







概述
S M O SMO SMO 是由 P l a t t Platt Platt 在 1998 年提出的、针对软间隔最大化 S V M SVM SVM 对偶问题求解的一个算法,其基本思想很简单:如果所有变量的解都满足此优化问题的 KKT 条件,则这个优化问题的解就得到了;否则在每一步优化中,挑选出诸多参数 α k ( k = 1 , 2 , ⋯ , n ) \alpha_k\ (k=1,2,\cdots,n) αk (k=1,2,⋯,n) 中的两个参数 α i , α j \alpha_i,\alpha_j αi,αj 作为变量,其余参数都视为常数,问题就变成了类似于二次方程求最大值的问题,从而我们就能求出解析解,这两个变量中,一个是违反 KKT 条件最严重的那一个,另一个由约束条件自动确定一个。
选择变量的启发式方法
先来回顾一下 S V M SVM SVM 中的优化目标函数:
min α i ≥ 0 ( 1 2 ∑ i = 1 N ∑ j = 1 N α i α j y i y j K ( x ⃗ i , x ⃗ j ) − ∑ i = 1 N α i ) s . t . ∑ i = 1 N α i y i = 0 , 0 ≤ α i ≤ C \min\limits_{\alpha_i\ge0}\left(\frac{1}{2}\sum\limits_{i=1}^N\sum\limits_{j=1}^N\alpha_i\alpha_jy_iy_jK(\vec x_i,\vec x_j)-\sum\limits_{i=1}^N\alpha_i\right)\\s.t. \sum\limits_{i=1}^N\alpha_iy_i=0,\ \ 0\le\alpha_i\le C αi≥0min(21i=1∑Nj=1∑NαiαjyiyjK(xi,xj)−i=1∑Nαi)s.t.i=1∑Nαiyi=0, 0≤αi≤C
由于要满足约束 ∑ i = 1 N α i y i = 0 \sum\limits_{i=1}^N\alpha_iy_i=0 i=1∑Nαiyi=0,所以每次需要选取两个 α i \alpha_i αi 做为变量,这一点与坐标上升法不同。
要使优化目标函数有解,我们需要使其满足 K K T KKT KKT 条件中的互补松弛:
α i ( y i ( w ⃗ ⋅ ϕ ( x ⃗ i ) + b ) − 1 + ξ i ) = 0 \alpha_i(y_i(\vec w\cdot\phi(\vec x_i)+b)-1+\xi_i)=0 αi(yi(w⋅ϕ(xi)+b)−1+ξi)=0
根据上面的条件我们可以得出:
{ y i ( w ⃗ ⋅ ϕ ( x ⃗ i ) + b ) ≥ 1 α i = 0 y i ( w ⃗ ⋅ ϕ ( x ⃗ i ) + b ) = 1 0 ≤ α i ≤ C y i ( w ⃗ ⋅ ϕ ( x ⃗ i ) + b ) ≤ 1 α i = C \begin{cases}y_i(\vec w\cdot\phi(\vec x_i)+b)\ge1&\alpha_i=0\\y_i(\vec w\cdot\phi(\vec x_i)+b)=1&0\le\alpha_i\le C\\y_i(\vec w\cdot\phi(\vec x_i)+b)\le1&\alpha_i=C\end{cases} ⎩⎪⎨⎪⎧yi(w⋅ϕ(xi)+b)≥1yi(w⋅ϕ(xi)+b)=1yi(w⋅ϕ(xi)+b)≤1αi=00≤αi≤Cαi=C
由于 w ⃗ = ∑ j = 1 N α j y j ϕ ( x ⃗ j ) \vec w=\sum\limits^N_{j=1}\alpha_jy_j\phi(\vec x_j) w=j=1∑Nαjyjϕ(xj),我们令
g ( x ⃗ i ) = w ⃗ ⋅ ϕ ( x ⃗ i ) + b = ∑ j = 1 N α j y j K ( x ⃗ i , x ⃗ j ) + b g(\vec x_i)=\vec w\cdot\phi(\vec x_i)+b=\sum\limits^N_{j=1}\alpha_jy_jK(\vec x_i,\vec x_j)+b g(xi)=w⋅ϕ(xi)+b=j=1∑NαjyjK(xi,xj)+b
则可以推出以下三个条件:
