







1 背景
机器人技术发展了很多年,从足式,轮式,半足半轮式以及爬行式的仿生机器人层出不穷。最近在看奇特的机器人产品时,发现了一款比较有意思的机器人,在 2023 东莞“机器人+”大会展览上,出现了一款球形机器人,其不同于双足、四足、多足、履带、轮式等机器人的传统特征形态,而是球状。
笔者最开始也非常好奇,后来经过对相关论文以及专利的翻阅才知道它的原理,本篇博客主要介绍的就是浙江大学为主体单位孵化出的这款球形机器人。
2 球形机器人
2.1 团队介绍
球形机器人的研究团队:负责人为浙江大学博导王酉教授,同时也是逻腾科技创始人。王酉教授长期从事生物传感器、机器人和机器学习方面的研究和教学,在尖端技术及其产业化方面做出了卓越的工作;在机器人领域开展研究和教学,研制智能球形机器人并进行产业化。
2.2 结构&驱动
(1)设计灵感与背景
设计灵感来源于瑞典乌普萨拉大学的水星探测器课题。球形机器人属于机器人领域一个新的分支,可借鉴前人的东西并不多,在研发过程中必然要考虑可能遇到的挑战。比如,球形机器人在复杂地形下穿越障碍的能力;如何让球形结构在穿越复杂地形时保持相对的平衡。
(2)结构与驱动原理
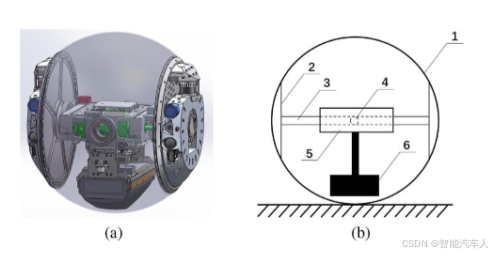
- 结构:球形机器人由球壳和内部的驱动装置等组成,球壳可以封装电机、传感器、控制器和电源等各种内部组件。
- 驱动原理:利用 “球形结构 + 摆锤驱动 + 高速滚动” 的运动原理。通过改变机器人的重心位置来激活内部驱动电机,从而实现球形机器人的滚动,这种运动方式克服了现有轮式和腿足式机器人的原生缺陷。
球形机器人的运动原理主要有两种:一种是通过质心偏移,机器人在重力矩的作用下运动;另一种是保证机器人的质心永远位于地面接触点的正上方,从而在接触点处的重力矩为零,机器人基于角动量守恒原理运动。王酉教授表示,从实际出发考虑的话,控制球形机器人唯一有效的方式就是改变球壳内部的质心位置,利用质心位置变化形成重力分量的变化,给球体一个相应的驱动力。基于这个原理,质心偏移型球形机器人,按照其内部结构分类主要有三种形式:摆锤驱动、小车驱动,以及多质量块驱动,其中,摆锤驱动是最为灵活的一种,而小车驱动和多质量块驱动两种方式,缺点明显,即移动速度和质量块重量等存在限制。
球形机器人想要越过障碍物,其运行的核心在于速度。王酉教授在谈及球形机器人越障时表示,“从运动控制的角度来说,球形机体最高效的越障驱动方式就是摆锤,不仅是因为球壳的尺寸可以很大,而且利用电机拉起后摆锤,就可以极短的时间内获得较大的速度,球体同时也会获得相应的驱动力和加速度,这样就可以实现越障了”。目前,逻腾科技已实现全技术自主化,同时产品可以在面对高可用性、高对抗性、高稳定性、高鲁棒性、高能效比要求的专业级市场要求时,依旧表现出色。
(3)性能优势
- 环境适应性强:球形机器人的外壳坚固且全密封,具有良好的环境适应性。相比传统的移动机器人,它更能适应复杂的环境条件,例如在恶劣的天气、崎岖的地形等环境中仍能正常工作。
- 稳定性好:球形的结构设计使其具有较好的稳定性,在运动过程中不易倾倒或失衡,能够保证机器人的正常运行和任务执行。
- 能效比高:在地面上滚动所消耗的能量相对较少,具有较高的能效比,能够延长机器人的续航时间和工作时长。
(4)应用
- 王酉团队研发的球形机器人在安保、军事、科考等领域具有广阔的应用前景。例如可以用于化工厂巡检监测、民用设施安防巡检、水质监测和动植物保护、军事两栖观察侦测等任务。
2.3 智能化
随着科学技术的发展,机器人在人类的生活和工作中扮演着越来越重要的角色。其中,移动机器人是机器人领域的一个重要分支,目前市场上使用较多的产品,主要以轮式、腿足、四足,以及履带为主,同时还有一些少见的类型,比如爬行,球仿生类等。
除了上一小节介绍在结构动力方面的性能,智能化当然也是该球形机器人的另一大特点。在讨论王酉教授的球形机器人时,其模式还是传统感知+规控,因此本小节仍然分为两个小部分。
(1)感知
球形机器人在运动的过程中,它的姿态会不停地发生变化,包括晃动、震动等,如何在姿态频繁变化的情况下,实现机器人对外部的全方位感知。利用‘昆虫复眼’这样一个仿生学中的概念,通过多个摄像头构成全场景感知,根据球体本身的姿态参数,对信息进行校准,选取方位角合适的传感器数据形成感知图像。

