








 超级会员免费看
超级会员免费看

1、确定川崎机器人坐标系
机器人坐标系一般有以下四种:世界坐标(大地坐标)、基坐标、工具坐标、工件坐标。在前面的文章中,我们已经有所阐述,大家可以参考前面文章。
下面川崎以工具坐标系为例(现场川崎机器人是斜方向安装)。

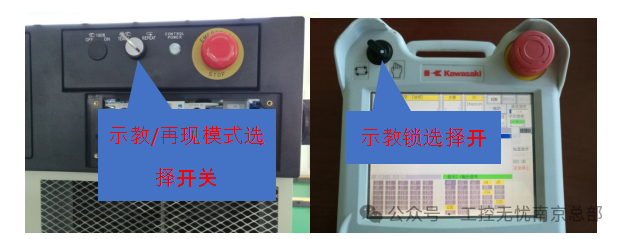
2、选择示教模式
在开机后,将控制柜面板和示教器上的急停按钮释放开,将控制柜面板上的“ TEACH/REPEAT”选择开头置于“TEACH”状态,然后将示教器的示教锁置于“ON”。
3、机械手马达开
按住“A”键和点击屏幕右上角的“MOTOR”或按钮马达开,轻按示教器左手背面的触发器并操持,此时会听到手臂上马达刹车释放的声音,这时可以按下相应的轴按钮移动机器人。

<

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1452
1452











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











