






2.3 光敏电阻光照传感器
光敏电阻是用硫化隔或硒化隔等半导体材料制成的特殊电阻器,其工作原理是基于内光电效应。随着光照强度的升高,电阻值迅速降低,由于光照产生的载流子都参与导电,在外加电场的作用下作漂移运动,电子奔向电源的正极,空穴奔向电源的负极,从而使光敏电阻器的阻值迅速下降。其在无光照时,几乎呈高阻状态,暗时电阻很大。光敏电阻模块一般用来检测周围环境的光线的亮度,触发单片机或继电器模块等。
2.3.1 模块来源
采购链接:光敏电阻传感器模块 光感应 智能车配件
资料下载链接:
https://pan.baidu.com/s/1VMFN1fVo5jxB80IYTsY67A
资料提取码:y8jw
2.3.2 规格参数
工作电压:3.3-5V
工作电流:1MA
模块尺寸:31.1475 x 14.097mm
输出方式: DO接口为数字量输出 AO接口为模拟量输出
读取方式:ADC
管脚数量:4 Pin(2.54mm间距排针)
2.3.3 移植过程
我们的目标是在梁山派GD32F470上能够判断当前光照强度的功能。首先要获取资料,查看数据手册应如何实现,再移植至我们的工程。
2.3.3.1 查看资料
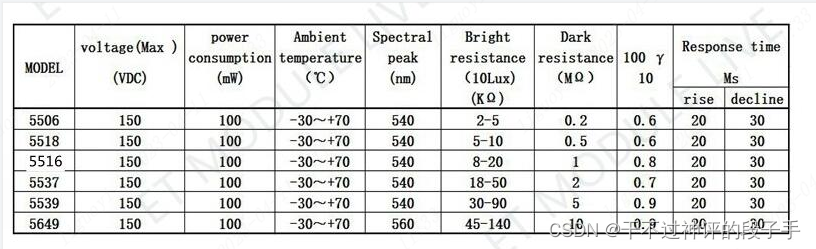
这个模块采用的光敏电阻的型号是5516,对应下图,可以知道在光亮时的阻值在8到20KΩ左右,在光暗时的阻值在1MΩ左右。
其对应的原理图见图2.2.3.1-2,其中U2.1为LM393,R3为光敏电阻。AO输出为R2和R3分压后直接输出电压,所以为模拟量;DO为经过LM393进行电压比较后,输出高低电平,所以为数字量。具体原理是,393的3号引脚电压与2号引脚进行电压比较。当3号引脚电压比2号引脚电压高时,1号引脚输出高电平;当3号引脚电压比2号引脚电压低时,1号引脚输出低电平;可以通过调整R4控制2号引脚的电压。
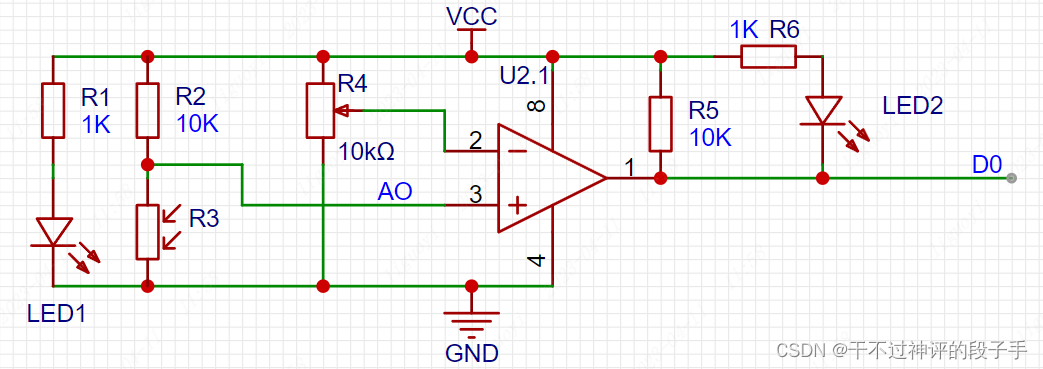
因此DO引脚可以配置为GPIO的输入模式,AO引脚需要配置为ADC模拟输入模式。
2.3.3.2 引脚选择
想要使用ADC,需要确定使用的引脚是否有ADC外设功能。可以通过数据手册
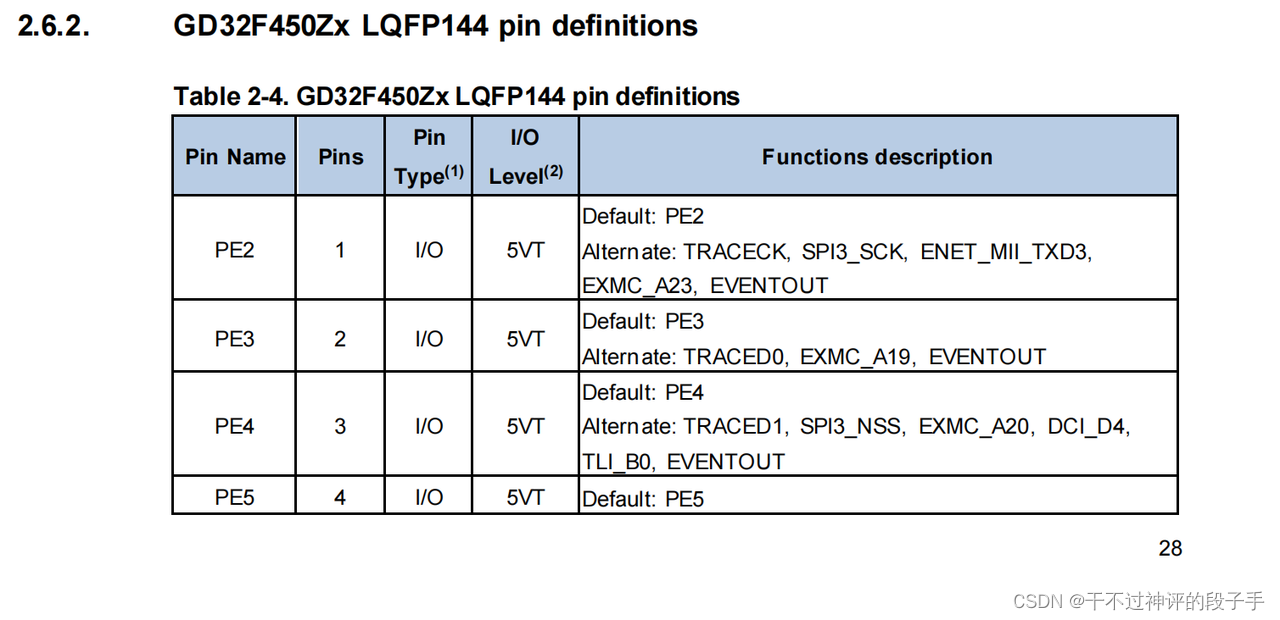
在数据手册的第28页结尾,是关于GD32F450Zx系列芯片引脚的功能定义示意图。
当前只有AO引脚需要使用到ADC接口,所以DO引脚可以使用开发板上其他的GPIO。这里选择使用PC1的附加ADC功能。使用ADC0的第11道输入通道。

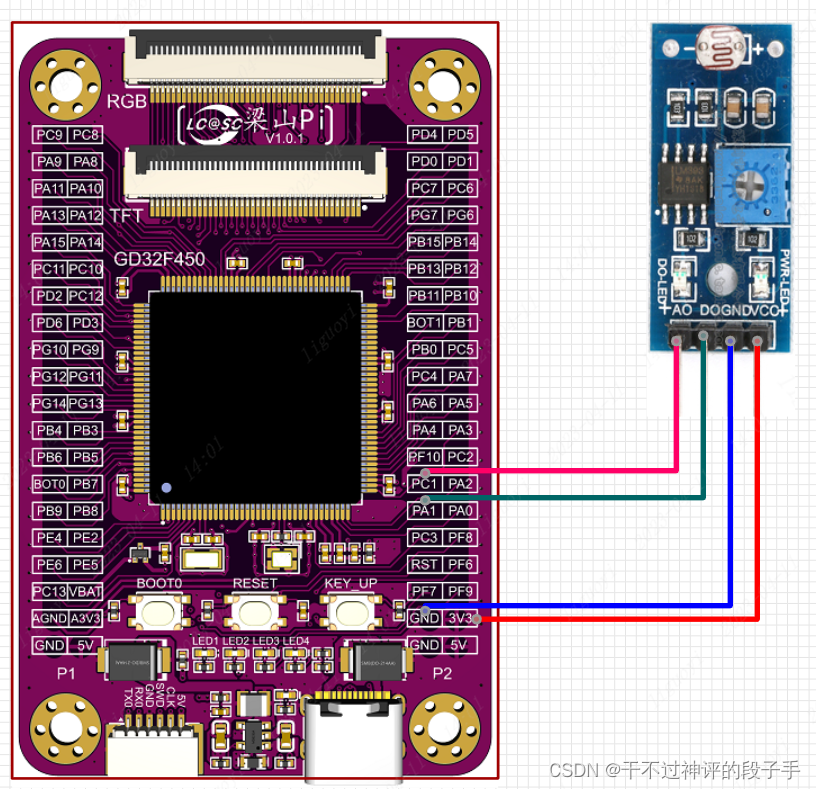
| 光照传感器 | 立创·梁山派 |
|---|---|
| VCC | 3V3 |
| GND | GND |
| DO | PA1 |
| AO | PC1 |
2.3.3.3 移植至工程
移植步骤中的导入.c和.h文件与上一节相同,只是将.c和.h文件更改为bsp_illume.c与bsp_illume.h。见2.2.3.3 移植至工程。这里不再过多讲述。移植完成后面修改相关代码。
在文件bsp_illume.c中,编写如下代码。
/********************************************************************************
* 文 件 名: bsp_illume.c
* 版 本 号: 初版
* 修改作者: LC
* 修改日期: 2023年04月06日
* 功能介绍:
******************************************************************************
* 注意事项:
