







 ProfControlV8是一款面向智能工厂和智慧物流的全组态控制系统,支持AGV配置、地图绘制、导航算法和协议设置。用户可进行地图绘制,AGV视图和模型配置,以及AGV仿真导航和协议配置。系统采用先进UI设计,提升图形性能,兼容多种导航方式,满足复杂环境的导航需求。
ProfControlV8是一款面向智能工厂和智慧物流的全组态控制系统,支持AGV配置、地图绘制、导航算法和协议设置。用户可进行地图绘制,AGV视图和模型配置,以及AGV仿真导航和协议配置。系统采用先进UI设计,提升图形性能,兼容多种导航方式,满足复杂环境的导航需求。
目录
ProfControl V8是一款全组态的面向智能工厂及智慧物流的自动化控制系统。
ProfControl V8是一款全组态的面向智能工厂及智慧物流的自动化控制系统。

-
先进的UI设计以满足日益增长的现场设备数量,确保在极度复杂的地图及设备情况下的高效运行。
全新的UI系统采用了最新的图形化技术,可以满足场景中同时拥有50k+以上元素的需求。比v6图形性能提高不低于20倍。
- 完全兼容磁导航、二维码导航及激光SLAM导航的全新的地图系统。
增加了贝塞尔路径、复合路径、B样条等全新的路径,完美支持SLAM导航中各种奇怪且特殊的行驶路径需求。
- 全新的导航算法,以满足复杂的棋盘格及SLAM导航需求。
基于遗传算法的全新导航规划,可以轻松应对复杂棋盘格导航的需求,且对于过道通行能力有限的导航需求具有先天的优势。
- 全新的规则算法,以满足不同现场极端的导航需求。
- 完整内嵌WCS及WMS,满足AllInOne系统的需求。
- 内嵌复杂坐标系统,支持多楼层,多区域的坐标拟合需求。
- 完全独立的协议模板,支持任意拓展各种现场设备。
-
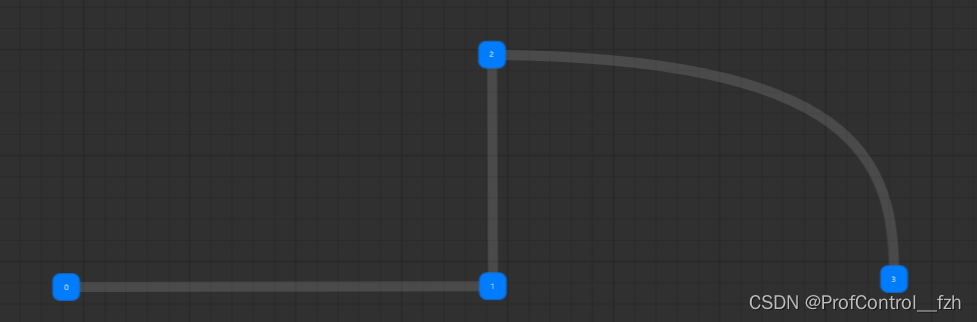
一、简单绘制一个地图
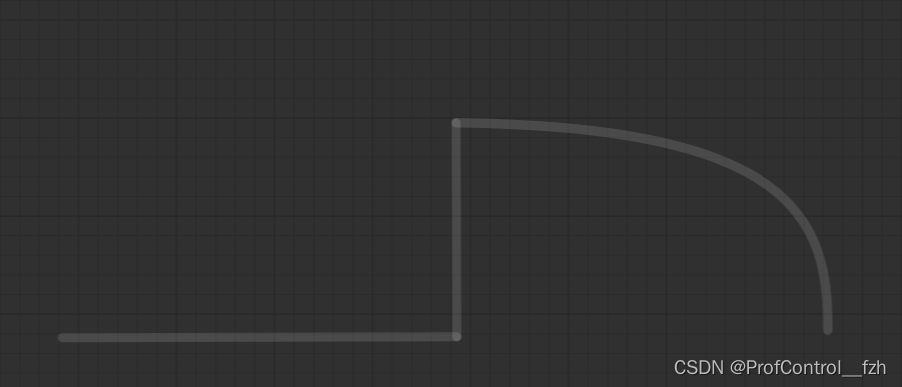
1.按住shift键,用鼠标框选住所画地图
2. 右击点击自动分割相交路径

