






四旋翼无人机PID模型,飞行器本体模型,位置控制,姿态控制,控制分配和电机控制。
ID:8829702226264617
智控科技

四旋翼无人机是一种飞行器,由四个电动马达驱动四个旋翼,可以实现垂直起降和悬停飞行。为了能够精确控制无人机的飞行姿态和位置,我们需要设计一个有效的控制系统。PID控制器是一种常用的控制器,适用于许多控制问题。
PID控制器是一个闭环反馈控制系统,由比例(P)、积分(I)和微分(D)三个部分组成。比例部分根据当前误差决定输出,积分部分根据过去的误差决定输出,微分部分根据误差变化的速率决定输出。PID控制器的目标是通过调节输出来使得系统的误差最小化。
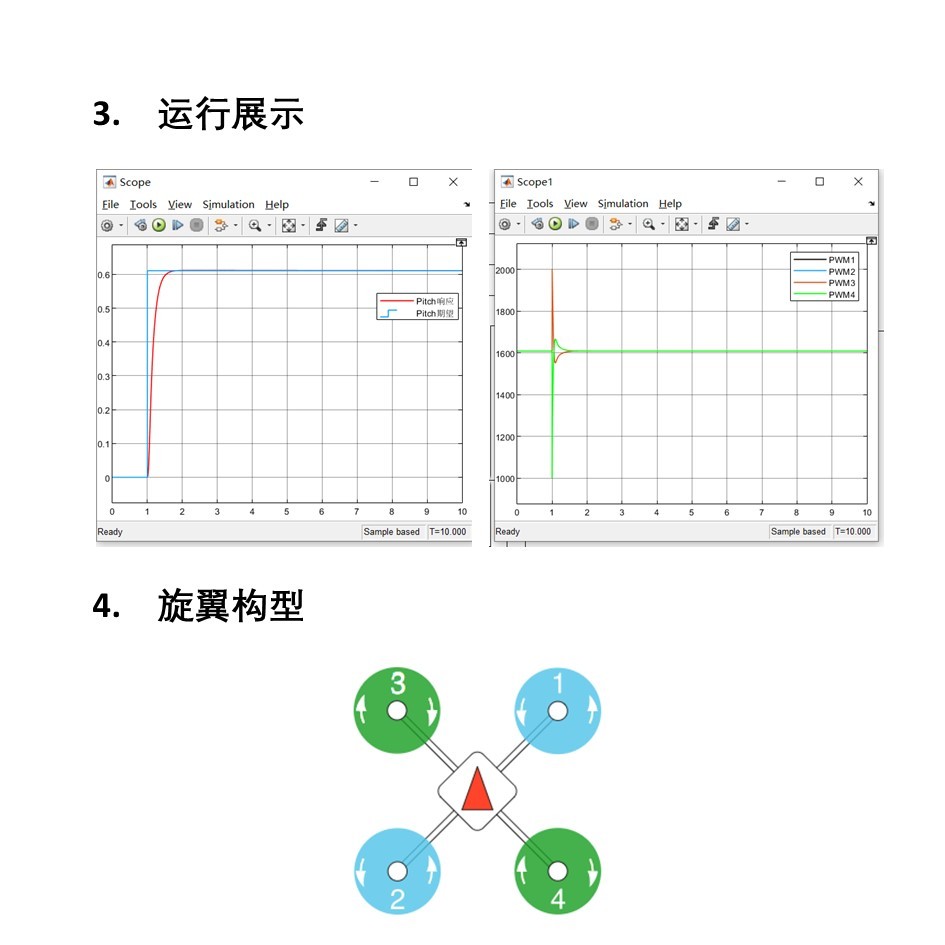
在四旋翼无人机中,PID控制器被广泛应用于飞行姿态控制和位置控制。飞行姿态控制是指控制无人机在空中的姿态,包括俯仰、横滚和偏航角。位置控制是指控制无人机在空中的位置,包括经度、纬度和高度。
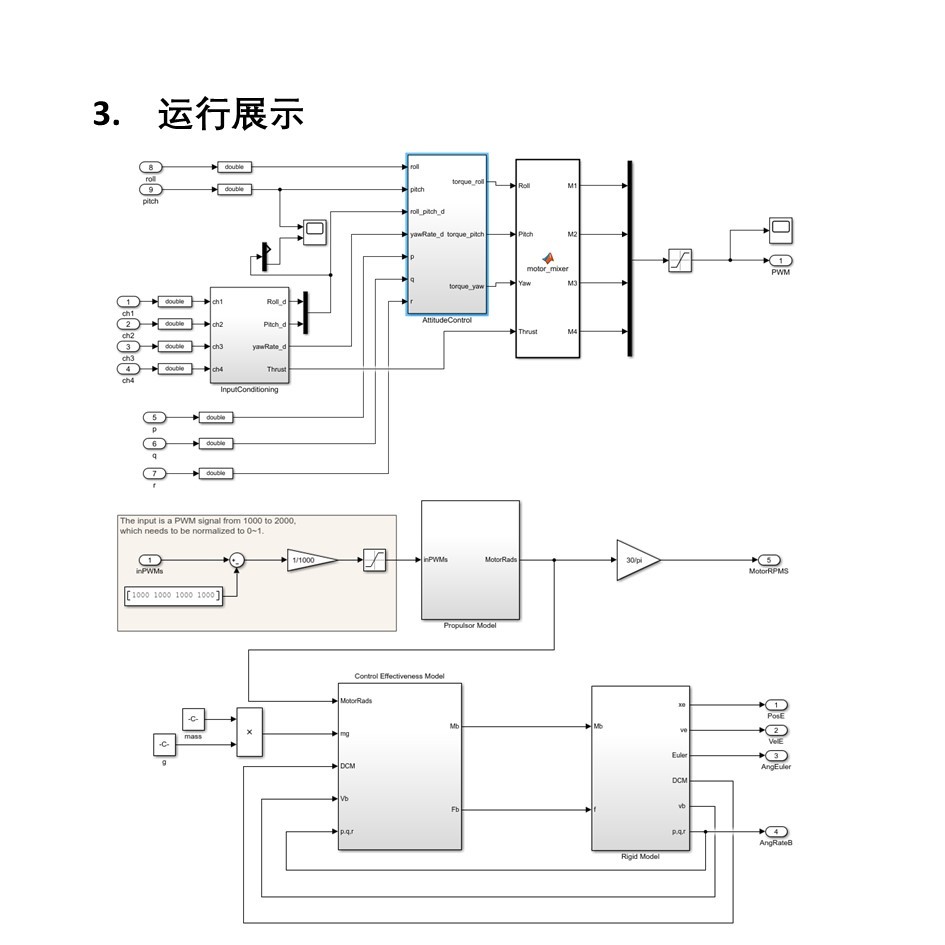
在飞行姿态控制中,我们可以将四旋翼无人机抽象为一个飞行器本体模型,该模型包含了无人机在空中的物理属性和运动特性。控制器通过测量无人机的姿态和期望姿态之间的差异,计算出适当的控制信号,以调整四个电动马达的转速,从而实现无人机的姿态控制。
在位置控制中,我们需要进一步考虑控制分配和电机控制。控制分配是指在位置控制中将期望姿态转化为适当的电机控制指令。电机控制是指根据电机转速的反馈信号,控制电机的转速来实现位置控制。通过PID控制器对位置误差进行反馈调整,可以使得无人机在空中精确控制位置。
总结起来,四旋翼无人机的PID模型涉及飞行器本体模型、位置控制、姿态控制、控制分配和电机控制。PID控制器是一个基于闭环反馈的控制系统,通过比例、积分和微分三个部分来调节输出,以实现无人机的精确控制。在实际应用中,我们可以根据无人机的具体需求和性能要求,调整PID控制器的参数来优化控制性能。这种控制方法可以应用于无人机的自动驾驶、航拍摄影等领域,为无人机的安全稳定飞行提供了有效的技术支持。
【相关代码,程序地址】:http://fansik.cn/702226264617.html


















 8019
8019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