{ y i g ( x ⃗ i ) ≥ 1 α i = 0 y i g ( x ⃗ i ) = 1 0 ≤ α i ≤ C y i g ( x ⃗ i ) ≤ 1 α i = C \begin{cases}y_ig(\vec x_i)\ge1&\alpha_i=0\\y_ig(\vec x_i)=1&0\le\alpha_i\le C\\y_ig(\vec x_i)\le1&\alpha_i=C\end{cases} ⎩⎪⎨⎪⎧yig(xi)≥1yig(xi)=1yig(xi)≤1αi=00≤αi≤Cαi=C
选择第一个变量
在 S M O SMO SMO 中,我们称第一个变量为外循环。外循环取的是样本中违反 K K T KKT KKT 条件最严重的点。
我们可以借助上面推出的条件来度量一个点违反 K K T KKT KKT 条件的程度,具体来说,我们定义三份“差异向量”
c ⃗ ( k ) = ( c 1 ( k ) , c 2 ( k ) , ⋯ , c N ( k ) ) , k = 1 , 2 , 3 c i ( k ) = y i g ( x ⃗ i ) − 1 \vec c^{(k)}=(c_1^{(k)},c_2^{(k)},\cdots,c_N^{(k)}),\ k=1,2,3\\c_i^{(k)}=y_ig(\vec x_i)-1 c(k)=(c1(k),c2(k),⋯,cN(k)), k=1,2,3ci(k)=yig(xi)−1
其中第 k k k 个向量对应着第 k k k 个条件。对于不同的条件,我们按不同方式将对应向量的某些位置置为 0。
-
第一个条件: α i = 0 ⇒ c i ( 1 ) ≥ 0 \alpha_i=0\Rightarrow c_i^{(1)}\ge0 αi=0⇒ci(1)≥0 若满足:
- α i > 0 \alpha_i>0 αi>0 且 c i ( 1 ) ≤ 0 c_i^{(1)}\le0 ci(1)≤0
- α i = 0 \alpha_i=0 αi=0 且 c i ( 1 ) ≥ 0 c_i^{(1)}\ge0 ci(1)≥0
-
第二个条件: 0 ≤ α i ≤ C ⇒ c i ( 2 ) = 0 0\le\alpha_i\le C\Rightarrow c_i^{(2)}=0 0≤αi≤C⇒ci(2)=0 若满足:
- α i = 0 \alpha_i=0 αi=0 或 α i = C \alpha_i=C αi=C 且 c i ( 2 ) ≠ 0 c_i^{(2)}\ne0 ci(2)=0
- 0 ≤ α i ≤ C 0\le\alpha_i\le C 0≤αi≤C 且 c i ( 2 ) = 0 c_i^{(2)}=0 ci(2)=0
-
第三个条件: α i = C ⇒ c i ( 3 ) ≤ 0 \alpha_i=C\Rightarrow c_i^{(3)}\le0 αi=C⇒ci(3)≤0
- α i < C \alpha_i< C αi<C 且 c i ( 3 ) ≥ 0 c_i^{(3)}\ge0 ci(3)≥0
- α i = C \alpha_i=C αi=C 且 c i ( 3 ) ≤ 0 c_i^{(3)}\le0 ci(3)≤0
最后只需要将这三个差异向量的平方相加作为“损失”,从而直接选出损失最大的 α i \alpha_i αi 作为外循环即可。
选择第二个变量
第二个变量成为内循环,只需要简单的随机选取一个即可。
取出这两个变量之后,把其它变量看做常数,这样优化目标函数就变成了带约束的二次规划问题。
目标函数的优化
假设选择的两个变量是
α
1
,
α
2
\alpha_1,\alpha_2
α1,α2,把其它的
α
i
\alpha_i
αi 都看作常数。定义
K
i
j
=
K
(
x
⃗
i
,
x
⃗
j
)
K_{ij}=K(\vec x_i,\vec x_j)
Kij=K(xi,xj) 那么原先的优化目标函数就成了:
min
α
1
,
α
2
1
2
K
11
α
1
2
+
1
2
K
2
,
2
α
2
2
+
y
1
y
2
K
1
,
2
α
1
α
2
−
(
α
1
+
α
2
)
+
y
1
α
1
∑
i
=
3
N
y
i
α
i
K
i
,
1
+
y
2
α
2
∑
i
=
3
N
y
i
α
i
K
i
,
2
+
c
s
.
t
.