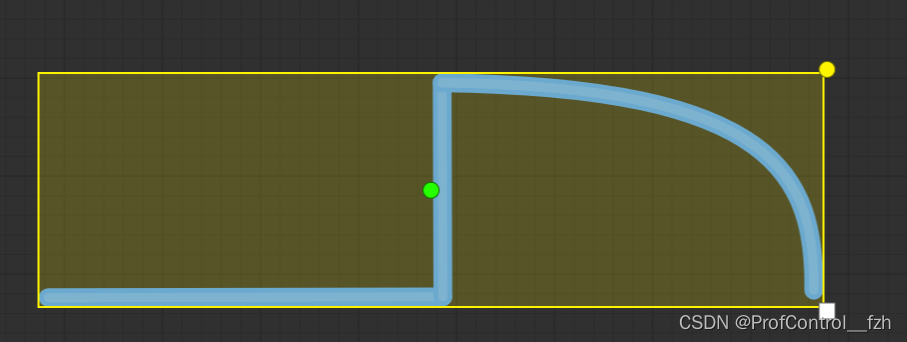
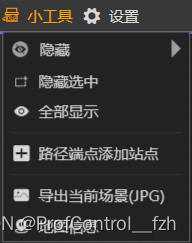
3.在上方工具栏中的小工具中选择【路径端点添加站点】
4.结果如图所示
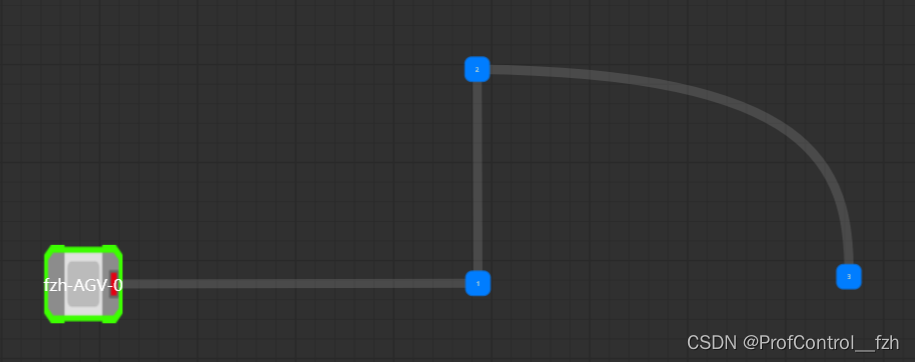
二、AGV的视图配置
1.在所绘制地图上放置AGV
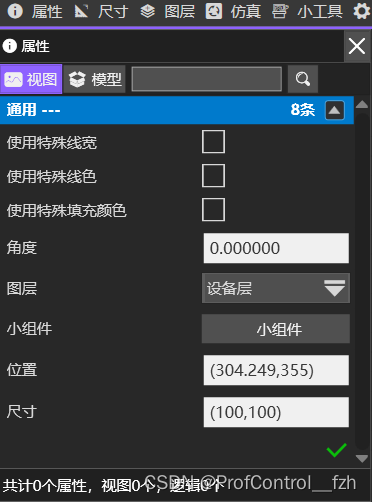
2.AGV视图配置
选中AGV,进行右击可以查看AGV属性或者直接点击上方属性。
可以设置
(1)AGV角度
(2)AGV尺寸
(3)AGV所在图层(默认设备层)
3.AGV模型配置
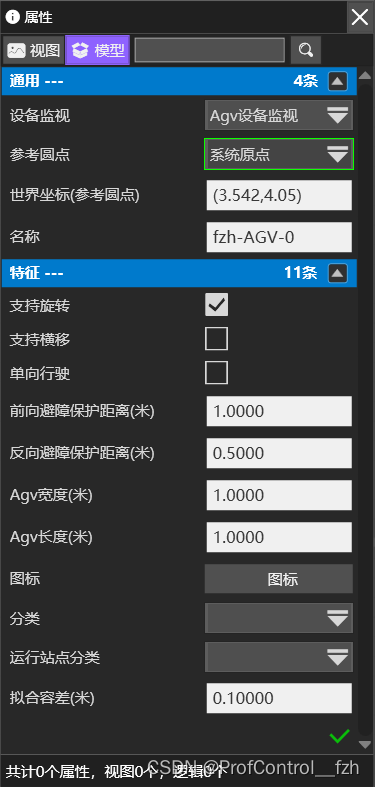
(1)通用设置
- 对AGV进行命名,调整坐标
(2)AGV特征
- AGV支持旋转
- AGV支持横移选项
- AGV单向行驶
- AGV前行、反向避障保护距离
