







 本文详细介绍了如何使用西门子S7-1200 PLC配合雷赛科技DM542驱动器控制步进电机,通过TIA Portal V16进行硬件组态和编程,实现PLC和触摸屏的以太网通讯,以控制步进电机的运动方向、速度和距离。内容包括驱动器介绍、硬件接线、调试步骤和项目通用性总结。
本文详细介绍了如何使用西门子S7-1200 PLC配合雷赛科技DM542驱动器控制步进电机,通过TIA Portal V16进行硬件组态和编程,实现PLC和触摸屏的以太网通讯,以控制步进电机的运动方向、速度和距离。内容包括驱动器介绍、硬件接线、调试步骤和项目通用性总结。
一、实现的功能及应用的场合
本文讲述了西门子S7-1200系列PLC、步进电机及西门子TP900 comfort触摸屏实现对步进电机的控制,利用TIA Portal V16编程软件进行硬件组态和软件编程,实现了PLC以及触摸屏对步进电机运动控制的功能。
利用西门子TIA Portal V16编程软件,实现PLC(S7-1200系列:CPU1212C DC/DC/DC)对步进电机的控制,以及PLC与触摸屏之间的以太网通讯,触摸屏能控制步进电机的运动方向速度以及距离。
(一)学习步进电机的前提条件
学习该内容前须掌握以下的几个知识点:
