







本文由董碧成,石春,吴刚联合创作
摘要
随着人们对于汽车安全性和舒适性要求的日益提高,汽车电子技术不断发展,日益复杂的汽车功能需求使得汽车 ECU 软件代码量急剧增加。软件与硬件之间的高度耦合使得开发工作大量重复且复用性低,极大增加了企业研发和维护成本。以 AU-TOSAR 架构为基础,进行以电动汽车中央控制单元为硬件平台的 CAN 通信模块软件开发,提升软件的复用性和开发效率,降低软件更新和硬件升级的研发成本。
引言
随着汽车电子技术的发展,其应用取代了大部分传统的机械部件,逐步深入到汽车的各个角落,成为驱动汽车执行动作的核心。日益复杂的功能需求,使得 汽车 ECU ( Electronic Control Unit) 数量逐渐增加。ECU 的软件代码量也随着功能的增加日趋庞大,软件维护和管理工作繁重。与此同时,每当硬件升级或更换硬件平台时,软件需要进行大量地修改甚至重新设 计,使得软件开发周期延长,开发成本大大提高。
在此背景下,全球最大规模的几家汽车企业、零部件供应商以及电子、半导体、软件系统公司,于 2003 年联合成立了一个汽车开放系统架构联盟———AUTO- SAR( AUTomotive Open Source ARchitecture) 联盟,并
推出了一个开放化、标准化的汽车嵌入式系统软件架构———AUTOSAR 规范。其主要目标涵盖了软件升级更新、开发可重用软件、加快软件开发维护以及优化可扩展系统成本等多个方面,较好地解决了 ECU 软件开发过程中的突出问题。
1 AUTOSAR介绍
AUTOSAR 采用模块化的分层软件设计,从软件架构视图角度可分为应用层、运行时环境和基础软件层, 如图 1 所示。应用层由软件组件单元构成,包含与硬件无关的应用软件组件、传感器软件组件和执行器软件组 件等。运行时环境为系统提供基础的通信服务,支持应 用层软件组件之间的通信,以及应用层软件组件到下层 基础软件层之间的通信,运行时环境将应用层软件与下层基础软件层分割开来。基础软件层主要提供基础软件服务、标准化系统功能和应用接口,由服务层、ECU 抽象层、微控制器抽象层和复杂驱动组成。
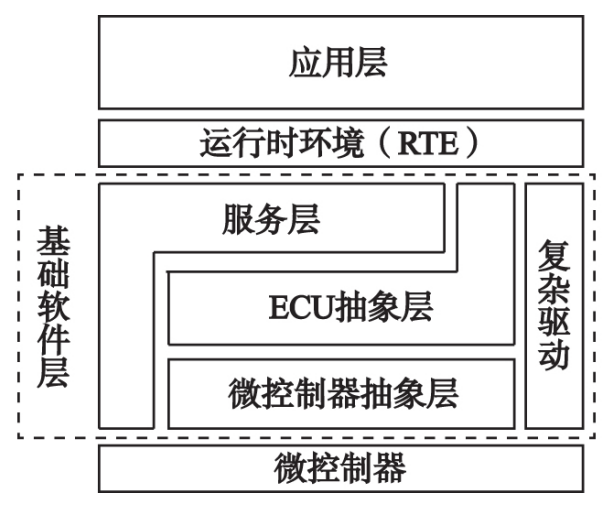
图 1 AUTOSAR 分层软件架构
AUTOSAR 架构通过将硬件层进行抽象,得到微控制器抽象层,隐藏了硬件接口细节,达到将硬件与上层软件分离的效果,实现水平层解耦。当 ECU 硬件平台进行更新换代时,只需要将微控制器抽象层接口函数进行修改,上层代码可以实现复用,大大减少了开发时间和成本,提升了软件的复用性。
2 CAN通信模块设计分析
2.1 CAN 通信模块软件架构
CAN 通信模块包括了 AUTOSAR COM、PDU Rout- er、CAN Interface 和CAN Driver 几个模块。根据AUTO- SAR 分层设计思想和 AUTOSAR 规范对 CAN 通信模块设计的要求,设计出如图 2 所示的软件框架。OSEK OS 是个静态的实时操作系统,主要为应用层软件提供服 务,在 CAN 通信中为需要周期执行的函数提供服务。OSEK OS 位于系统服务层,操作系统需要直接操作下层硬件,贯穿了 ECU 抽象层和微控制器抽象层。
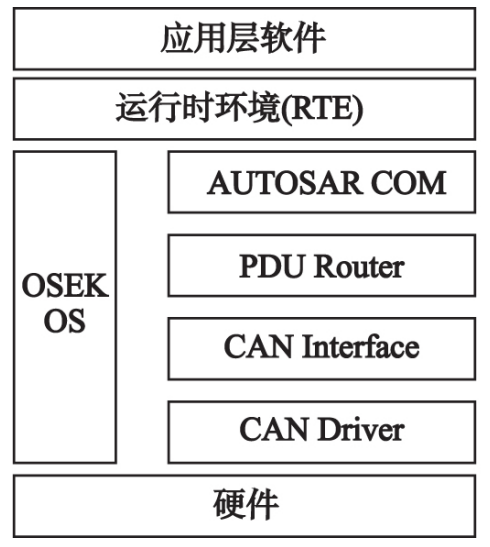
图 2 CAN 通信软件框架
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 118
118











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









