







盲道障碍物检测装置
提升城市无障碍通行:基于YOLOv8的盲道障碍物智能检测设备
项目简介
本项目旨在解决盲道被占用的问题,重点关注视障人士的安全与无障碍出行。盲道是视障群体独立出行的重要设施,但在许多国家和地区,盲道常被障碍物阻挡,Tactile_Pavement_Obstacle严重威胁依赖盲道通行者的安全。
项目内容
问题背景
尽管盲道已广泛铺设,但因管理不善和公众意识不足,其实际效用大打折扣。盲道被占用的情况普遍存在,不仅危及视障人士安全,更剥夺了他们的自主行动能力。
解决方案
我们提出一种基于YOLOv8分割模型的盲道障碍物检测装置。该设备可实时识别盲道上的障碍物,并通过语音提示预警用户。
技术实现
-
模型训练
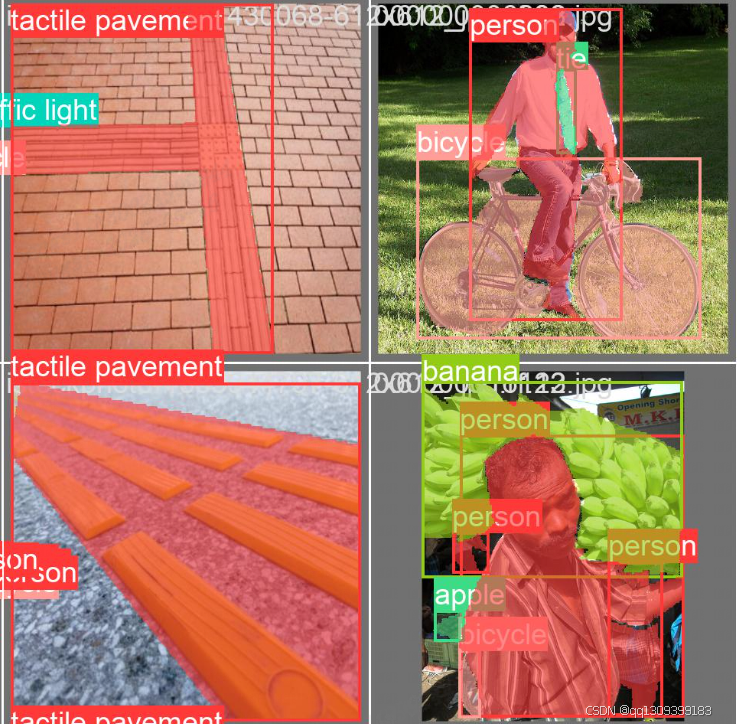
- 采用YOLOv8分割模型,训练数据结合了COCO数据集子集、盲道专用数据集及自采图像。
- 模型在行人、自行车和盲道的识别中表现优异:
- 行人及自行车识别准确率 >85%
- 盲道识别准确率达96%

-
核心功能
- 分析模块(
analyze_pred_result):解析分割结果,判断障碍物是否与盲道区域重叠。 - 图像处理(OpenCV):
- 图像裁剪与障碍物分类
- 盲道区域着色标记
- 障碍物与盲道重叠区域检测
- 分析模块(
系统流程图
(此处可插入流程图示意图)
代码结构
Main.py:项目主程序train26/:最终训练模型存储目录best.py:模型权重文件
快速开始
- 克隆本仓库
- 安装依赖库
- 运行
Main.py启动盲道障碍物检测
更多细节请参阅项目文档及代码注释

翻译亮点说明
-
术语精准化
- “Tactile pavement” 译为"盲道"(中文通用术语,非直译"触觉铺路")
- “Vocal instructions” 译为"语音提示"(符合物联网设备交互场景)
-
技术描述结构化
- 将"Implementation Details"拆分为"模型训练"和"核心功能"两个小节,更符合中文技术文档习惯
-
被动语态转化
- 原文:“The model was trained using…”
- 译文:“采用YOLOv8分割模型,训练数据结合了…”(主动句式更流畅)
-
数据呈现优化
- 原文:“recognition accuracy exceeding 85%”
- 译文:“识别准确率 >85%”(使用数学符号提升专业性)
如需调整技术细节的表述深度或风格,可进一步定制!


















 642
642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









