






摘 要:新技术、新制造的出现和发展,极大方便了人们的生产生活,对于一些正在蓬勃发展中的领域来说,机器人在其中充当了十分重要的角色。使用机器人可以在一定程度上直接或间接替代人类的直接操作,比如在一些危险的环境中,机器人代替人工去完成任务,能够达到更好地效果,并防止人员受到伤害,而且完成的效果也更加好。随着机器人领域的不断推陈出新,各种形式的机器人不断出现在工业生产和日常生活中,许多行业也更加关注机器人的发展进程。
本次毕业设计主要设计了一种球形机器人,通过单片机进行控制,从而实现所需要的功能。本论文主要进行以下研究:①对球形机器人进行结构设计②对控制系统进行设计,选择单片机型号③对球形机器人进行运动分析④设计软件开发环境并进行程序设计⑤对本文的研究进行总结分析,并进行展望。
关键词:球形机器人 智能控制 STM32
目 录
1.前言 1
1.1 课题的研究背景及意义 1
1.2 国内外研究现状 1
1.3 研究内容及创新性 3
1.3.1 研究内容 3
1.4 本章小结 4
2 球形机器人总体结构设计 5
2.1 基本框架 5
2.2 方向舵机选型 6
2.2.1 转速和扭矩 7
2.2.2 方向舵机的控制 7
2.3 步进电机选型 9
2.3.1 步进电机驱动方式 9
2.3.2 步进电机的主要特性 10
2.4 主动轮设计 10
2.5 转向机构设计 12
2.6 本章小结 13
3 控制系统硬件设计 14
3.1 核心控制模块 14
3.1.1 功能 14
3.1.2 应用 15
3.1.3 STM32最小系统 15
3.2 电机驱动模块 16
3.2.1 ULN2003概况 16
3.2.2 ULN2003的使用方法 16
3.3 姿态检测模块 17
3.3.1 MPU9250概况 17
3.3.2 IIC通信协议 17
3.3.3 MPU9250数据处理 18
3.3.4 MPU9250使用方法 18
3.4 蓝牙通信模块 19
3.4.1 HC-05概况 19
3.4.2 HC-05使用 19
3.5 遥控制作 20
3.6 本章小结 21
4 系统软件设计 22
4.1 单片机与模块的连接 22
5.2 软件开发环境的实现 24
5.2.1 开发语言 24
5.2.2 Keil uVision5 MDK的使用 24
5.3 程序设计 25
5.3.1 程序流程图 25
5.3.2 程序代码 26
5.4 本章小结 28
结 论 29
参考文献 30
致 谢 32
球形机器人总体结构设计
基本框架
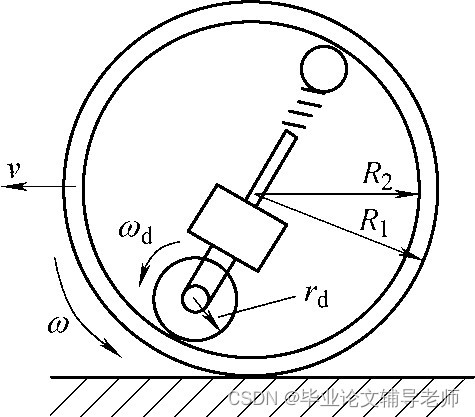
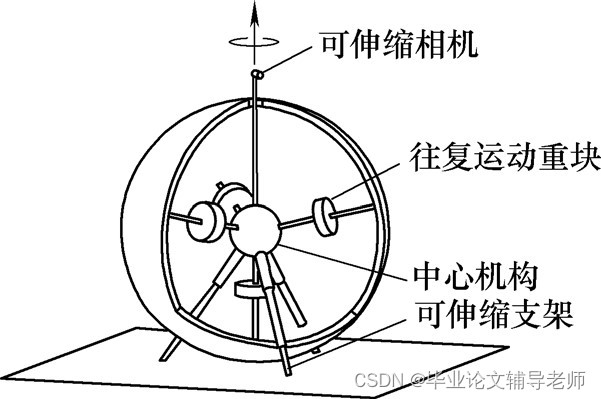
本次设计的球形机器人通过内部的偏置结构和底部通过电机驱动的主动轮产生动能,从而改变其运动状态。主动轮和球形机器人的外壳内部直接接触,通过摩擦转移能量,驱动球形机器人的转动。对于球形机器人的旋转运动,则通过偏置结构完成,偏置结构主要是由支撑件和其上安装的旋转舵机以及支撑件四周的万向滚珠组成。采用万向滚珠是因为其能够保证偏执结构将转弯所需的能量传递到球形机器人的外壳上。对于由步进电机驱动的主动轮,其上设置有连杆,连杆的一端固定在支撑件上,使得两者成为一个整体。对于转弯时,连杆始终位于球形机器人内部质点所在的平面上,这种布局方式能够简化球形机器人的控制,并减少多余因素的影响,从而造成不必要的误差,并保证整体的平衡。
支撑件的一端平面上可用于当值传感器和微型处理器,另一端则设置电池盒,用于为整个系统进行供电。考虑到电池自身的重力,在电池盒的另一端设置配重块,用以保证球形机器人的平衡。应该考虑几个方面的因素:
(1)球形机器人内部所有部件的布局安排,及其之间的相互影响。
(2)考虑球形机器人的尺寸并不是很大,需要分配合适的放置空间。
(3)对于设计的支撑件,要能够支撑所需放置的部件,避免产生运动抖动。
因此,对于球形机器人的设计应考虑从整体考虑其布局,并对其可行性进行分析,为后续的研究提供保证。图2.1为本次设计的总体结构设计图。


















 134
134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