α
1
y
1
+
α
2
y
2
=
C
0
≤
α
i
≤
C
,
i
=
1
,
2
\min\limits_{\alpha_1,\alpha_2}\frac{1}{2}K_{11}\alpha_1^2+\frac{1}{2}K_{2,2}\alpha_2^2+y_1y_2K_{1,2}\alpha_1\alpha_2-(\alpha_1+\alpha_2)+y_1\alpha_1\sum\limits^N_{i=3}y_i\alpha_iK_{i,1}+y_2\alpha_2\sum\limits^N_{i=3}y_i\alpha_iK_{i,2}+c\\s.t.\ \ \alpha_1y_1+\alpha_2y_2=C\\0\le\alpha_i\le C,\ i=1,2
α1,α2min21K11α12+21K2,2α22+y1y2K1,2α1α2−(α1+α2)+y1α1i=3∑NyiαiKi,1+y2α2i=3∑NyiαiKi,2+cs.t. α1y1+α2y2=C0≤αi≤C, i=1,2
无约束求极值
我们先暂时不管约束条件
0
≤
α
i
≤
C
,
i
=
1
,
2
0\le\alpha_i\le C,i=1,2
0≤αi≤C,i=1,2,通过
α
1
=
(
C
−
α
2
y
2
)
y
1
\alpha_1=(C-\alpha_2y_2)y_1
α1=(C−α2y2)y1 可以将目标函数替换成单变量形式:
min
ϕ
(
α
2
)
=
1
2
K
1
,
1
(
C
−
α
2
y
2
)
2
+
1
2
K
2
,
2
α
2
2
+
y
2
K
12
α
2
(
C
−
α
2
y
2
)
−
y
1
(
C
−
α
2
y
2
)
−
α
2
+
(
C
−
α
2
y
2
)
∑
i
=
3
N
α
i
y
i
K
1
,
i
+
y
2
α
2
∑
j
=
3
N
α
j
y
j
K
2
,
j
+
c
\min \phi(\alpha_2)=\frac12K_{1,1}(C-\alpha_2y_2)^2+\frac12K_{2,2}\alpha^2_2+y_2K_{12}\alpha_2(C-\alpha_2y_2)-y_1(C-\alpha_2y_2)-\alpha_2+(C-\alpha_2y_2)\sum\limits^N_{i=3}\alpha_iy_iK_{1,i}+y_2\alpha_2\sum\limits^N_{j=3}\alpha_jy_jK_{2,j}+c
minϕ(α2)=21K1,1(C−α2y2)2+21K2,2α22+y2K12α2(C−α2y2)−y1(C−α2y2)−α2+(C−α2y2)i=3∑NαiyiK1,i+y2α2j=3∑NαjyjK2,j+c
我们设更新前的值为
α
i
o
l
d
\alpha_i^{old}
αiold, 更新后的值为
α
i
n
e
w
\alpha_i^{new}
αinew,对目标函数进行一个偏导的求:
∂
ϕ
(
α
2
n
e
w
)
∂
α
2
n
e
w
=
(
K
1
,
1
+
K
2
,
2
−
2
K
1
,
2
)
α
2
n
e
w
−
K
1
,
1
C
y
2
+
K
1
,
2
C
y
2
+
y
1
y
2
−
1
−
y
2
∑
i
=
3
N
α
i
y
i
K
1
,
i
+
y
2
∑
j
=
3
N
α
j
y
j
K
2
,
j
=
0
