






在激光测距中涉及到三角法测距,但三角法测距的原理是什么呢?
红外发射器按照一定的角度发射红外光束,光束遇到被测物体后将会反射回来,反射回来的光线被CCD检测器检测,其获取一个偏移L。由图示以及已知的各值可以求出激光器到物体的距离d。
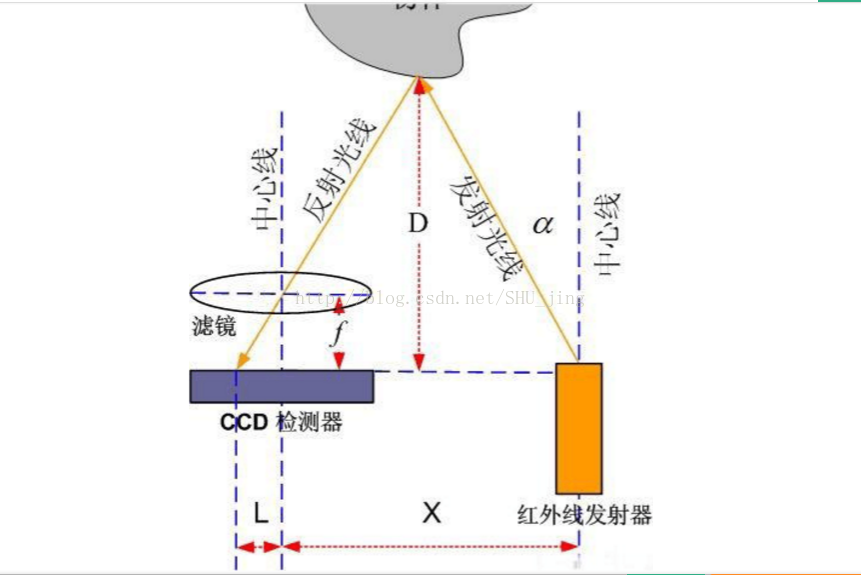
- 在测量时可知发射角度∝以及偏移量L,中心矩X和滤镜的焦距f也已知利用三角几何关系可以求出。大致计算过程如下:在CCD检测器与滤镜间的三角形中因为已知L和f所以可以可以求出发射光线与CCD检测器的夹角;在由发射光线、发射光线以及中心矩构成的三角形中已知两角一边,所以可以求出另外两边即发射光线和发射光线边的长度;再在该三角形中的任一直角三角形中因为已知一角一边,利用正弦定理可以求出D,即所需的距离。
- 【注】随着被测物体的距离改变偏移量L也会发生改变,两者成反比。当距离很近时,偏移量L很大可能会超出CCD检测器范围,无法测量;当距离很远,偏移量L很小要求CCD检测器灵敏度较高。















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









