







系统建模一般流程
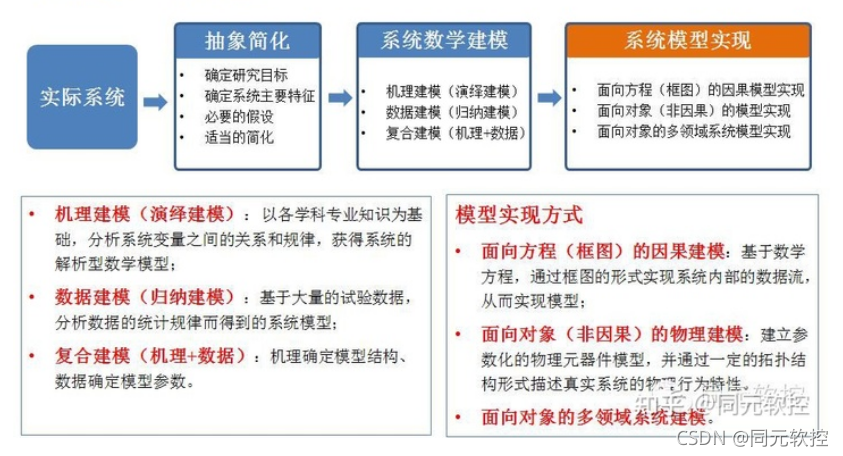
实际系统的分析方法大致类似,但对于实际系统的模型实现方式则有多种:
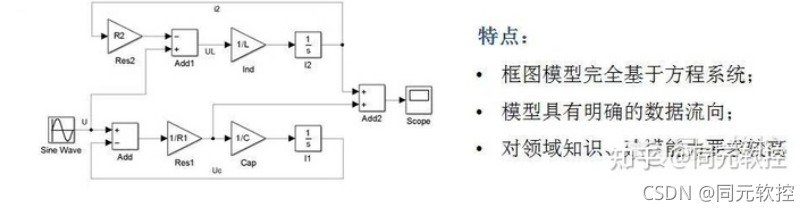
1、面向方程(图框)的因果建模
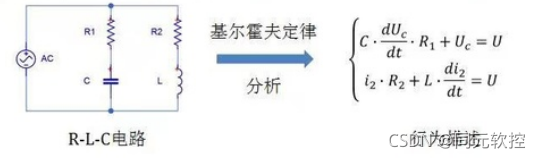
基于图框进行系统模型实现 的软件很多,如Simulink、AMESim(应用于控制领域)等,
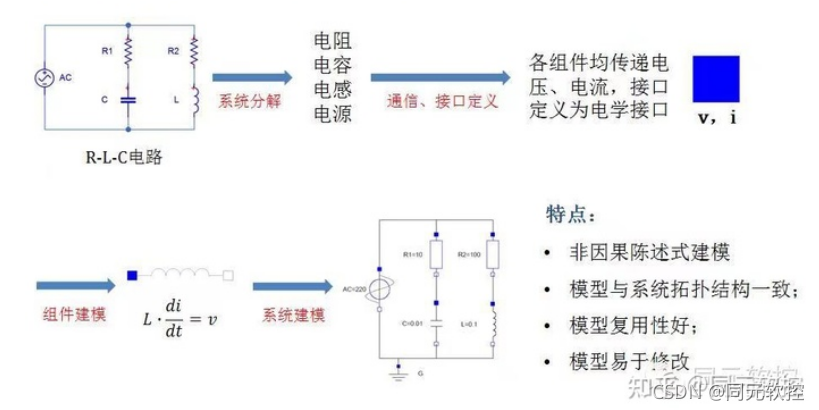
2、面向对象(非因果) 的物理建模
3、面向对象的多领域系统建模
单领域的建模已有很多成熟的实现方式,但传统的工具由于区分领域,导致多领域系统被人为地分割,导致系统级建模存在较大的局限性,因此,多领域系统同一平台建模是未来的发展趋势。

功能分析:
电机的速度可以通过一些类型的调整器控制,即在负载变化的情况下,电机要维持给定的转速。
系统分解:
该系统可以分解为旋转进行部件(电机、载荷)、电子电路子系统、控制子系统
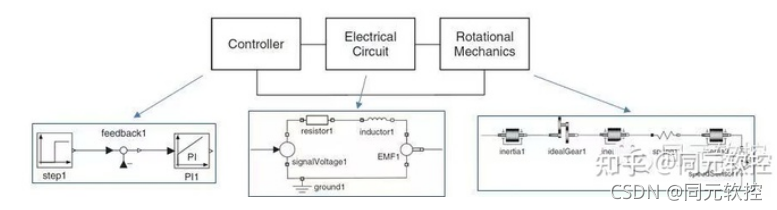
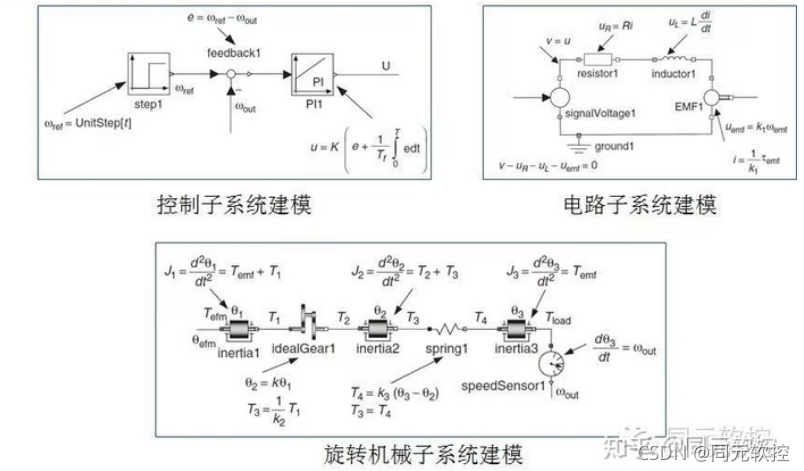
部件子系统建模 :
系统建模:
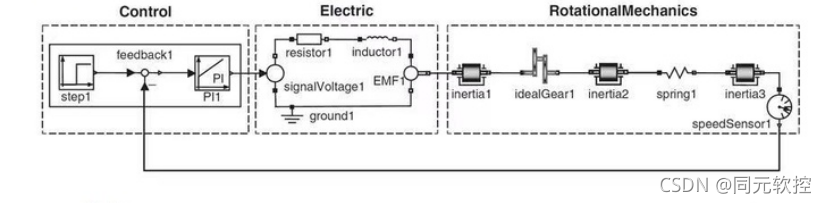
特点:
- 多领域系统统一平台建模
- 模型与系统物理拓扑结构一致
- 面向对象基于组件的建模,提高了模型复用性
- 模型易于修改

















 572
572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