\frac{\partial\phi(\alpha_2^{new})}{\partial\alpha_2^{new}}=(K_{1,1}+K_{2,2}-2K_{1,2})\alpha_2^{new}-K_{1,1}Cy_2+K_{1,2}Cy_2+y_1y_2-1-y_2\sum\limits^N_{i=3}\alpha_iy_iK_{1,i}+y_2\sum\limits^N_{j=3}\alpha_jy_jK_{2,j}=0
∂α2new∂ϕ(α2new)=(K1,1+K2,2−2K1,2)α2new−K1,1Cy2+K1,2Cy2+y1y2−1−y2i=3∑NαiyiK1,i+y2j=3∑NαjyjK2,j=0
因为 SVM 中数据点的预测值为: f ( x ⃗ j ) = ∑ i = 1 N α i y i K ( x ⃗ i , x ⃗ j ) + b f(\vec x_j)=\sum\limits^N_{i=1}\alpha_iy_iK(\vec x_i,\vec x_j)+b f(xj)=i=1∑NαiyiK(xi,xj)+b 因此有:
- ∑ i = 3 N α i y i K 1 , i = f ( x ⃗ 1 ) − α 1 n e w y 1 K 1 , 1 − α 2 n e w y 2 K 1 , 2 − b \sum\limits^N_{i=3}\alpha_iy_iK_{1,i}=f(\vec x_1)-\alpha_1^{new}y_1K_{1,1}-\alpha_2^{new}y_2K_{1,2}-b i=3∑NαiyiK1,i=f(x1)−α1newy1K1,1−α2newy2K1,2−b
- ∑ i = 3 N α i y i K 2 , i = f ( x ⃗ 2 ) − α 1 n e w y 1 K 1 , 2 − α 2 n e w y 2 K 2 , 2 − b \sum\limits^N_{i=3}\alpha_iy_iK_{2,i}=f(\vec x_2)-\alpha_1^{new}y_1K_{1,2}-\alpha_2^{new}y_2K_{2,2}-b i=3∑NαiyiK2,i=f(x2)−α1newy1K1,2−α2newy2K2,2−b
另有: C = α 1 o l d y 1 + α 2 o l d y 2 C=\alpha_1^{old}y_1+\alpha_2^{old}y_2 C=α1oldy1+α2oldy2
将上面三个式子带入偏导中并化简得:
(
K
1
,
1
+
K
2
,
2
−
2
K
1
,
2
)
α
2
n
e
w
=
(
K
1
,
1
+
K
2
,
2
−
2
K
1
,
2
)
α
2
o
l
d
+
y
2
[
(
f
(
x
⃗
1
)
−
y
1
)
−
(
f
(
x
⃗
2
)
−
y
2
)
]
(K_{1,1}+K_{2,2}-2K_{1,2})\alpha_2^new=(K_{1,1}+K_{2,2}-2K_{1,2})\alpha_2^{old}+y_2[(f(\vec x_1)-y_1)-(f(\vec x_2)-y_2)]
(K1,1+K2,2−2K1,2)α2new=(K1,1+K2,2−2K1,2)α2old+y2[(f(x1)−y1)−(f(x2)−y2)]
设
η
=
K
1
,
1
+
K
2
,
2
−
2
K
1
,
2
\eta=K_{1,1}+K_{2,2}-2K_{1,2}
η=K1,1+K2,2−2K1,2,则有:
{
α