*********************************************************************************/
#include "bsp_illume.h"
#include "systick.h"
//DMA缓冲区
uint16_t gt_adc_val[ SAMPLES ][ CHANNEL_NUM ];
/******************************************************************
* 函 数 名 称:Illume_GPIO_Init
* 函 数 说 明:初始化光敏电阻光照传感器引脚功能
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void Illume_GPIO_Init(void)
{
/* DMA初始化功能结构体定义 */
dma_single_data_parameter_struct dma_single_data_parameter;
/* 使能引脚时钟 */
rcu_periph_clock_enable(RCU_ILLUME_GPIO_AO);
rcu_periph_clock_enable(RCU_ILLUME_GPIO_DO);
/* 使能ADC时钟 */
rcu_periph_clock_enable(RCU_ILLUME_ADC);
/* 使能DMA时钟 */
rcu_periph_clock_enable(RCU_ILLUME_DMA);
/* 配置ADC时钟 */
adc_clock_config(ADC_ADCCK_PCLK2_DIV4);
/* 配置PA1(DO)为输入模式 */
gpio_mode_set(PORT_ILLUME_DO, GPIO_MODE_INPUT, GPIO_PUPD_NONE, GPIO_ILLUME_DO);
/* 配置PC1(AO)为浮空模拟输入模式 */
gpio_mode_set(PORT_ILLUME_AO, GPIO_MODE_ANALOG, GPIO_PUPD_NONE, GPIO_ILLUME_AO);
/* 配置ADC为独立模式 */
adc_sync_mode_config(ADC_SYNC_MODE_INDEPENDENT);
/* 使能连续转换模式 */
adc_special_function_config(PORT_ADC, ADC_CONTINUOUS_MODE, ENABLE);
/* 使能扫描模式 */
adc_special_function_config(PORT_ADC, ADC_SCAN_MODE, ENABLE);
/* 数据右对齐 */
adc_data_alignment_config(PORT_ADC, ADC_DATAALIGN_RIGHT);
/* ADC0设置为规则组 一共使用 CHANNEL_NUM 个通道 */
adc_channel_length_config(PORT_ADC, ADC_REGULAR_CHANNEL, CHANNEL_NUM);
/* ADC规则通道配置:ADC0的通道11的扫描顺序为0;采样时间:15个周期 */
/* DMA开启之后 gt_adc_val[x][0] = PC1的数据 */
adc_regular_channel_config(PORT_ADC, 0, CHANNEL_ADC, ADC_SAMPLETIME_15);//PC1
/* ADC0设置为12位分辨率 */
adc_resolution_config(PORT_ADC, ADC_RESOLUTION_12B);