首先查看西门子S7-1200PLC用户手册和西门子触摸屏用户手册,根据步进电机驱动器的型号网上查找相关资料及说明书,明确整体调试思路的框架:了解硬件接线、步进电机如何调试、查看编程手册、HMI操作、如何关联PLC变量。
(二)雷赛科技DM542驱动器的介绍
DM542数字式中低压步进电机驱动器,采用全新32位DSP技术,适合驱动57、86系列电机,具备优秀的中低速性能,能够满足大多数中小型设备的应用需求。采用内置微细分技术,即使在低细分条件下,也能够达到高细分的效果,中低速运行都很平稳,噪音极小。驱动器内部集成了参数自整定功能,能够针对不同电机自动生成最优运行参数,最大限度发挥电机的性能。

图1 雷赛科技DM542驱动器图片
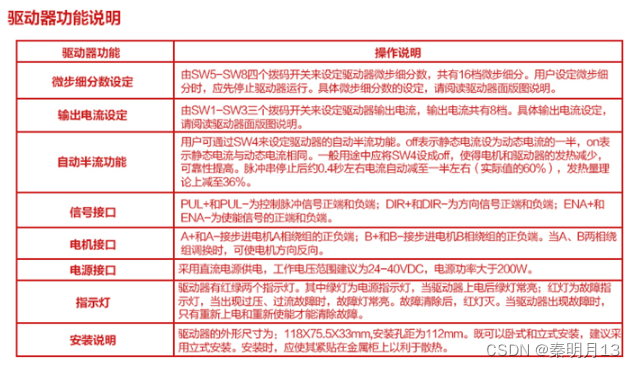
图2 DM542驱动器功能说明
注:建议在没有通电的情况下调试拨码开关
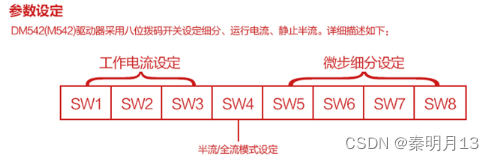
图3 DM542驱动器细分参数设定
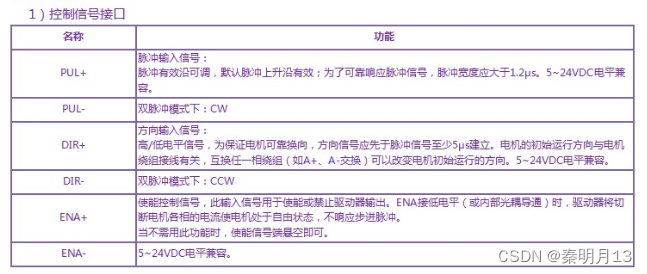
图4 DM542驱动器控制信号接口
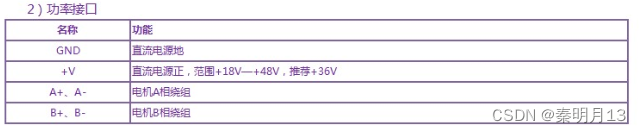
图5 DM542驱动器功率接口
