







基于YOLOv11的限速牌识别与检测系统
1. 研究背景与意义
随着智能交通系统(ITS)的快速发展,自动驾驶和辅助驾驶技术逐渐成为研究热点。限速牌作为交通标志的重要组成部分,为驾驶员提供了重要的道路限速信息。然而,在实际驾驶过程中,驾驶员可能会因疲劳、分心或环境干扰而忽略限速牌,从而导致超速行驶,增加交通事故的风险。因此,开发一种高效、准确的限速牌识别与检测系统具有重要意义。
YOLO(You Only Look Once)是一种基于深度学习的目标检测算法,以其高速度和准确性著称。YOLOv11作为YOLO系列的最新版本,在检测精度和速度上均有显著提升。本研究旨在基于YOLOv11算法,开发一种限速牌识别与检测系统,为智能交通系统和自动驾驶技术提供支持。

2. 研究目标
本研究的主要目标是设计并实现一种基于YOLOv11的限速牌识别与检测系统,具体目标包括:
- 限速牌检测:在复杂道路场景中实时检测限速牌的位置。
- 限速牌识别:准确识别限速牌上的数字信息,确定限速值。
- 系统优化:提高检测和识别的准确率与速度,确保系统在嵌入式设备上的实时性。
- 数据集构建:构建包含多种场景和光照条件的限速牌数据集,用于模型训练与测试。
3. 研究内容
3.1 数据集构建与预处理
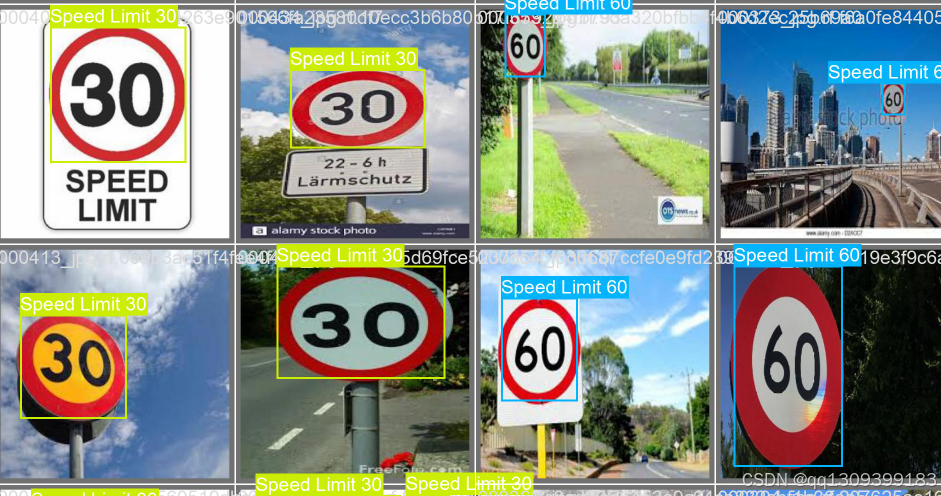
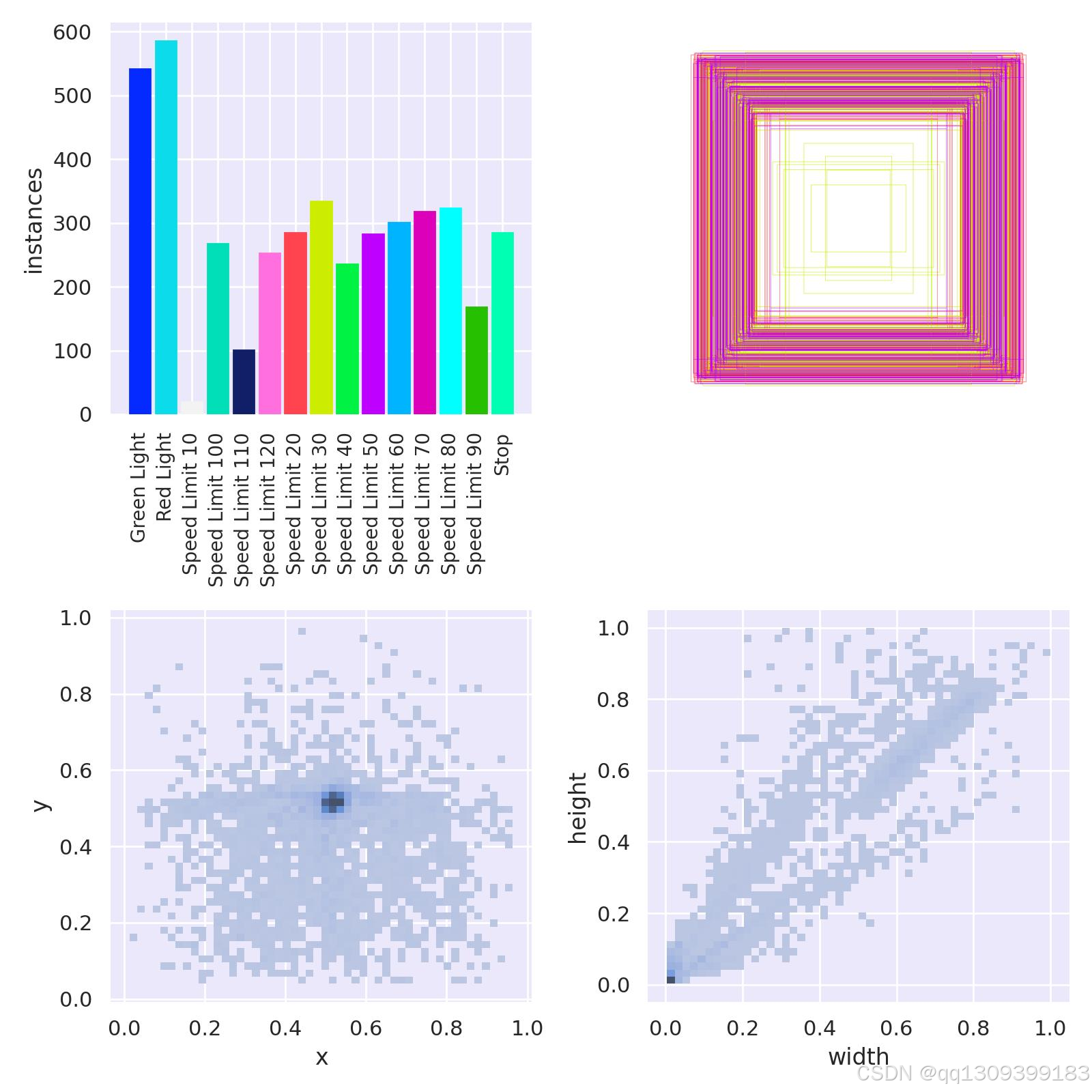
限速牌识别与检测系统的性能依赖于高质量的数据集。本研究将构建一个包含多种场景(如城市道路、高速公路、乡村道路)和光照条件(如白天、夜晚、雨天)的限速牌数据集。数据集的构建包括以下步骤:
- 数据采集:通过车载摄像头或公开数据集(如TT100K、GTSDB)收集限速牌图像。
- 数据标注:使用标注工具(如LabelImg)对限速牌进行标注,生成边界框和类别标签。
- 数据增强:通过旋转、缩放、翻转、添加噪声等方法增强数据集的多样性,提高模型的泛化能力。
3.2 模型选择与训练
YOLOv11作为最新的目标检测算法,具有以下优势:
- 高速度:YOLOv11采用单阶段检测框架,能够在保持高精度的同时实现实时检测。