/* ADC外部触发禁用, 即只能使用软件触发 */
adc_external_trigger_config(PORT_ADC, ADC_REGULAR_CHANNEL, EXTERNAL_TRIGGER_DISABLE);
/* 使能规则组通道每转换完成一个就发送一次DMA请求 */
adc_dma_request_after_last_enable(PORT_ADC);
/* 使能DMA请求 */
adc_dma_mode_enable(PORT_ADC);
/* 使能DMA */
adc_enable(PORT_ADC);
/* 等待ADC稳定 */
delay_1ms(1);
/* 开启ADC自校准 */
adc_calibration_enable(PORT_ADC);
/* 清除 DMA通道0 之前配置 */
dma_deinit(PORT_DMA, CHANNEL_DMA);
/* DMA初始化配置 */
dma_single_data_parameter.periph_addr = (uint32_t)(&ADC_RDATA(PORT_ADC)); //设置DMA传输的外设地址为ADC0基地址
dma_single_data_parameter.periph_inc = DMA_PERIPH_INCREASE_DISABLE; //关闭外设地址自增
dma_single_data_parameter.memory0_addr = (uint32_t)(gt_adc_val); //设置DMA传输的内存地址为 gt_adc_val数组
dma_single_data_parameter.memory_inc = DMA_MEMORY_INCREASE_ENABLE; //开启内存地址自增(因为不止一个通道)
dma_single_data_parameter.periph_memory_width = DMA_PERIPH_WIDTH_16BIT; //传输的数据位 为 16位
dma_single_data_parameter.direction = DMA_PERIPH_TO_MEMORY; //DMA传输方向为 外设往内存
dma_single_data_parameter.number = SAMPLES * CHANNEL_NUM; //传输的数据长度为:每个通道采集30次 * 1个通道
dma_single_data_parameter.priority = DMA_PRIORITY_HIGH; //设置高优先级
dma_single_data_mode_init(PORT_DMA, CHANNEL_DMA, &dma_single_data_parameter);//将配置保存至DMA1的通道0
/* DMA通道外设选择 */
/* 数据手册的195页根据PERIEN[2:0]值确定第三个参数,例是100 则为DMA_SUBPERI4 例是010 则为DMA_SUBPERI2 */
/* 我们是ADC0功能,PERIEN[2:0]值为000,故为DMA_SUBPERI0 */
dma_channel_subperipheral_select(PORT_DMA, CHANNEL_DMA, DMA_SUBPERI0);
/* 使能DMA1通道0循环模式 */
dma_circulation_enable(PORT_DMA, CHANNEL_DMA);
/* 启动DMA1的通道0功能 */
dma_channel_enable(PORT_DMA, CHANNEL_DMA);
/* 开启软件触发ADC转换 */
adc_software_trigger_enable(PORT_ADC, ADC_REGULAR_CHANNEL);