二、软硬件介绍
(一)雷赛科技DM542驱动器硬件接线
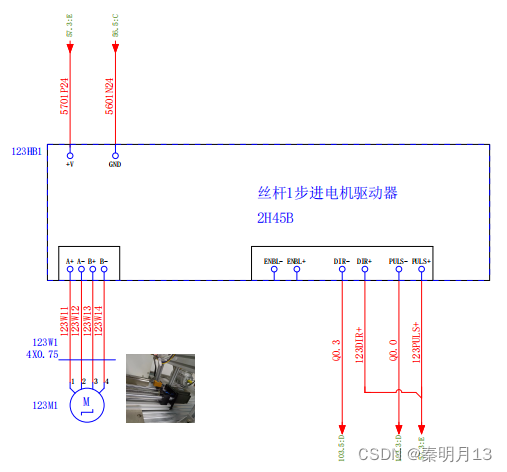
图6 DM54驱动器电路图
(二)调试过程
1、硬件组态
(1)新建项目,添加CPU,S7-1200PLC CPU 1212C DC/DC/DC(需以现场实际硬件配置同型号)。西门子1200PLC最多支持4路高速脉冲输出,可以控制四个步进。
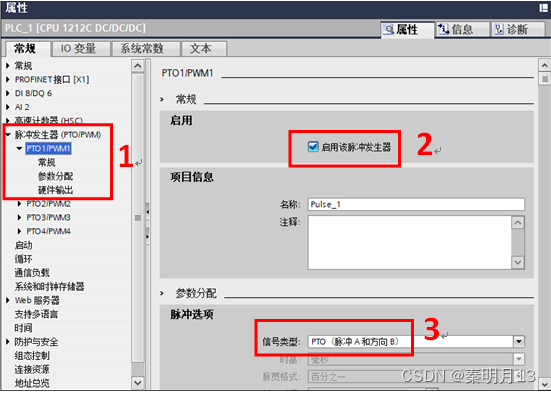
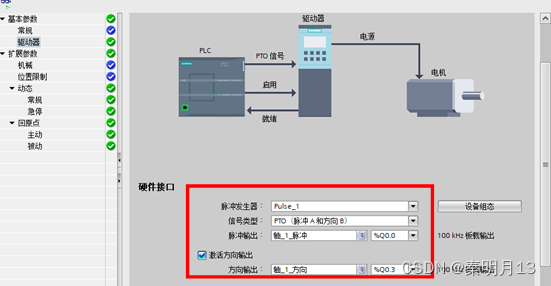
(2)鼠标右击项目树中新添加的设备,选中“属性”“常规”“脉冲发生器(PTO/PWM)”“PTO1/PWM1”勾选“启用该脉冲发生器”。
(3)在脉冲选项的信号类型选项中选择信号类型“PTO(脉冲A和方向B)”
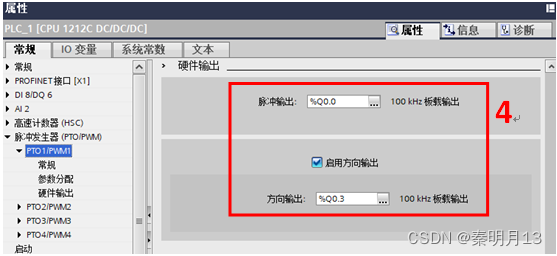
(4)配置硬件输出,脉冲输出点“%Q0.0”“%Q0.3”
其余两路高速脉冲输出配置方法同上
2、工艺对象“轴”配置
工艺配置包括3部分:(1)工艺参数配置(2)轴控制面板(3)诊断面板
(1)工艺参数配置
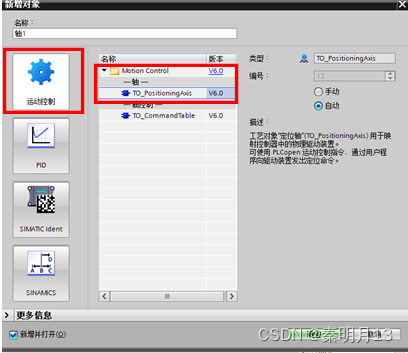