球形机器人在运动过程中,可以依靠仿生“昆虫复眼”的全景感知系统实现稳定、无干扰的信息获取。通过信息系统的综合处理以及参数校准,去除运动过程中产生的数据抖动。多传感器综合获取周边环境的信息,使得机器人可以完成自动避障。(摄像头的视角一直在旋转,需要抓取正常视角下的图像并做匹配融合)
此外,还开发了一种基于半全局匹配算法的球形机器人视觉障碍物检测方法。
感知系统分为两个子模块:
- 第一个子模块是感知系统,负责生成周围环境的障碍物等感知信息。
- 第二个子模块是监控系统,它从 IMU 和摄像头数据中读取,并在图像稳定处理后读取监控数据录制或上传到后台供操作员使用。
使用两侧的两个摄像头,基于OpenCV的Semi‐Global Block Matching (SGBM) 算法获得空间障碍物信息。SGBM概念及原理介绍如下:
在计算机视觉领域,尤其是立体视觉中,准确地估计两个相机拍摄的图像之间的视差是一个关键任务(有点像双目)。视差信息可以用于恢复场景的三维结构,对于许多应用如自动驾驶、机器人导航、三维重建等都具有重要意义。Semi-Global Block Matching 算法就是为了高效且准确地计算视差图而提出。
- 块匹配:该算法基于块匹配的思想,即将一幅图像中的一个小块(通常是矩形区域)在另一幅图像中搜索与之最相似的区域,这个相似性通常通过某种匹配代价函数来衡量。
- 视差:找到的最相似区域在水平方向上的位移就是该小块的视差。对于整个图像中的每个像素点或小块,都进行这样的搜索和匹配过程,就可以得到整幅图像的视差图。
(2)定位
首次提出了一种基于运动特性的球形机器人轮式里程计算法和电子图像稳定 (EIS) 算法。其实上面提到的EIS算法主要用于融合定位系统,它融合GNSS、IMU 和电机编码器等传感器的原始数据,生成融合定位结果。
原理相对来说比较简单,主要通过多种传感器的融合,对比如IMU,GNSS,编码器的采集的数据进行卡尔曼滤波和融合,提高定位精度。
(3)规划控制
- 规划模块
由于球形机器人的运动特性不同于传统的轮式,基于球形机器人的运动特性在运动学约束重新设计了节点的探索方式。
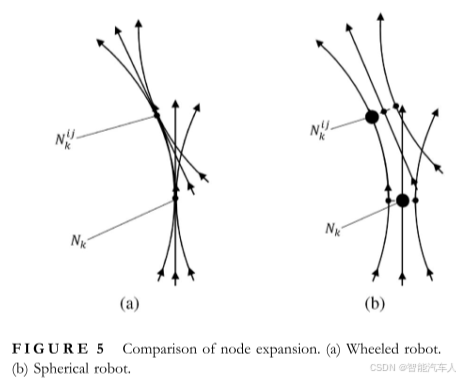
除了上面提到的节点搜索方式不同外,还提出了一种三圆覆盖策略作为无碰撞约束,其它方面倒是和传统Hybrid A*方法差别不大。关于Hybrid A*更详细的知识可参考笔者之前写过的博客《自动驾驶---OpenSpace之Hybrid A*规划算法》。
- 控制模块
球形机器人的本质,是一个不倒翁,而不倒翁是具有一定的稳定性的,但是如何让其遵循规划进行角度偏转,就需要对球体进行控制。对球体本身而言,因其自身姿态会影响运动方向,所以如何实现对球形机器人的运动姿态控制,就成为了行业难题。王酉教授介绍,“对于球体而言,控制的核心就是对三个姿态进行控制,包括俯仰角、翻滚角和航向角,这三个姿态同时控制难度极大,我们的解决方案就是通过建立相对准确的运动学、动力学模型,然后通过多种控制方法的集合,包括滑膜控制、自身控制、模糊控制等,从自动化的角度,通过建模仿真、模型测试,形成完整闭环的控制方法,基于准确的模型和控制方法,对球体的控制效果会更好。”
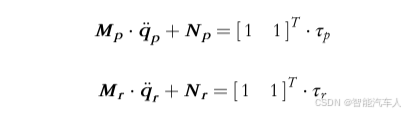
最复杂的部分就是运动控制了,在论文中占了很大的篇幅。从动力学建模到控制器设计,这也是机器人从业者的爱好之一。基于机器人的动力学模型总结了最新的运动控制算法,并在前人的基础上进行了一定的改进,例如增加了对速度的补偿控制器根据机器人当前的滚动角度。
动力学模型如下,在控制器方面分别设计了速度控制器以及方向控制器。有兴趣的读者可参考论文(浙江大学王酉教授主页),笔者在此就不详细介绍了。
3 总结
作为工程师,笔者还是非常希望更多的机器人能够应用到实际场景中,算法 +工程应用也是目前的一个大趋势。浙江大学王酉教授的球形机器人在结构设计、驱动原理和性能表现等方面具有独特的优势,比较新颖,并且为特种机器人的发展和应用提供了新的思路和方向。


















 301
301

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