2
n
e
w
=
α
2
o
l
d
+
y
2
[
(
f
(
x
⃗
1
)
−
y
1
)
−
(
f
(
x
⃗
2
)
−
y
2
)
]
η
α
1
o
l
d
y
1
+
α
2
o
l
d
y
2
=
α
1
n
e
w
y
1
+
α
2
n
e
w
y
2
\begin{cases}\alpha_2^{new}=\alpha_2^{old}+\frac{y_2[(f(\vec x_1)-y_1)-(f(\vec x_2)-y_2)]}{\eta}\\\alpha_1^{old}y_1+\alpha_2^{old}y_2=\alpha_1^{new}y_1+\alpha_2^{new}y_2\end{cases}
{α2new=α2old+ηy2[(f(x1)−y1)−(f(x2)−y2)]α1oldy1+α2oldy2=α1newy1+α2newy2
这样我们就求出了这两个变量在无约束情况下的解析解。
加入约束
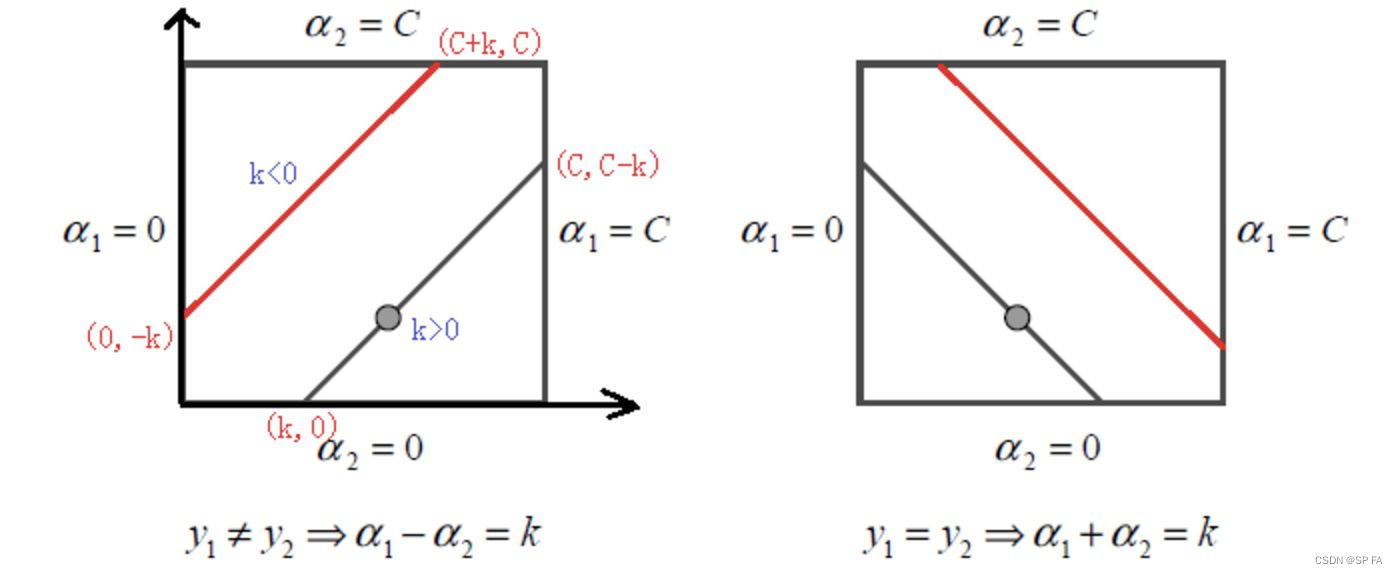
当 y 1 ≠ y 2 y_1\ne y_2 y1=y2 时,线性限制条件可以写成: α 1 − α 2 = k \alpha_1-\alpha_2=k α1−α2=k,根据 k k k 的正负可以得到不同的上下界,可以统一表示为:
- 下界: L = max ( 0 , α 2 − α 1 ) L=\max(0,\alpha_2-\alpha_1) L=max(0,α2−α1)
- 上界: H = min ( C , C + α 2 − α 1 ) H=\min(C,C+\alpha_2-\alpha_1) H=min(C,C+α2−α1)
当 y 1 = y 2 y_1=y_2 y1=y2 时,限制条件可以写成: α 1 + α 2 = k \alpha_1+\alpha_2=k α1+α2=k,此时上下界可以统一为:
- 下界: L = m a x ( 0 , α 1 + α 2 − C ) L=max(0,\alpha_1+\alpha_2-C) L=max(0,α1+α2−C)
- 上界: H = m i n ( C , α 1 + α 2 ) H=min(C,\alpha_1+\alpha_2) H=min(C,α1+α2)
由此可知,此约束为方形约束,下图为它的限制区域。
根据得到的上下界,我们可知加入约束后的
α
2
n
e
w
\alpha_2^{new}
α2new 为:
α
2
n
e
w
=
{
H
α
2
n
e
w
>
H
a
2
n
e
w
L
≤
α
2
n
e
w
≤
H
L
α
2
n
e
w
<
L
\alpha_2^{new}=\begin{cases}H&\alpha_2^{new}>H\\a_2^{new}&L\le\alpha_2^{new}\le H\\L&\alpha_2^{new}<L\end{cases}
α2new=⎩⎪⎨⎪⎧Ha2newLα2new>HL≤α2new≤Hα2new<L
这样就实现了对 α i , α j \alpha_i,\alpha_j αi,αj 的更新。
更新阈值 b
每次更新完一对 α i , α j \alpha_i,\alpha_j αi,αj 之后都需要重新计算阈值 b b b,因为它关系到 f ( x ⃗ ) f(\vec x) f(x) 的计算和优化时误差 E i E_i Ei 的计算。
当
0
<
a
l
p
h
a
1
n
