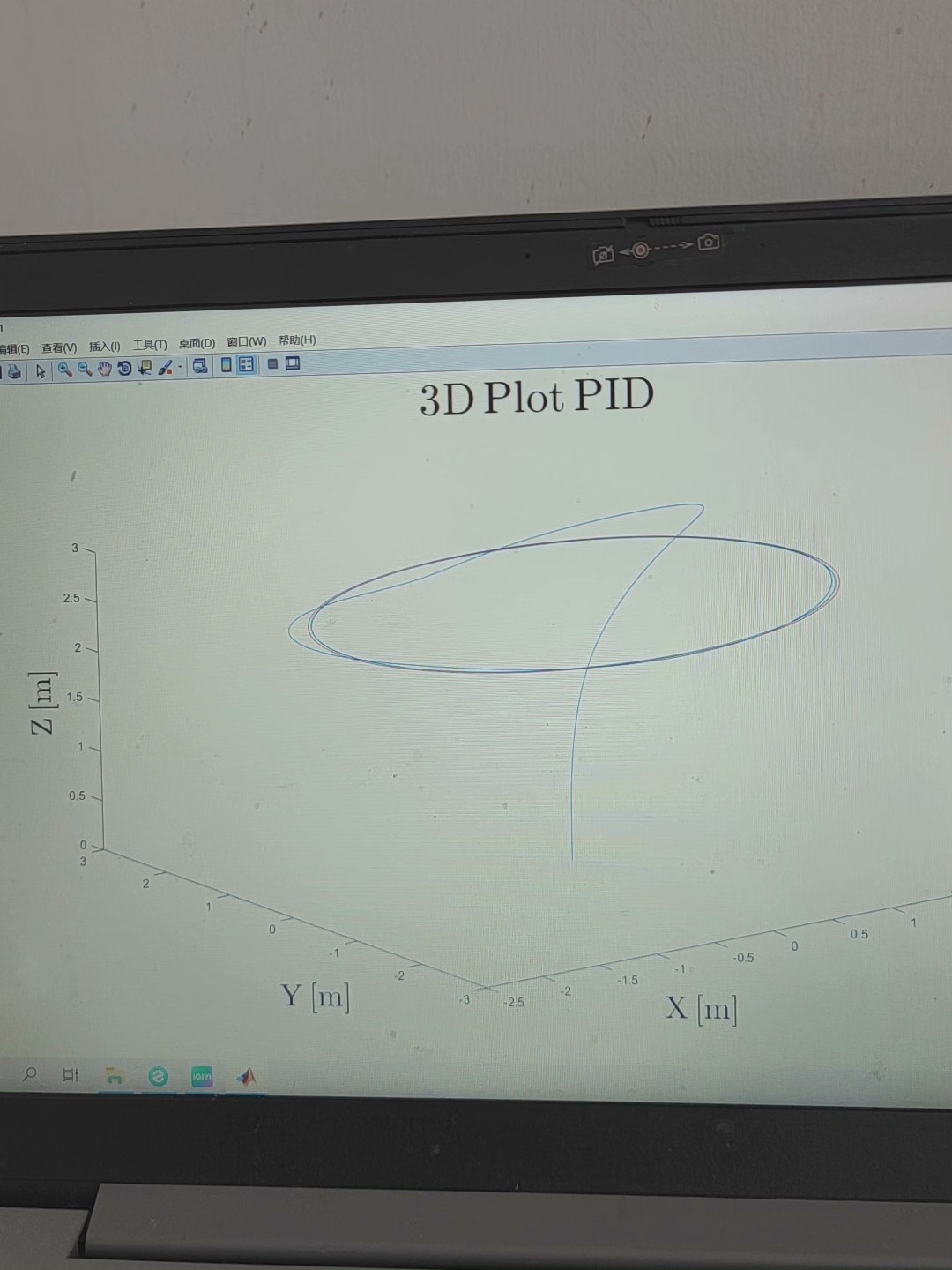
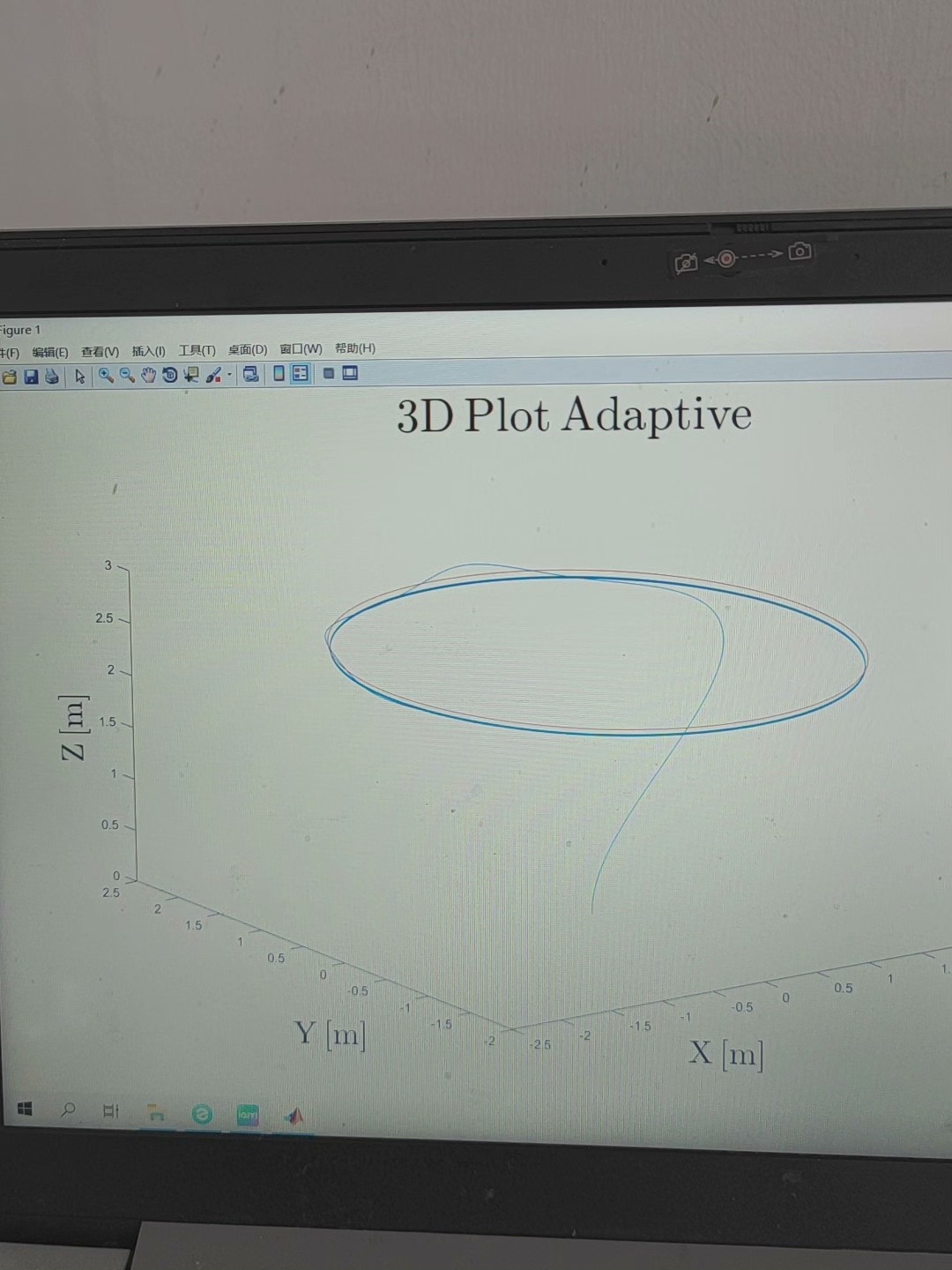
四旋翼飞行器自适应或PID姿态位置控制是无人机领域中的一项关键技术。在无人机的飞行过程中,姿态位置控制的准确性和稳定性对于飞行器的安全和性能至关重要。本文将介绍四旋翼飞行器的自适应和PID姿态位置控制算法,并对其进行性能指标的分析和对比。
首先,自适应控制是一种能够根据外部环境和参数变化自动调整控制策略的控制方法。四旋翼飞行器的自适应控制算法可以根据飞行器外部环境的变化,自动调整控制器的参数,以提高飞行器的控制精度和稳定性。自适应控制算法可以基于飞行器的动态模型来估计环境变化对控制系统的影响,并通过在线参数调整来适应环境变化。通过使用自适应控制算法,飞行器可以在不同的飞行环境下具备更好的适应性和鲁棒性。
其次,PID控制是一种常用的姿态位置控制算法,也是四旋翼飞行器最常用的控制方法之一。PID控制通过计算误差的比例、积分和微分部分来生成控制信号,以调整飞行器的姿态和位置。比例项通过将误差与设定值进行比较,反映了当前误差对控制量的影响程度。积分项通过对误差进行积分,可以消除系统的静态误差。微分项通过对误差变化率的测量,可以预测系统的未来发展趋势,从而提前采取控制措施。PID控制算法简单易实现,且对系统参数的变化具有较强的适应性。
控制系统的性能指标是评价控制系统性能的重要指标。常见的性能指标包括稳态误差、超调量、调节时间等。稳态误差指控制系统在稳态下与设定值之间的差距,可以衡量控制系统的静态精度。超调量指控制系统在初始阶段对设定值的超调程度,可以衡量控制系统的动态特性。调节时间指控制系统从初始状态到达稳态所需要的时间,可以衡量控制系统的响应速度。通过对比输出的性能指标,可以评估不同算法在不同环境下的适用性和优劣,以选择最佳的控制算法
【相关代码,程序地址】:http://fansik.cn/704306212252.html


















 7919
7919

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