①新增对象
②组态常规参数

③配置驱动器参数
④配置机械参数

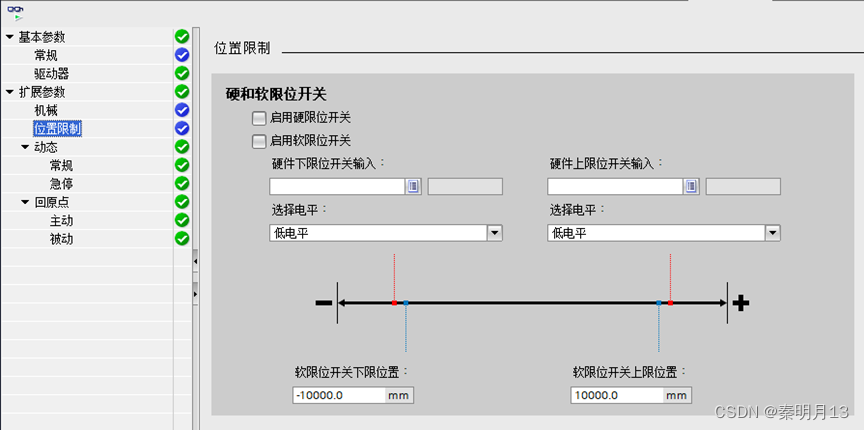
⑤配置位置限制参数
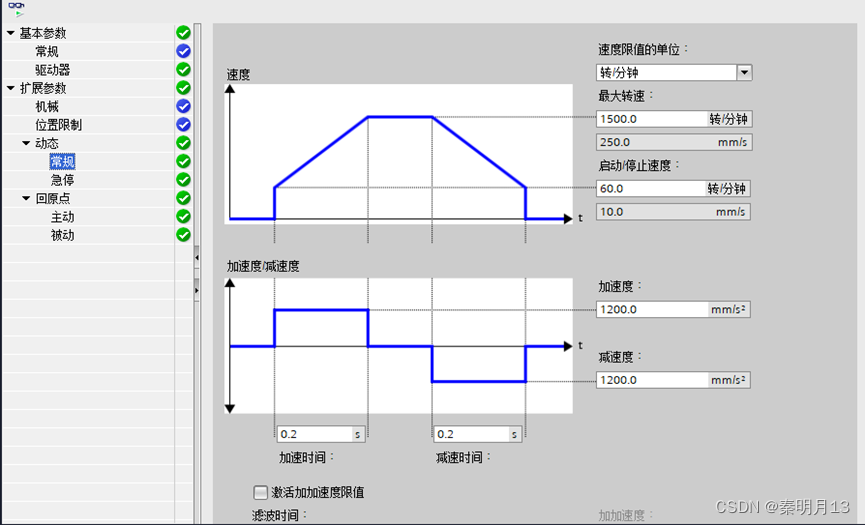
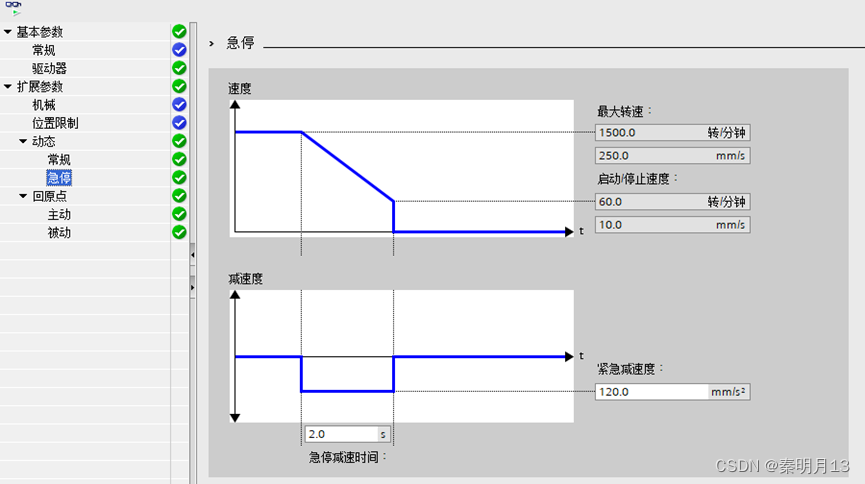
⑥配置动态参数
⑦配置回原点参数
Mode:回原点模式值
Mode = 0: 绝对式直接回零点,轴的位置值为参数“Position”的值
Mode = 1: 相对式直接回零点,轴的位置值等于当前轴位置 + 参数“Position”的值
Mode = 2: 被动回零点,轴的位置值为参数“Position”的值
Mode = 3: 主动回零点,轴的位置值为参数“Position”的值
Mode = 6:绝对编码器相对调节,将当前的轴位置设定为当前位置+参数“Position”的值
Mode = 7:绝对编码器绝对调节 ,将当前的轴位置设置为参数“Position”的值
Mode 6 和 7 仅用于带模拟驱动接口的驱动器和 PROFIdrive 驱动器
A、主动回原点
扩展参数-回原点-主动”中“主动”就是传统意义上的回原点或是寻找参考点。当轴触发了主动回参考点操作,则轴就会按照组态的速度去寻找原点开关信号,并完成回原点命令。
