







 文章介绍了一个名为CADP的新数据集,旨在解决道路交通安全自动注释数据的缺乏问题。该数据集通过YouTube获取,包含230个视频,重点是第三人称视角的交通摄像机画面,用于物体检测、跟踪、碰撞检测等任务。数据集中的视频经过时间分割和密集时空注释,尤其关注小物体的精确检测,平均视频长度为366帧,且专注于交通事故事件。
文章介绍了一个名为CADP的新数据集,旨在解决道路交通安全自动注释数据的缺乏问题。该数据集通过YouTube获取,包含230个视频,重点是第三人称视角的交通摄像机画面,用于物体检测、跟踪、碰撞检测等任务。数据集中的视频经过时间分割和密集时空注释,尤其关注小物体的精确检测,平均视频长度为366帧,且专注于交通事故事件。
目标:
解决道路交通安全自动时空注释研究缺乏公开数据的问题。
第三人称视图比第一人称视角的优势是双重的:
(1)第三人称视图具有固定和更宽的视图,因为它们安装得更高;
(2)交通摄像机视图可以在公众中每天用于大量车辆,因此,每天每辆车的成本较低。
数据来源及制作方式:
利用YouTube的搜索引擎,并添加了注释过程,使用内部注释器和外部工作人员来构建一个新的数据集。车祸检测和预测(Car Accident Detection and Prediction,CADP)数据集有多种用途:时间分割、物体检测、跟踪、车辆碰撞、事故检测和预测。
数据集包含230个视频,每个视频包含至少一个从固定交通摄像机视图捕获的事故和1,416段交通事故。 此外,我们选择了具有高清质量的205段来注释时空数据,用于对象检测,跟踪和碰撞检测。
数据集组成分析:

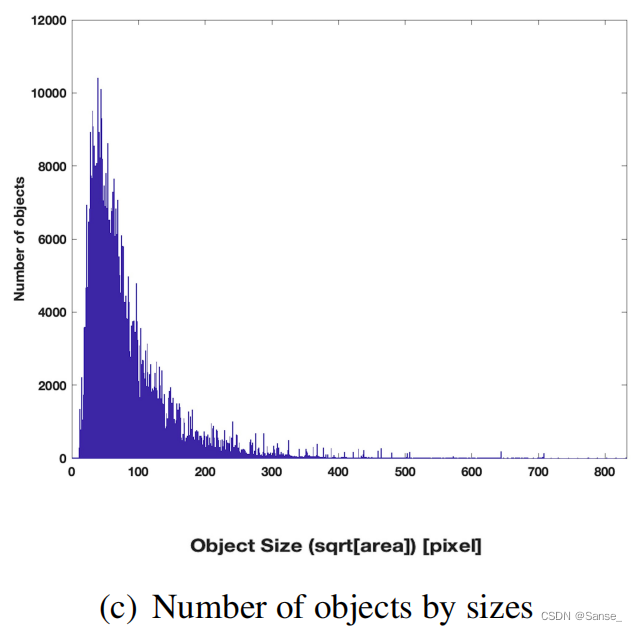

- 对象大小:如图1(c)所示,CADP数据集的主要部分被小对象占用。 长期以来,精确检测小物体一直是监控视频的一个挑战。 CADP数据集为这些对象提供了交通闭路电视录像的额外样本.
- 视频长度:CADP数据集中视频的平均长度为每个视频366帧,比[2]中的数据集长3.66倍。 最长的视频有554帧。UCF-Crimes[20]也有一个带有长视频的道路事件类别,但只提供了时间注释。 CADP数据集提供了一组具有完整时空注释的视频。
- •我们的数据集中仅针对交通事故的正面视频(1416视频)的数量远远大于UCF-Crimes(151道路交通事故视频)和DAD(约600视频)。 请注意,在CADP中,有多个事故的视频。 我们的数据集致力于交通事故(积极事件),我们没有收集负面事件的视频。 负面事件对于学习来说是至关重要的,但是负面事件的存在可以在其他数据集中很容易地找到,比如DETRAC。
- •第一次事故发生的时间是从视频中的时间0到第一次事故发生的持续时间。 在CADP数据集中的205个视频的完全注释子集中,此度量平均为3.69秒。 与DAD[2](4.50秒)相比,CADP的首次事故时间更短。 这种特性会影响事故预测实验的设计。
- 真实数据:CADP包含从YouTube收集的视频,这些视频是在各种相机类型和质量,天气条件下捕获的和编辑/重新采样的视频。
该数据集如何进行标注
- 经过改进步骤后,有230个视频被发现与我们的目标密切相关。 但是,对于每个视频,只有一部分与交通CCTV镜头相关。 因此,我们采用了一个两阶段的注释过程来获得这些相关的片段:首先我们要求人工注释者从每个视频中提取闭路电视交通摄像机片段的开始和结束时间戳,然后我们收集片段并使用VATIC工具进行时空注释(见图5)。
- 阶段1时间分割:大多数YouTube视频的持续时间为几分钟,但只包含几秒钟的事故。 使用BeaverDam工具,人工注释者报告每个相关片段的开始和结束时间戳。 根据报告的结果,我们使用OpenCV3提取了相关片段的帧。
- 阶段2密集时空注释:在阶段1之后,我们有1416个积极事件的视频片段。 总持续时间为5.24小时,每个视频的平均帧数为366帧(见表1)。 大约80%的视频的长度从100到600帧。
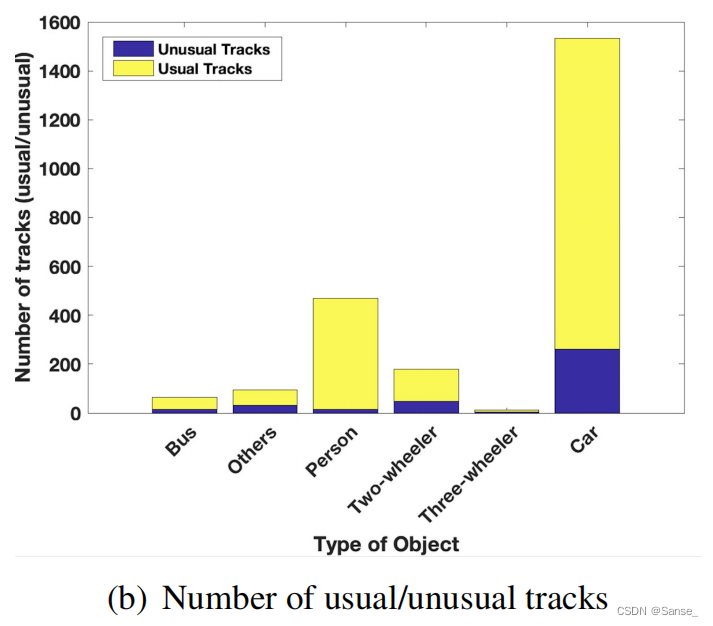
- 从短片(少于600帧)中,我们选择240个高清质量的视频来做密集的时空注释。从240个选定的视频中,注释者确定了35个与其他视频之一雷同的视频。 它们是具有相同内容的视频或另一个视频的裁剪(调整大小)版本。 最后,我们有205个带有完整注释的视频。 对象的类别是"人","汽车"(包括小型货车),"公共汽车","两轮车"(包括骑自行车者,摩托车),"三轮车"和"其他"(不属于其他类别的对象)。注释者被要求标记道路上的车辆/行人之间的碰撞何时发生,以及何时结束。
下载链接
CADP:A Novel Dataset for CCTV Traffic Camera based Accident Analysis
另有偿提供百度网盘下载链接,需要私聊我
参考文献:
Ankit Shah*, Jean Baptiste Lamare*, Tuan Nyugen Anh*, Alexander Hauptmann CADP: A Novel Dataset for CCTV Traffic Camera based Accident Analysis International Workshop on Traffic and Street Surveillance for Safety and Security, Nov 2018.

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