}
/******************************************************************
* 函 数 名 称:Get_Adc_Dma_Value
* 函 数 说 明:对DMA保存的数据进行平均值计算后输出
* 函 数 形 参:CHx 第几个扫描的数据
* 函 数 返 回:对应扫描的ADC值
* 作 者:LC
* 备 注:返回值最低0 最高4095
******************************************************************/
unsigned int Get_Adc_Dma_Value(char CHx)
{
unsigned char i = 0;
unsigned int AdcValue = 0;
/* 因为采集 SAMPLES 次,故循环 SAMPLES 次 */
for(i=0; i< SAMPLES; i++)
{
/* 累加 */
AdcValue+=gt_adc_val[i][CHx];
}
/* 求平均值 */
AdcValue=AdcValue / SAMPLES;
return AdcValue;
}
/******************************************************************
* 函 数 名 称:Get_illume_Percentage_value
* 函 数 说 明:读取光敏电阻值,并且返回百分比
* 函 数 形 参:无
* 函 数 返 回:返回百分比
* 作 者:LC
* 备 注:最亮100 最暗0
******************************************************************/
unsigned int Get_illume_Percentage_value(void)
{
//GD32F470和GD32F450的ADC精度都是12位
//2的12次方 = 4096
//因为单片机是从0开始算,所以要4096-1=4095
int adc_max = 4095;
int adc_new = 0;
int Percentage_value = 0;
adc_new = Get_Adc_Dma_Value(0);
//百分比 = ( 当前值 / 最大值 )* 100
Percentage_value = ( 1 - ( (float)adc_new / adc_max ) ) * 100;
return Percentage_value;
}
/******************************************************************
* 函 数 名 称:Get_DO_In
* 函 数 说 明:读取DO引脚的电平状态
* 函 数 形 参:无
* 函 数 返 回:1=检测过亮 0=检测过暗
* 作 者:LC
* 备 注:无
******************************************************************/
char Get_DO_In(void)
{
if( GET_DO_IN == 1 )
{
return 1;
}
return 0;
}
在文件bsp_encoder.h中,编写如下代码。
#ifndef _BSP_MQ2_H_
#define _BSP_MQ2_H_
#include "gd32f4xx.h"
#define RCU_ILLUME_GPIO_AO RCU_GPIOC
#define RCU_ILLUME_GPIO_DO RCU_GPIOA