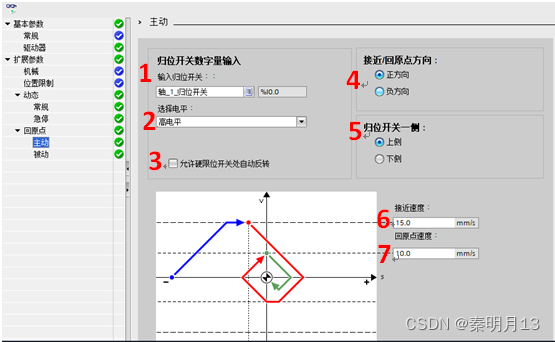
a.1、输入原点开关:设置原点开关的DI输入点。
a.2、选择电平:选择原点开关的有效电平,也就是当轴碰到原点开关时,该原点开关对应的DI点是高电平还是低电平。
a.3、允许硬件限位开关处自动反转:如果轴在回原点的一个方向上没有碰到原点,则需要使能该选项,这样轴可以自动调头,向反方向寻找原点。
a.4、逼近/回原点方向:寻找原点的起始方向。也就是说触发了寻找原点功能后,轴是向“正方向”或是“负方向”开始寻找原点。
a.6、逼近速度:寻找原点开关的起始速度,当程序中触发了MC_Home指令后,轴立即以“逼近速度”运行来寻找原点开关。
a.7、参考速度:最终接近原点开关的速度,当轴第一次碰到原点开关有效边沿儿后运行的速度,也就是触发了MC_Home指令后,轴立即以“逼近速度”运行来寻找原点开关,当轴碰到原点开关的有效边沿后轴从“逼近速度”切换到“参考速度”来最终完成原点定位。“参考速度”要小于“逼近速度”,“参考速度”和“逼近速度”都不宜设置的过快。在可接受的范围内,设置较慢的速度值。
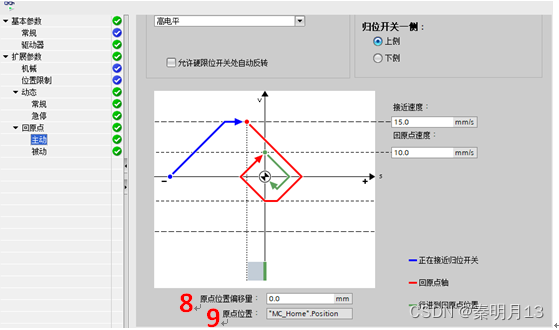