- 设置AGV图标,可根据现场AGV样式选择对应AGV图标

- AGV分类
对不同类型的AGV进行分类
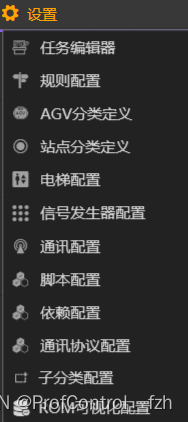
【1】在上方工具栏设置中选择【任务编辑器】

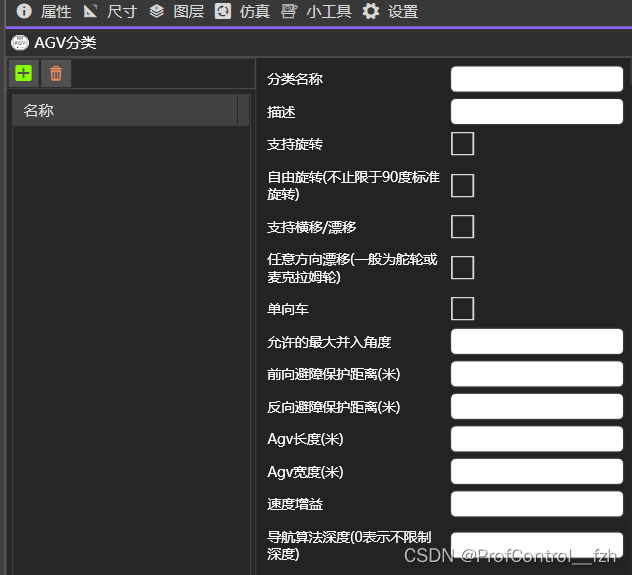
【2】 点击左上角绿色加号,设置AGV属性保存
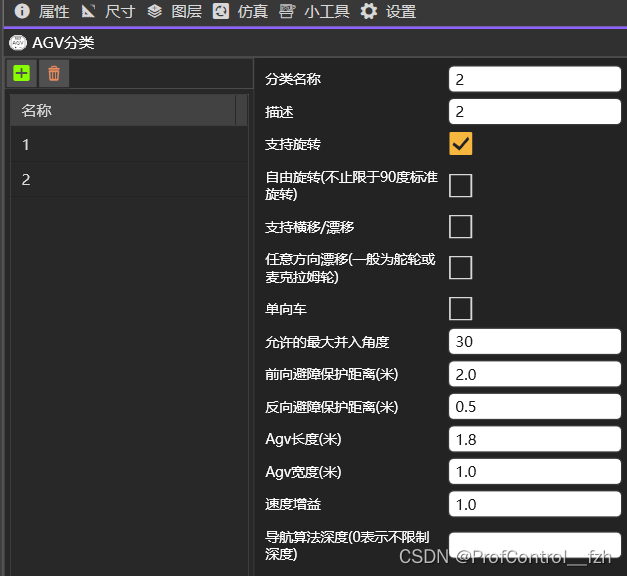
【3】可以在单一AGV属性页面下进行选择归属分类
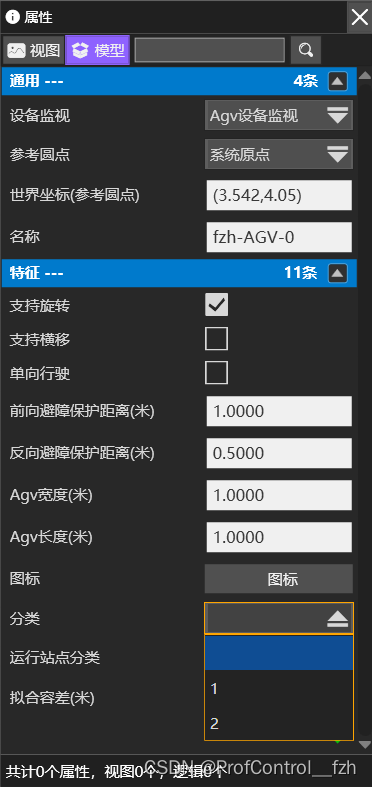
(3)AGV附加属性
可以选择AGV的其他配置属性
三、AGV仿真导航及协议配置
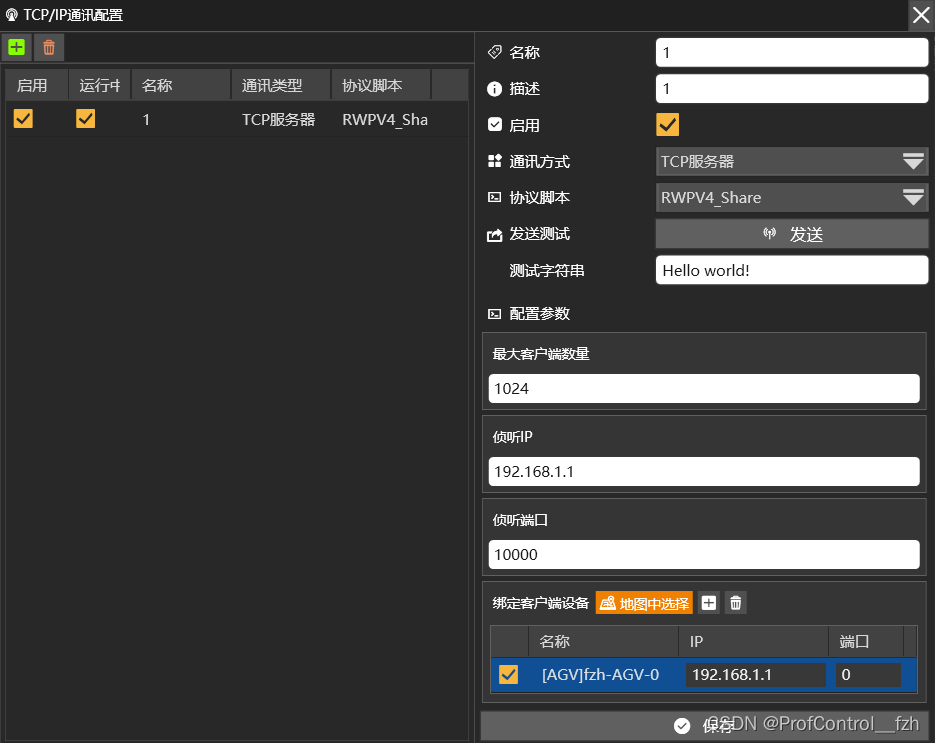
1.配置协议
(1)在上方选项卡的设置中,选择【通讯协议配置】

(2)将RWPV4_Share进行添加至右侧
