






基于OpenCV完成离散傅里叶变换
目标
学会使用函数:
cv::copyMakeBorder() ,
cv::merge() ,
cv::dft() ,
cv::getOptimalDFTSize() ,
cv::log() 和
cv::normalize() .
源代码如下:
使用的 cv::dft() 的代码示例:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
static void help(char* progName)
{
cout << endl
<< "This program demonstrated the use of the discrete Fourier transform (DFT). " << endl
<< "The dft of an image is taken and it's power spectrum is displayed." << endl
<< "Usage:" << endl
<< progName << " [image_name -- default ../data/lena.jpg] " << endl << endl;
}
int main(int argc, char ** argv)
{
help(argv[0]);
const char* filename = argc >=2 ? argv[1] : "../data/lena.jpg";
Mat I = imread(filename, IMREAD_GRAYSCALE);
if( I.empty())
return -1;
Mat padded; //expand input image to optimal size
int m = getOptimalDFTSize( I.rows );
int n = getOptimalDFTSize( I.cols ); // on the border add zero values
copyMakeBorder(I, padded, 0, m - I.rows, 0, n - I.cols, BORDER_CONSTANT, Scalar::all(0));
Mat planes[] = {Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexI;
merge(planes, 2, complexI); // Add to the expanded another plane with zeros
dft(complexI, complexI); // this way the result may fit in the source matrix
// compute the magnitude and switch to logarithmic scale
// => log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
split(complexI, planes); // planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
Mat magI = planes[0];
magI += Scalar::all(1); // switch to logarithmic scale
log(magI, magI);
// crop the spectrum, if it has an odd number of rows or columns
magI = magI(Rect(0, 0, magI.cols & -2, magI.rows & -2));
// rearrange the quadrants of Fourier image so that the origin is at the image center
int cx = magI.cols/2;
int cy = magI.rows/2;
Mat q0(magI, Rect(0, 0, cx, cy)); // Top-Left - Create a ROI per quadrant
Mat q1(magI, Rect(cx, 0, cx, cy)); // Top-Right
Mat q2(magI, Rect(0, cy, cx, cy)); // Bottom-Left
Mat q3(magI, Rect(cx, cy, cx, cy)); // Bottom-Right
Mat tmp; // swap quadrants (Top-Left with Bottom-Right)
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp); // swap quadrant (Top-Right with Bottom-Left)
q2.copyTo(q1);
tmp.copyTo(q2);
normalize(magI, magI, 0, 1, NORM_MINMAX); // Transform the matrix with float values into a
// viewable image form (float between values 0 and 1).
imshow("Input Image" , I ); // Show the result
imshow("spectrum magnitude", magI);
waitKey();
return 0;
}
解释如下
离散傅里叶变换将会把一副图像分解为其正弦和余弦分量,也就是把一副图像从空间域转换到频率域。主要思想为任何函数都可以近似的精确地用无限的正弦和余弦函数的和表示。在数学上的一个二维图像的傅立叶变换为:
这里, f 是图像在空间域的值, F为频率域的值. 变换的结果为复数.
Displaying this is possible either via a real image and a complex image or via a magnitude and a phase image. However, throughout the image processing algorithms only the magnitude image is interesting as this contains all the information we need about the images geometric structure. Nevertheless, if you intend to make some modifications of the image in these forms and then you need to retransform it you'll need to preserve both of these.
In this sample I'll show how to calculate and show the magnitude image of a Fourier Transform. In case of digital images are discrete. This means they may take up a value from a given domain value. For example in a basic gray scale image values usually are between zero and 255. Therefore the Fourier Transform too needs to be of a discrete type resulting in a Discrete Fourier Transform (DFT). You'll want to use this whenever you need to determine the structure of an image from a geometrical point of view. Here are the steps to follow (in case of a gray scale input imageI):