- 高精度:通过引入新的网络结构和优化策略,YOLOv11在目标检测任务中表现出色。
- 轻量化:YOLOv11支持模型剪枝和量化,适合部署在嵌入式设备上。
本研究将基于YOLOv11构建限速牌检测模型,具体步骤包括:
- 模型选择:选择适合限速牌检测的YOLOv11模型(如YOLOv11s、YOLOv11m)。
- 模型训练:在构建的数据集上训练模型,优化损失函数和超参数。
- 模型评估:使用测试集评估模型的检测精度(如mAP)和速度(如FPS)。

3.3 限速牌识别
在检测到限速牌后,系统需要进一步识别限速牌上的数字信息。本研究将采用以下方法:
- 数字区域提取:通过图像分割技术提取限速牌上的数字区域。
- 数字识别:使用OCR(光学字符识别)技术或深度学习模型(如CRNN)识别数字信息。
- 结果输出:将识别结果与检测结果结合,输出限速值。
3.4 系统实现与优化
本研究将开发一个完整的限速牌识别与检测系统,包括以下模块:
- 图像输入模块:支持从摄像头或视频文件中读取图像。
- 检测与识别模块:基于YOLOv11实现限速牌检测与识别。
- 结果输出模块:在图像上绘制检测框和识别结果,并输出限速值。
- 性能优化:通过模型剪枝、量化和硬件加速(如TensorRT)优化系统性能,确保其在嵌入式设备上的实时性。
4. 研究方法与技术路线
4.1 研究方法
- 文献调研:查阅相关文献,了解限速牌检测与识别的研究现状和技术进展。
- 实验研究:通过实验验证YOLOv11在限速牌检测任务中的性能,优化模型参数和训练策略。
- 系统开发:基于Python和深度学习框架(如PyTorch、TensorFlow)开发限速牌识别与检测系统。
4.2 技术路线
- 数据准备:构建限速牌数据集,进行数据增强和预处理。
- 模型训练:基于YOLOv11训练限速牌检测模型,优化模型性能。
- 系统实现:开发限速牌识别与检测系统,集成检测与识别模块。
- 性能测试:在多种场景下测试系统性能,优化系统速度和精度。
5. 预期成果
- 限速牌数据集:构建一个包含多种场景和光照条件的限速牌数据集。