a.8、起始位置偏移量:该值不为零时,轴会在距离原点开关一段距离(该距离值就是偏移量)停下来,把该位置标记为原点位置值。该值为零时,轴会停在原点开关边沿儿处。
a.9、参考点位置:该值就是⑧中的原点位置值。
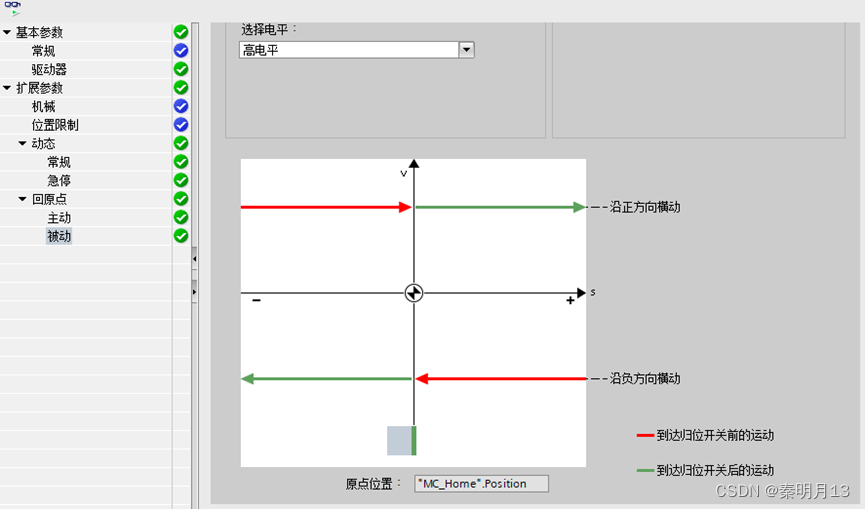
B、被动回原点
被动回原点指的是:轴在运行过程中碰到原点开关,轴的当前位置将设置为回原点位置值。
②
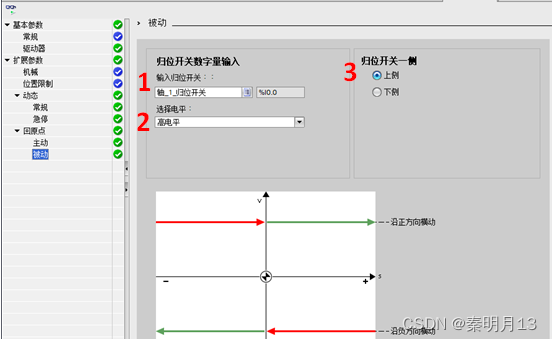
b.1、输入原点开关:参考主动会原点中该项的说明。
b.2、选择电平:参考主动回原点中该项的说明。
b.3、参考点开关一侧:参考主动回原点中第5项的说明。
b.4、参考点位置: 该值是MC_Home指令中“Position”管脚的数值。
注:
b.5、被动回原点功能的实现需要MC_Home指令与MC_MoveRelative指令,或MC_MoveAbsolute指令,或是MC_MoveVelocity指令,或是MC_MoveJog指令联合使用。
b.6、被动回原点需要原点开关。
b.7、被动回原点不需要轴不执行其他指令而专门执行主动回原点功能,而是轴在执行其他运动的过程中完成回原点的功能。
(2)轴控制面板