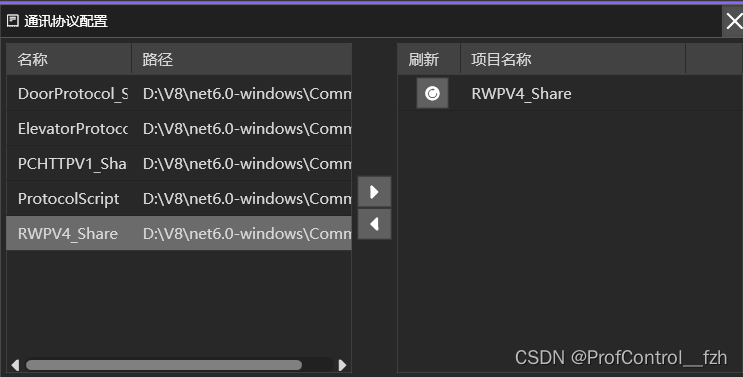
(3)回到设置选项卡下【通讯配置】选择添加,注意要点击绑定客户端设备,在地图上选中要绑定的AGV设备,为AGV添加IP地址。
2.仿真导航
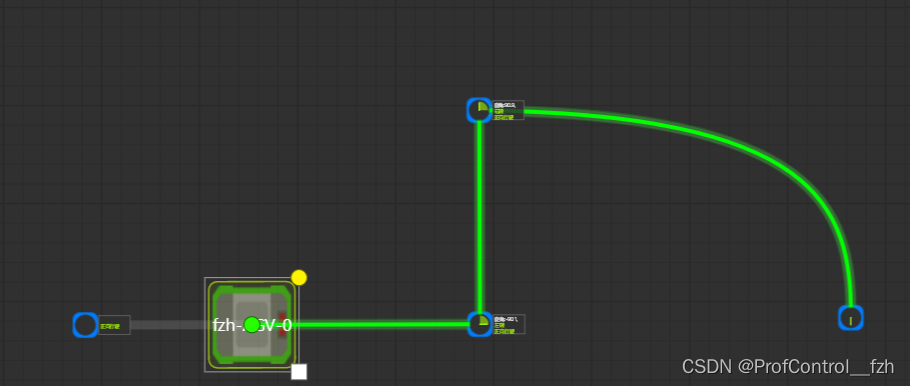
(1)在上方工具栏中选择仿真选项卡中的【开始仿真】
(2)进入仿真模式
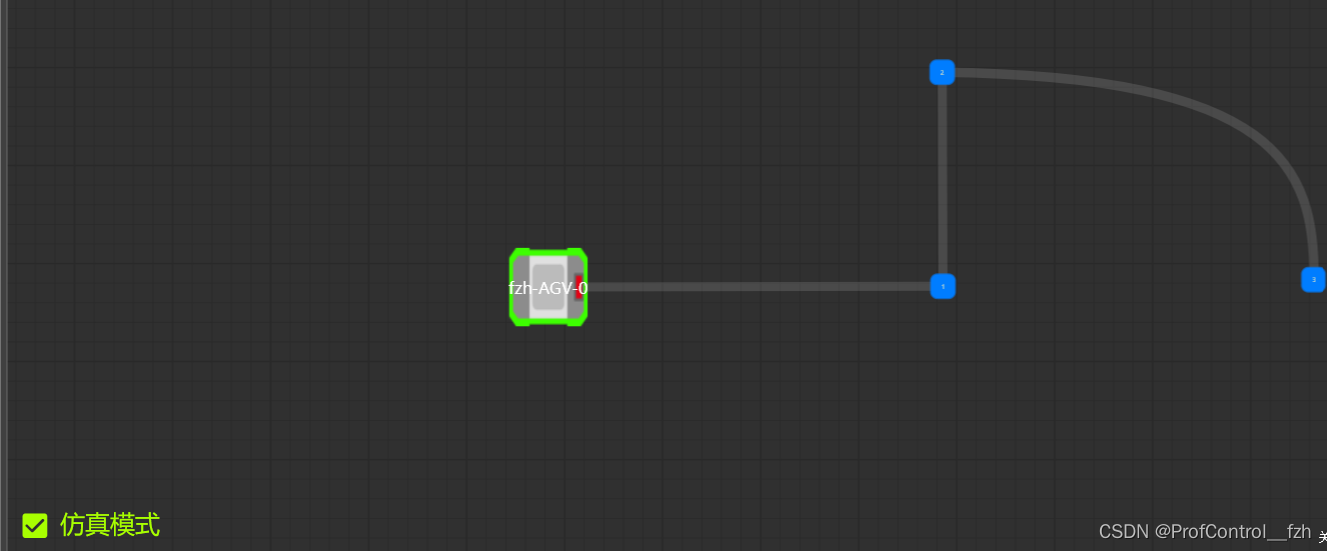
(3)三种仿真方法
第一种:
选中需要导航的AGV右击,选择【导航】,出现请选择需要导航的目标站点后,选择站点。


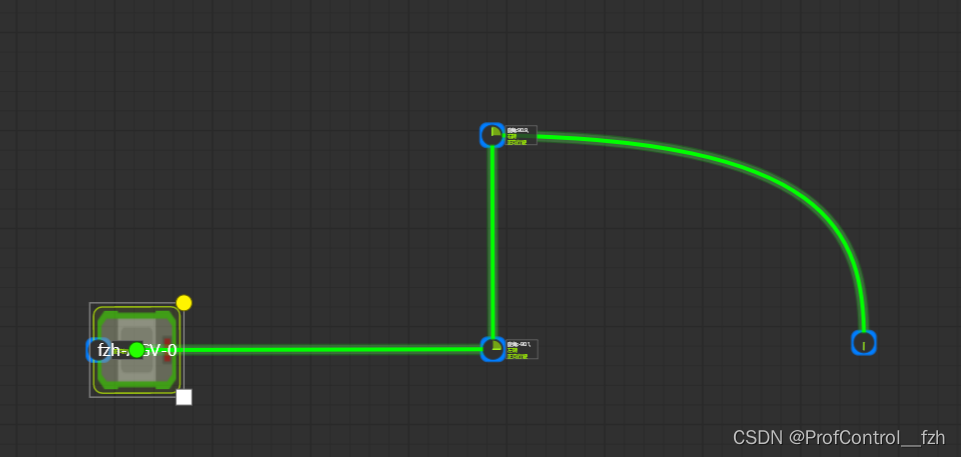
第二种:
按住键盘U键,鼠标点击AGV根据提示再点击需要导航的点,完成导航(输入法需要为英文)
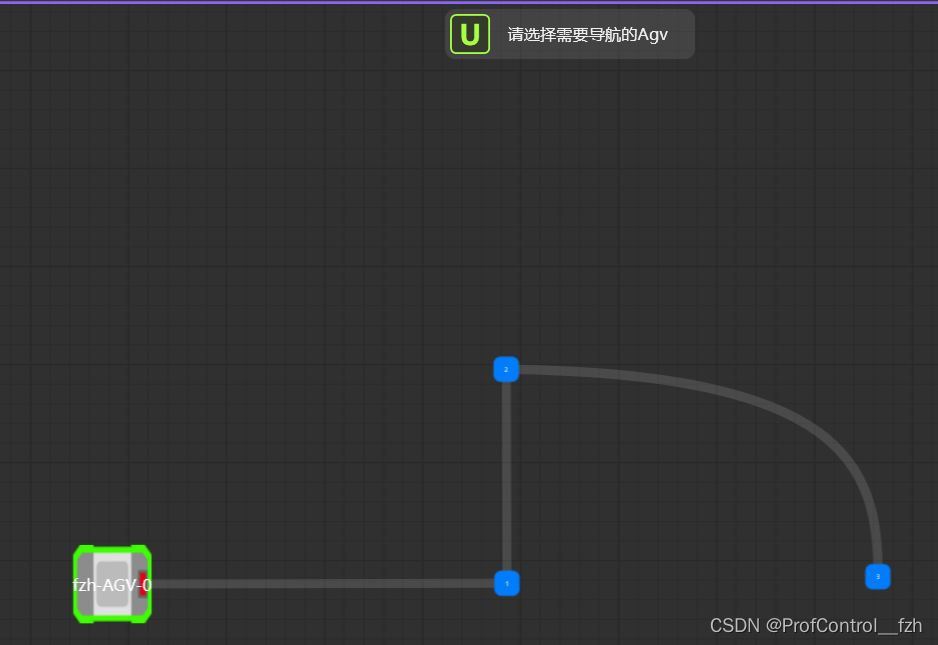

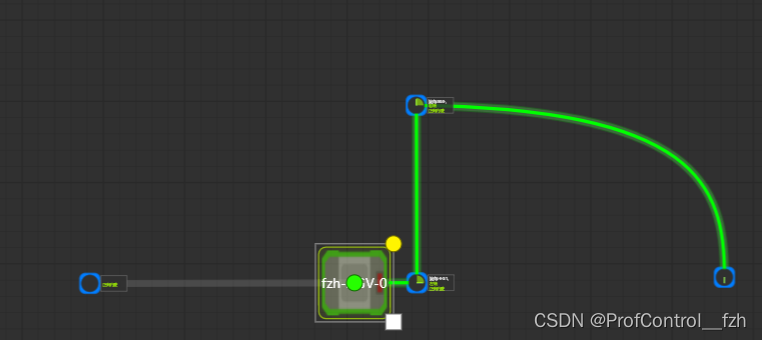
第三种:
设置选项卡下的任务编辑器中选择AGV和AGV需要导航到的点位


四、实习分享
Profcontrol平台,以移动机器人AGV调度控制软件为核心,为物流领域的无人化,制造领域的柔性化,提供软件及服务。
记录在Profcontrol平台实习过程中的学习心得,有不足的地方欢迎大家评论区咨询讨论。
平台官网:讯易铂控,环野电子 (profcontrol.cn)
哔哩哔哩视频链接:【ProfControl V8.0 之绘制地图——AGV(学习之路)】 https://www.bilibili.com/video/BV1es4y167Wp/?share_source=copy_web&vd_source=f61ba19a0ee4955281848e3a6cba60cb

















 1141
1141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