e
w
<
C
0<alpha_1^{new}<C
0<alpha1new<C,根据
K
K
T
KKT
KKT 条件可知相应的数据点为支持向量,满足
y
1
(
w
T
+
b
)
=
1
y_1(w^T+b)=1
y1(wT+b)=1,两边同时乘
y
1
y_1
y1 得:
∑
i
=
1
N
α
i
y
i
K
i
,
1
+
b
=
y
1
\sum\limits^N_{i=1}\alpha_iy_iK_{i,1}+b=y_1
i=1∑NαiyiKi,1+b=y1,因此
b
1
n
e
w
b_1^{new}
b1new 的值为:
b
1
n
e
w
=
y
1
−
∑
i
=
3
N
α
i
y
i
K
i
,
1
−
α
1
n
e
w
y
1
K
1
,
1
−
α
2
n
e
w
y
2
K
2
,
1
b_1^{new}=y1-\sum\limits^N_{i=3}\alpha_iy_iK_{i,1}-\alpha_1^{new}y_1K_{1,1}-\alpha_2^{new}y_2K_{2,1}
b1new=y1−i=3∑NαiyiKi,1−α1newy1K1,1−α2newy2K2,1
其中, y 1 − ∑ i = 3 N α i y i K i , 1 = − E 1 + α 1 o l d y 1 K 1 , 1 + α 2 o l d y 2 K 2 , 1 + b o l d y1-\sum\limits^N_{i=3}\alpha_iy_iK_{i,1}=-E_1+\alpha_1^{old}y_1K_{1,1}+\alpha_2^{old}y_2K_{2,1}+b^{old} y1−i=3∑NαiyiKi,1=−E1+α1oldy1K1,1+α2oldy2K2,1+bold
当
0
<
α
2
n
e
w
<
C
0<\alpha_2^{new}<C
0<α2new<C 时:
b
2
n
e
w
=
−
E
2
−
y
1
K
1
,
2
(
α
1
n
e
w
−
α
1
o
l
d
)
−
y
2
K
2
,
2
(
α
2
n
e
w
−
α
2
o
l
d
)
+
b
o
l
d
b_2^{new}=-E_2-y_1K_{1,2}(\alpha_1^{new}-\alpha_1^{old})-y_2K_{2,2}(\alpha_2^{new}-\alpha_2^{old})+b^{old}
b2new=−E2−y1K1,2(α1new−α1old)−y2K2,2(α2new−α2old)+bold
当
b
1
,
b
2
b_1,b_2
b1,b2 都有效时他们是相等的,即
b
n
e
w
=
b
1
n
e
w
=
b
2
n
e
w
b^{new}=b_1^{new}=b_2^{new}
bnew=b1new=b2new
当
α
1
,
α
2
\alpha_1,\alpha_2
α1,α2 都在边界上,且
L
≠
H
L\ne H
L=H 时,选择它们的中点作为新的阈值:
b
n
e
w
=
b
1
n
e
w
+
b
2
n
e
w
2
b^{new}=\frac{b_1^{new}+b_2^{new}}2
bnew=2b1new+b2new
同步更新于:SP-FA 的博客
















 3626
3626











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