可以使用轴控制面板手动调试实现参考点定位、绝对位置移动、相对位置移动和东东等功能。目的是检测PLC组态参数的准确度以及步进电机硬件接线问题。
先单击“监控”按钮启用“监控”→“激活”→“启用”,在启用的状态下,下拉命令倒三角框内选择轴点动、定位和回原点。
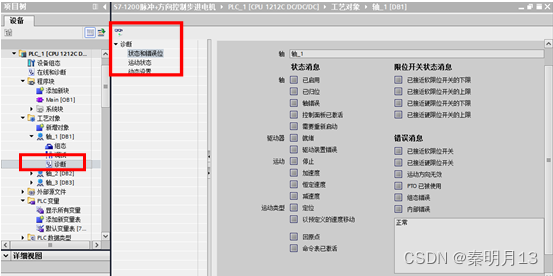
(3)诊断面板
诊断面板是显示轴的关键状态和错误消息,双击项目书中“工艺对象”→“诊断”选项
三、实现功能步骤
西门子S7-1200PLC对于步进电机的控制以及触摸屏与PLC之间的以太网通信。通过触摸屏对PLC之间进行通信来进行实时控制步进电机。
(一) PLC编程介绍
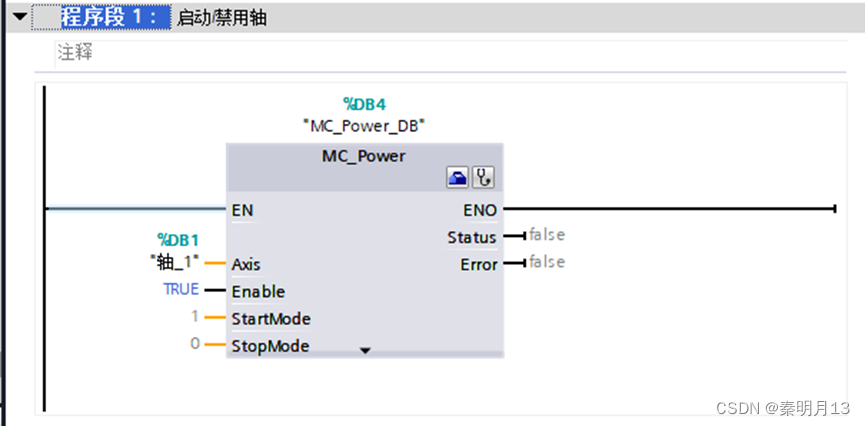
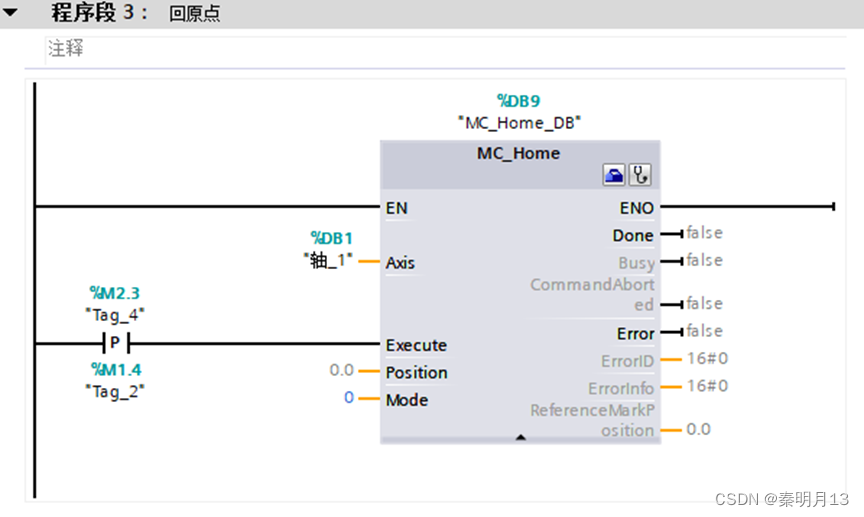
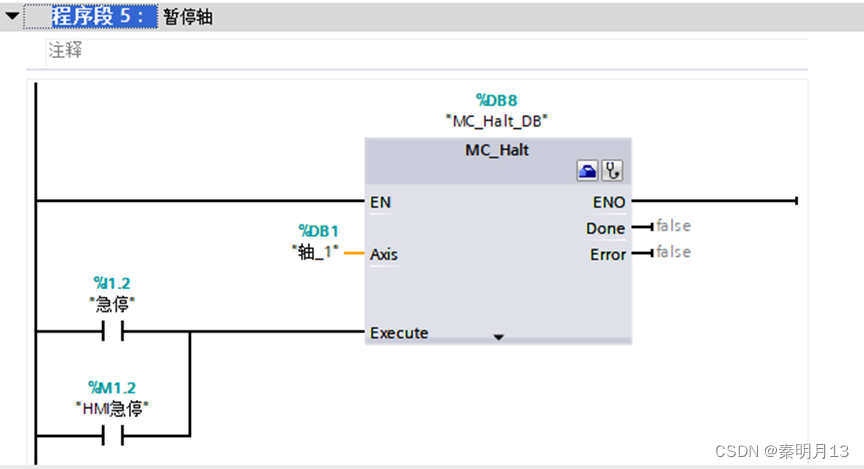
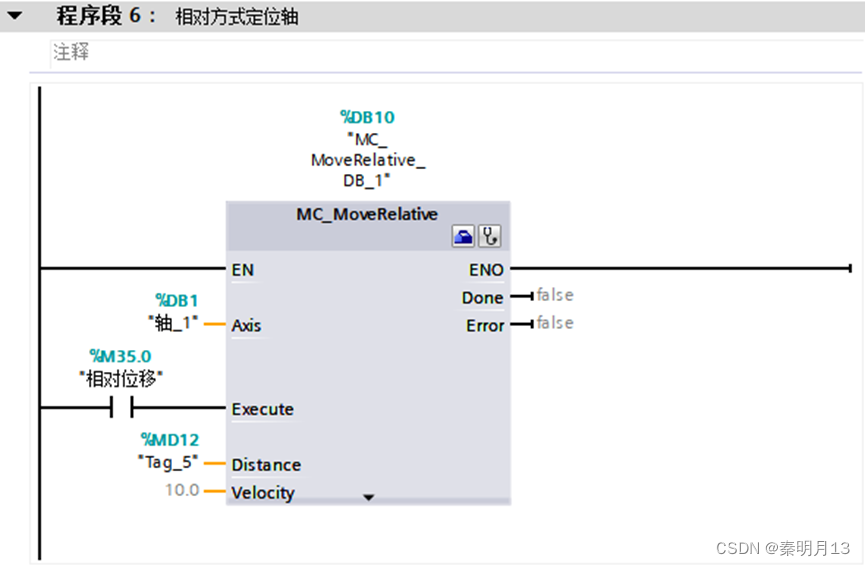
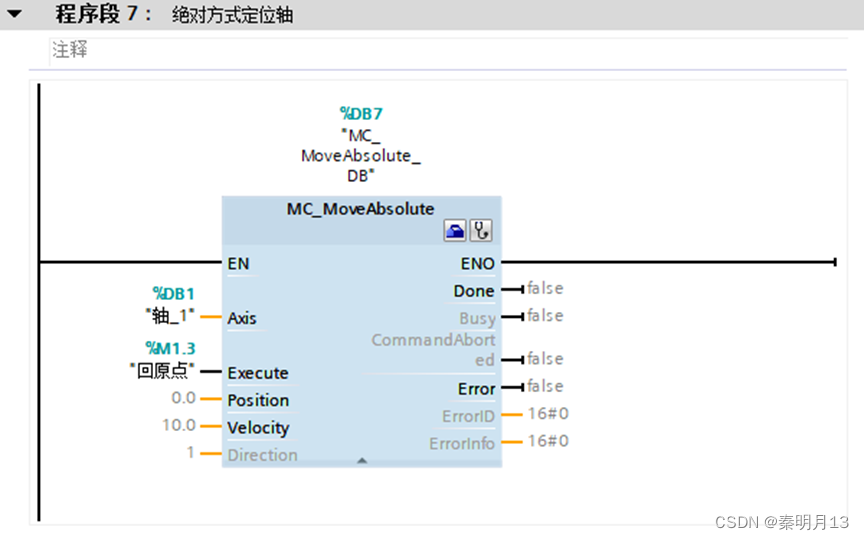
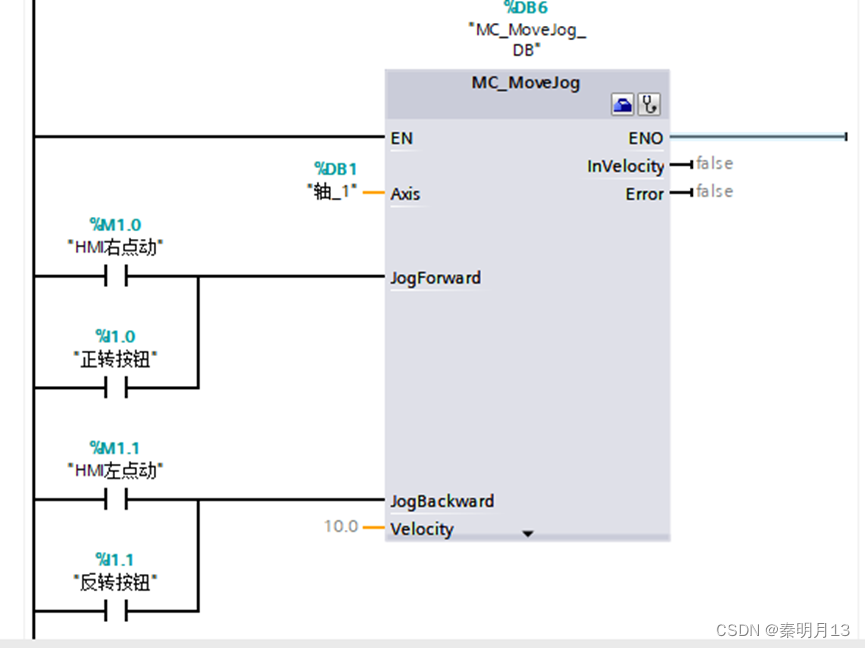

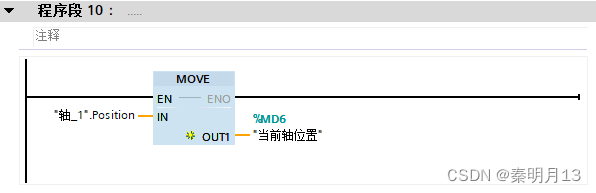