1 Expand the image to an optimal size. The performance of a DFT is dependent of the image size. It tends to be the fastest for image sizes that are multiple of the numbers two, three and five. Therefore, to achieve maximal performance it is generally a good idea to pad border values to the image to get a size with such traits. Thecv::getOptimalDFTSize() returns this optimal size and we can use the cv::copyMakeBorder() function to expand the borders of an image:
Mat padded; //expand input image to optimal size
int m = getOptimalDFTSize( I.rows );
int n = getOptimalDFTSize( I.cols ); // on the border add zero pixels
copyMakeBorder(I, padded, 0, m - I.rows, 0, n - I.cols, BORDER_CONSTANT, Scalar::all(0));
2 Make place for both the complex and the real values. 傅里叶变换的结果为复数。这意味着对于图像的每一个像素值变换的结果位两个值(一个对应复数的实部一个对应虚部). 另外,频率阈值的范围相对空间阈是非常大的. 所以,数据的存储至少要用实数类型. 所以将会把输入图像转换为用实数表示 并扩展一个通道来保存复数:
Mat planes[] = {Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexI;
merge(planes, 2, complexI); // Add to the expanded another plane with zeros
3 进行离散傅里叶.计算中用输入存储输出结果
dft(complexI, complexI); // this way the result may fit in the source matrix
4 转换虚部(complex)和实部(real)的值为级数(magnitude). 一个复数有一个real ( Re)(实部)和一个 complex (imaginary - Im) 虚部. DFT变换的结果为一组复数.DFT变换的级数为:
M=Re(DFT(I))2+Im(DFT(I))2‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾√2
OpenCV 代码如下:
split(complexI, planes); // planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
Mat magI = planes[0];
5 Switch to a logarithmic scale. It turns out that the dynamic range of the Fourier coefficients is too large to be displayed on the screen. We have some small and some high changing values that we can't observe like this. Therefore the high values will all turn out as white points, while the small ones as black. To use the gray scale values to for visualization we can transform our linear scale to a logarithmic one: M1=log(1+M)
用 OpenCV 形式的代码实现为:
magI += Scalar::all(1); // switch to logarithmic scale
log(magI, magI);6 Crop and rearrange. Remember, that at the first step, we expanded the image? Well, it's time to throw away the newly introduced values. For visualization purposes we may also rearrange the quadrants of the result, so that the origin (zero, zero) corresponds with the image center.
magI = magI(Rect(0, 0, magI.cols & -2, magI.rows & -2));
int cx = magI.cols/2;
int cy = magI.rows/2;
Mat q0(magI, Rect(0, 0, cx, cy)); // Top-Left - Create a ROI per quadrant
Mat q1(magI, Rect(cx, 0, cx, cy)); // Top-Right
Mat q2(magI, Rect(0, cy, cx, cy)); // Bottom-Left
Mat q3(magI, Rect(cx, cy, cx, cy)); // Bottom-Right
Mat tmp; // swap quadrants (Top-Left with Bottom-Right)
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp); // swap quadrant (Top-Right with Bottom-Left)
q2.copyTo(q1);
tmp.copyTo(q2);
7 归一化. 目的是为了可视化. 现在已经有了一个级数图像,但是数据的范围超出了0到1的范围.进行归一化使用的函数为 cv::normalize().
normalize(magI, magI, 0, 1, NORM_MINMAX); // Transform the matrix with float values into a
// viewable image form (float between values 0 and 1).
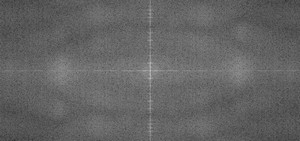
结果(使用DFT检测文本的方向)
一个应用是在图像中存在的几何方向。例如,判断文字的方向是否是横向的?Looking at some text you'll notice that the text lines sort of form also horizontal lines and the letters form sort of vertical lines. These two main components of a text snippet may be also seen in case of the Fourier transform。 Let us usethis horizontal andthis rotated image about a text.
In case of the horizontal text(文字行在水平方向上排成一行):
In case of a rotated text(文字行被旋转了的情况):
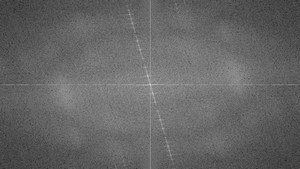
You can see that the most influential components of the frequency domain (brightest dots on the magnitude image) follow the geometric rotation of objects on the image. From this we may calculate the offset and perform an image rotation to correct eventual miss alignments.lisanful















 180
180

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