- 限速牌检测模型:基于YOLOv11训练一个高精度、高速度的限速牌检测模型。
- 限速牌识别系统:开发一个完整的限速牌识别与检测系统,支持实时检测与识别。
- 性能优化方案:提出一套针对嵌入式设备的性能优化方案,确保系统的实时性。
6. 研究计划
- 第一阶段(1-2个月):完成文献调研和数据采集,构建限速牌数据集。
- 第二阶段(3-4个月):基于YOLOv11训练限速牌检测模型,优化模型性能。
- 第三阶段(5-6个月):开发限速牌识别与检测系统,进行性能测试与优化。
- 第四阶段(7-8个月):撰写论文,总结研究成果,准备答辩。
7. 研究意义
本研究将推动限速牌识别与检测技术的发展,为智能交通系统和自动驾驶技术提供技术支持。研究成果可应用于车载辅助驾驶系统、交通监控系统和智能导航系统,提高道路安全性和交通效率。
8. 参考文献
- Redmon, J., & Farhadi, A. (2018). YOLOv3: An Incremental Improvement. arXiv preprint arXiv:1804.02767.
- Bochkovskiy, A., Wang, C. Y., & Liao, H. Y. M. (2020). YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv preprint arXiv:2004.10934.
- Zhu, X., Lyu, S., Wang, X., & Zhao, Q. (2021). YOLOv5: A New State-of-the-Art for Real-Time Object Detection. arXiv preprint arXiv:2104.13478.
- 交通标志检测与识别技术综述. 计算机视觉与图像处理, 2022.
通过本研究,我们期望为限速牌识别与检测领域提供一种高效、准确的解决方案,为智能交通系统的发展贡献力量。


















 472
472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