#define RCU_ILLUME_ADC RCU_ADC0
#define RCU_ILLUME_DMA RCU_DMA1
#define PORT_DMA DMA1
#define CHANNEL_DMA DMA_CH0
#define PORT_ADC ADC0
#define CHANNEL_ADC ADC_CHANNEL_11
#define PORT_ILLUME_AO GPIOC
#define GPIO_ILLUME_AO GPIO_PIN_1
#define PORT_ILLUME_DO GPIOA
#define GPIO_ILLUME_DO GPIO_PIN_1
#define GET_DO_IN gpio_input_bit_get(PORT_ILLUME_DO, GPIO_ILLUME_DO)
//采样次数
#define SAMPLES 30
//采样通道数
#define CHANNEL_NUM 1
extern uint16_t gt_adc_val[ SAMPLES ][ CHANNEL_NUM ]; //DMA缓冲区
void Illume_GPIO_Init(void);
unsigned int Get_Adc_Dma_Value(char CHx);
unsigned int Get_illume_Percentage_value(void);
char Get_DO_In(void);
#endif
2.3.4 移植验证
在自己工程中的main主函数中,编写如下。
/********************************************************************************
* 文 件 名: main.c
* 版 本 号: 初版
* 修改作者: LC
* 修改日期: 2023年04月06日
* 功能介绍:
******************************************************************************
* 注意事项:
*********************************************************************************/
#include "gd32f4xx.h"
#include "systick.h"
#include "bsp_usart.h"
#include "bsp_illume.h"
#include "stdio.h"
int main(void)
{
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2); // 优先级分组
systick_config(); //滴答定时器初始化 1ms
usart_gpio_config(115200U);
Illume_GPIO_Init();
printf("ADC+DMA demo start\r\n");
while(1)
{
printf("ADC-%d\r\n", Get_Adc_Dma_Value(0) );
printf("illume-%d%%\r\n", Get_illume_Percentage_value() );
delay_1ms(1000);
}
}
移植现象:输出ADC值和换算后的光照度百分比。
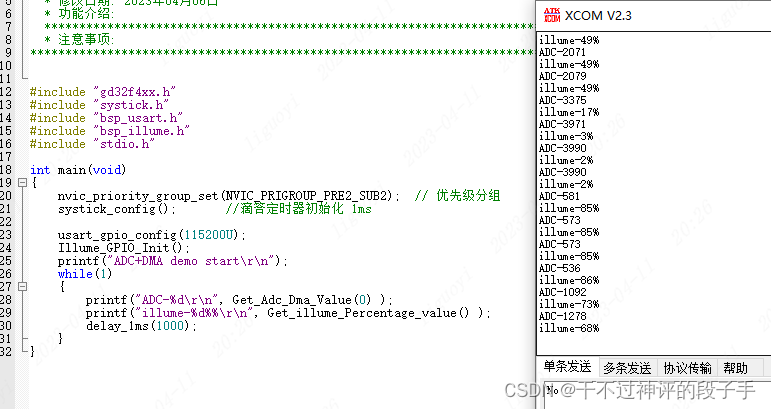
移植成功示例,见文件2.3.4-1 。
文件2.3.4-1
















 6654
6654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