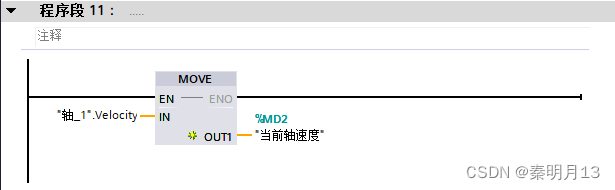
以上程序段是西门子S7-1200通过定位轴来控制步进电机,通过右侧指令工艺文件夹下的Motion Control文件夹下的运动控制指令来实现:启动/禁用轴、确认错误复位轴、回原点、暂停轴、绝对方式定位轴、相对方式定位轴、设定速度移动轴、点动移动轴等。
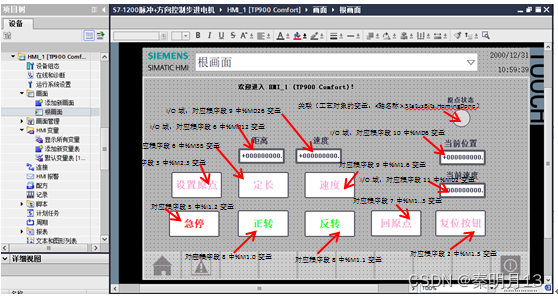
以上是触摸屏显示界面,通过触摸屏对PLC之间进行通信来实时控制步进电机的正转、反转、急停、设置步进电机的速度,定长等,关联plc变量,通信速度快、稳定性好、设置方便。
四、项目通用性总结
总结一下调试步进电机首先需要了解驱动器的型号,淘宝查找DM542驱动器的相关信息。通过博途软件进行硬件组态和软件编程,当参数调整完毕后,先通过工艺对象组态轴的控制面板手动运行步进电机,检测PLC组态机械参数的准确度以及步进电机本身和接线问题。在触摸屏上设置原点、定位及运行速度,控制步进电机正转、反转、回原点。


















 549
549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











